一种智能汽车轨迹跟踪控制方法及系统
本发明属于控制系统,具体涉及一种智能汽车轨迹跟踪控制方法及系统。
背景技术:
1、随着控制技术的日益成熟以及驾驶员对于安全性、操纵性、舒适性要求的不断提高,车辆智能化研究受到了广泛关注。车辆轨迹跟踪是智能驾驶过程中的重要一环,对于自主完成变道超车、自动驶入、驶出匝道等操作至关重要。
2、当前反馈控制技术是一种广泛应用于轨迹跟踪的有效方法,通过测量系统的输出并将其与期望输出进行比较,然后调整系统的输入以减小输出误差,使系统能够更好地跟踪期望轨迹。
3、然而,反馈控制技术的性能高度依赖于控制器的参数调整。在不同工况和车辆动力学变化时,需要进行精细调整,这可能需要经验丰富的工程师和耗费时间。再者,反馈控制通常基于线性控制理论设计,对于具有强烈非线性特性的系统,可能需要采用线性化方法,而这在某些情况下可能不够准确。
技术实现思路
1、为了解决当前采用反馈控制技术,性能高度依赖于控制器的参数调整。在不同工况和车辆动力学变化时,需要进行精细调整,这可能需要经验丰富的工程师和耗费时间。再者,反馈控制通常基于线性控制理论设计,对于具有强烈非线性特性的系统,可能需要采用线性化方法,而这在某些情况下可能不够准确的技术问题,本发明提供一种智能汽车轨迹跟踪控制方法及系统。
2、第一方面
3、本发明提供了一种智能汽车轨迹跟踪控制方法,包括:
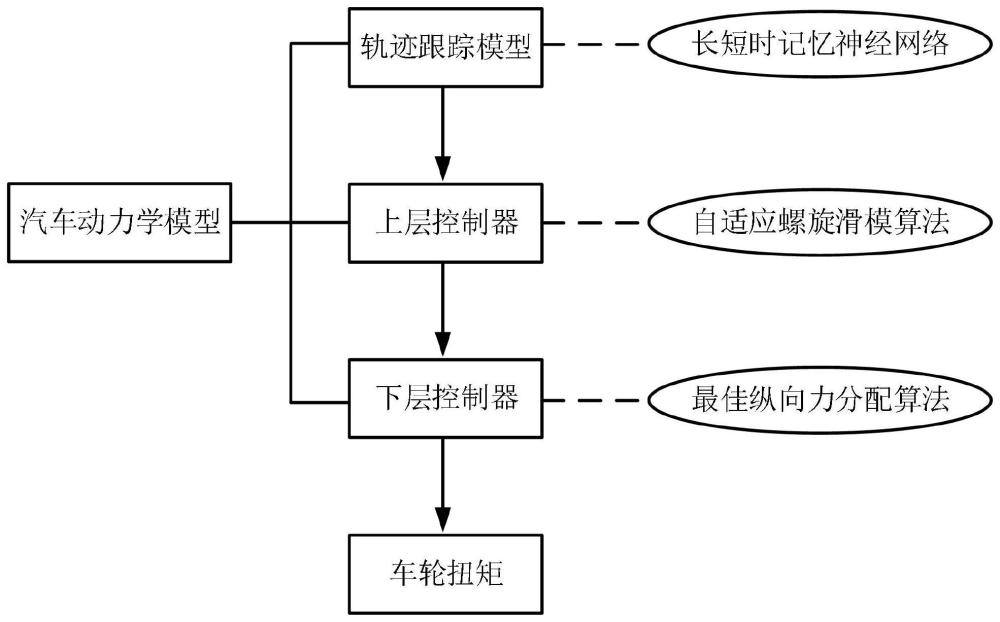
4、s1:获取汽车动力学模型;
5、s2:通过基于长短时记忆神经网络的轨迹跟踪模型,对汽车轨迹进行跟踪,预测出汽车的横摆角速度和质心侧偏角;
6、s3:通过基于自适应螺旋滑模算法的上层控制器,根据预测出的横摆角速度和质心侧偏角,确定保持汽车轨迹的最佳附加横摆力矩;
7、s4:通过基于最佳纵向力分配算法的下层控制器,根据保持汽车轨迹的最佳附加横摆力矩,确定各个车轮的扭矩分配,并基于扭矩分配结果控制汽车。
8、第二方面
9、本发明提供了一种智能汽车轨迹跟踪控制系统,包括处理器和用于存储处理器可执行指令的存储器;所述处理器被配置为调用所述存储器存储的指令,以执行第一方面中的智能汽车轨迹跟踪控制方法。
10、与现有技术相比,本发明至少具有以下有益技术效果:
11、(1)在本发明中,通过基于长短时记忆神经网络的轨迹跟踪模型,对汽车轨迹进行跟踪,神经网络的端到端学习能力允许系统从数据中提取复杂的非线性关系,从而减少了对精细参数调整的需求,无需依赖于手动调整控制器的参数,省时省力,长短时记忆神经网络可以直接学习输入与输出之间的映射,提升非线性特性处理能力,提高轨迹跟踪的准确性和鲁棒性。
