一种基于全面智能环境感知与应对系统的制作方法
本发明涉及汽车智能环境感知,具体为一种基于全面智能环境感知与应对系统。
背景技术:
1、随着科技的不断发展,汽车行业也在不断地进行创新和升级。汽车智能化技术重点研发驾驶舱内机械操作更便捷的同时,还需要注重研发车机系统智能感知驾驶环境与智能应对驾驶干扰因素。在汽车的各种功能中,全面智能环境感知与应对系统无疑是一项非常实用的技术。它不仅能够提高驾驶的安全性,还能为驾驶者带来更加舒适的驾驶体验。全面智能环境感知与应对系统是一种集成了多种传感器、控制器和算法的先进技术,旨在实时监测汽车周围的环境信息,并根据这些信息对汽车进行智能控制,以实现安全、高效和舒适的驾驶。全面智能环境感知与应对系统需要在环境感知、决策规划、自适应巡航控制、车道保持辅助、泊车辅助和紧急制动与碰撞预警多个方面进行功能优化。全面智能环境感知与应对系统通过搭载在汽车上的各种传感器(如摄像头、雷达、激光雷达等)实时收集周围环境的信息进行感知分析,包括道路状况、交通信号、行人、自行车、其他车辆等。通过对这些信息的实时处理和分析,系统能够准确地了解汽车所处的环境和周围物体的位置、速度、方向等信息。然后,基于收集到的环境信息,全面智能环境感知与应对系统会对汽车进行智能决策和规划。例如,系统可以根据道路状况和交通信号自动调整车速,避免超速或低速行驶;在遇到行人或其他障碍物时,系统可以自动减速或刹车,以确保行车安全;在拥堵路段,系统可以自动选择最佳的行驶路线,提高通行效率。全面智能环境感知与应对系统可以实现自适应巡航控制功能,即在跟随前车行驶时,根据前车的速度自动调整车速,保持与前车的安全距离。此外,系统还可以识别并预测前方车辆的行驶轨迹,提前进行制动或加速,以避免碰撞。全面智能环境感知与应对系统可以实现车道保持辅助功能,即在行驶过程中,系统可以实时监测汽车是否偏离车道,并在必要时通过自动转向控制来纠正汽车的行驶方向,确保汽车始终处于驾驶员设定的车道内。全面智能环境感知与应对系统可以实现自动泊车功能,即在停车过程中,系统可以实时监测周围环境,自动寻找合适的停车位,并在驾驶员的监控下完成泊车操作。此外,系统还可以实现倒车影像、倒车雷达等功能,帮助驾驶员更好地掌握车辆后方的情况。全面智能环境感知与应对系统可以在检测到前方有突发情况或与其他车辆发生碰撞风险时,及时发出警告并采取紧急制动措施,以减少事故的发生概率和减轻事故的影响。
2、目前,用户在陌生环境驾驶汽车时,传统车机智能感知系统受干扰因素影响较大,例如低能见度、陡峭坡道等复杂地形足以让司机情绪紧张,并且陌生驾驶环境因素复杂时,用户注意力易分散,应对突发情况无法及时应对,导致交通事故风险较高,严重威胁用户人身安全和财产安全。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于全面智能环境感知与应对系统,具备智能感知环境因素更全面、系统应对迅速安全性高等优点,解决了陌生驾驶环境因素复杂时用户注意力易分散,应对不及时导致事故风险高的问题。