12、(2)在本发明中,使用自适应螺旋滑模算法可以有效地处理系统的不确定性和外部扰动,有助于实现对横摆角速度和质心侧偏角的自适应控制,提高系统的鲁棒性和性能。
13、(3)在本发明中,采用最佳纵向力分配算法有助于实现对车轮扭矩的智能分配,以达到最佳的横摆力矩,有助于提高轨迹跟踪的精确性和稳定性。
14、(4)在本发明中,通过上下两层控制器的协同工作,实现了全面的轨迹跟踪控制,上层控制器负责生成横摆力矩,而下层控制器则通过最佳纵向力分配实现对车轮扭矩的智能控制,使得整个系统更具鲁棒性和适应性。
技术特征:
1.一种智能汽车轨迹跟踪控制方法,其特征在于,包括:
2.根据权利要求1所述的智能汽车轨迹跟踪控制方法,其特征在于,所述汽车动力学模型具体包括:
3.根据权利要求1所述的智能汽车轨迹跟踪控制方法,其特征在于,所述s2具体包括:
4.根据权利要求3所述的智能汽车轨迹跟踪控制方法,其特征在于,所述基于长短时记忆神经网络的轨迹跟踪模型的训练方法包括:
5.根据权利要求4所述的智能汽车轨迹跟踪控制方法,其特征在于,所述基于长短时记忆神经网络的轨迹跟踪模型的目标函数具体为:
6.根据权利要求2所述的智能汽车轨迹跟踪控制方法,其特征在于,所述s3具体包括:
7.根据权利要求6所述的智能汽车轨迹跟踪控制方法,其特征在于,所述滑模面调节项具体为:
8.根据权利要求6所述的智能汽车轨迹跟踪控制方法,其特征在于,所述自适应螺旋滑模控制增益具体为:
9.根据权利要求1所述的智能汽车轨迹跟踪控制方法,其特征在于,所述s4具体包括:
10.一种智能汽车轨迹跟踪控制系统,其特征在于,包括处理器和用于存储处理器可执行指令的存储器;所述处理器被配置为调用所述存储器存储的指令,以执行权利要求1至9中任意一项所述的智能汽车轨迹跟踪控制方法。
技术总结
本发明公开了一种智能汽车轨迹跟踪控制方法及系统,属于控制系统技术领域,方法包括:获取汽车动力学模型;通过基于长短时记忆神经网络的轨迹跟踪模型,对汽车轨迹进行跟踪,预测出汽车的横摆角速度和质心侧偏角;通过基于自适应螺旋滑模算法的上层控制器,根据预测出的横摆角速度和质心侧偏角,确定保持汽车轨迹的最佳附加横摆力矩;通过基于最佳纵向力分配算法的下层控制器,根据最佳附加横摆力矩,确定各个车轮的扭矩分配,并基于扭矩分配结果控制汽车。本发明中,神经网络的端到端学习能力允许系统从数据中提取复杂的非线性关系,无需依赖于手动调整控制器的参数,省时省力,提升非线性特性处理能力,提高轨迹跟踪的准确性和鲁棒性。
技术研发人员:胡文娟,吴书龙,徐律,龚文资
受保护的技术使用者:无锡商业职业技术学院
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!