3、(二)技术方案
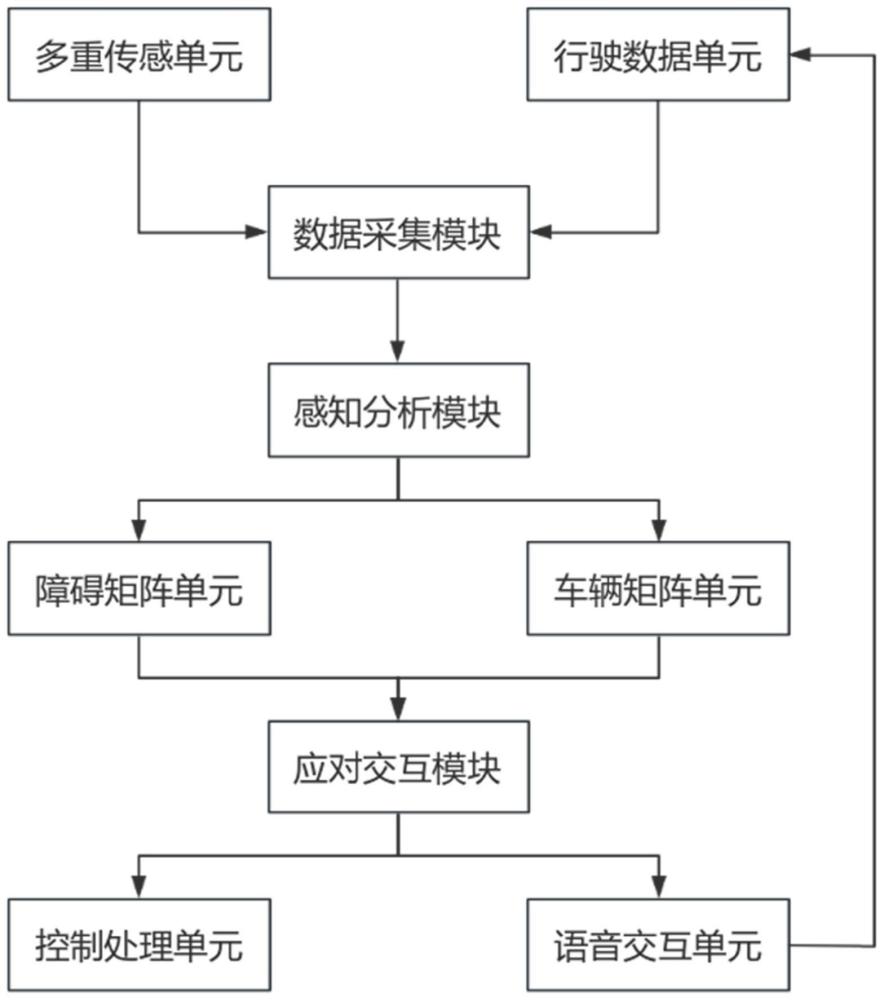
4、为实现上述目的,本发明提供如下技术方案:一种基于全面智能环境感知与应对系统,包括数据采集模块、感知分析模块和应对交互模块;
5、所述数据采集模块包括多重传感单元和行驶数据单元,所述多重传感单元通过红外线摄像头、气压计和激光雷达实时采集环境感知数据集,并通过网络传输至数据采集模块,所述行驶数据单元通过车机系统、dms系统和asr系统实时采集行驶数据集,并通过网络传输至数据采集模块,所述数据采集模块通过网络将环境感知数据集和行驶数据集传输至感知分析模块;
6、所述感知分析模块根据环境感知数据集特征和行驶数据集特征对环境感知数据集和行驶数据集进行编号,所述感知分析模块包括障碍矩阵单元和车辆矩阵单元,所述障碍矩阵单元根据环境感知数据集,计算出障碍矩阵zajz,并将数值传输至应对交互模块,所述车辆矩阵单元根据行驶数据集,计算出车辆矩阵cljz和安全车距aqcj,并将数值传输至应对交互模块,所述感知分析模块通过网络连接应对交互模块;
7、所述应对交互模块根据障碍矩阵zajz、车辆矩阵cljz,计算出实际车距sjcj,并与安全车距aqcj进行对比,判断行驶状态,生成信号,所述应对交互模块包括控制处理单元和语音交互单元,所述控制处理单元根据信号连接并控制电子制动系统,所述语音交互单元根据信号连接并控制智能语音音箱。
8、优选的,所述感知分析模块根据环境感知数据集特征和行驶数据集特征对环境感知数据集和行驶数据集进行编号,所述环境感知数据集编号为hjsx、hjqy和hjld,所述行驶数据集编号为xssd、xscs和xsy。
9、优选的,所述障碍矩阵单元根据环境感知数据集,计算出障碍矩阵zajz,其计算公式如下:
10、
11、公式中,zajz表示障碍矩阵,hjqy表示驾驶环境中的实际气压值,ckqy表示汽车能保证正常行驶状态下的参考气压值,hjsx3表示红外摄像头所感知的障碍面积,hjld3表示激光雷达所感知的障碍面积。
12、优选的,所述车辆矩阵单元根据行驶数据集,计算出车辆矩阵cljz,其计算公式如下:
13、cljz=xssd*hc2+xscs2
14、公式中,cljz表示车辆矩阵,xssd表示车身行驶的实际速度,hc2表示车身尺寸对应所需的缓冲面积,xscs2表示车身尺寸总面积。
15、优选的,所述车辆矩阵单元根据行驶数据集,计算出安全车距aqcj,其计算公式如下:
16、aqcj=xssd*sc+hjsx*bl
17、公式中,aqcj表示安全车距,xssd表示车身行驶的实际速度,sc表示车身尺寸对应所需的刹车距离,hjsx表示红外摄像头所感知的障碍因素,bl表示环境障碍因素变量所对应的干扰参考值。
18、优选的,所述应对交互模块根据障碍矩阵zajz、车辆矩阵cljz,计算出实际车距sjcj,其计算公式如下:
19、sjcj=zlc-cljz-zajz
20、公式中,sjcj表示实际车距,zlc表示行驶环境中多元传感单元所能探测的当前道路总面积,cljz表示车辆矩阵总面积,zajz表示障碍矩阵总面积。
21、优选的,所述应对交互模块根据实际车距sjcj,与安全车距aqcj进行对比,判断行驶状态,生成信号,所述实际车距sjcj大于安全车距aqcj时,生成安全行驶信号,所述实际车距sjcj大于安全车距aqcj时,生成危险行驶信号。
22、优选的,所述应对交互模块生成安全信号时,通过网络传输至语音交互单元,所述语音交互单元根据安全信号连接并控制智能语音音箱,一次性输出语音提示用户继续保持当下行驶状态。
23、优选的,所述应对交互模块生成危险信号时,通过网络传输至控制处理单元和语音交互单元,所述控制处理单元根据危险信号连接并控制电子制动系统进行制动限速,所述语音交互单元根据危险信号连接并控制智能语音音箱,多次循环输出语音提示用户提高注意力减速行驶。
24、优选的,所述语音交互单元多次循环输出语音提示用户提高注意力减速行驶时,用户需回复关键词语音,所述行驶数据单元根据用户语音识别到关键词后停止循环输出。
25、与现有技术相比,本发明提供了一种基于全面智能环境感知与应对系统,具备以下有益效果:
26、1、本发明通过数据采集模块设置多重传感单元和行驶数据单元,通过红外线摄像头、气压计、激光雷达、车机系统、dms系统和asr系统实时采集环境感知数据集和行驶数据集,感知分析模块对环境感知数据集和行驶数据集进行编号,通过障碍矩阵单元计算出障碍矩阵zajz,能够全面感知驾驶环境干扰因素,有利于后续计算输出相应的指令,使驾驶员能够更好的适应复杂的驾驶情境,提高行车安全性,感知分析模块通过车辆矩阵单元计算出车辆矩阵cljz和安全车距aqcj,精确测算车辆行驶所需的占地面积,避免出现道路过于狭窄无法通行的情况,智能感知环境因素更全面,更能适应复杂的驾驶情境,避免用户自主判断操作时引起的注意力分散,提高行车安全性。
27、2、本发明通过应对交互模块根据障碍矩阵zajz、车辆矩阵cljz,计算出实际车距sjcj,精确感知障碍矩阵zajz和车辆矩阵cljz的真实距离,避免用户自主判断有所偏差,应对交互模块根据实际车距sjcj与安全车距aqcj进行对比,判断行驶状态,生成安全信号或危险信号,语音交互单元根据安全信号连接并控制智能语音音箱,一次性输出语音提示用户继续保持当下行驶状态,减缓用户因陌生驾驶环境所产生的的紧张情绪,控制处理单元根据危险信号连接并控制电子制动系统进行制动限速,语音交互单元根据危险信号连接并控制智能语音音箱,多次循环输出语音提示用户提高注意力减速行驶,智能辅助驾驶,提高行车安全性,避免碰撞事故的发生,语音交互单元多次循环输出语音提示用户提高注意力减速行驶时,用户需回复关键词语音,行驶数据单元根据用户语音识别到关键词后停止循环输出,保证用户在注意力集中的情况下驾驶车辆,能够及时察觉前方交通状态,反应迅速并及时判断应对突发情况,系统应对迅速安全性高,驾乘体验感更佳。
- 还没有人留言评论。精彩留言会获得点赞!