一种基于九宫格计算逻辑和算法的智能驾驶决策系统和算法的制作方法
本发明涉及智能驾驶,具体而言,涉及一种基于九宫格计算逻辑和算法的智能驾驶决策系统和算法。
背景技术:
1、智能驾驶,是在普通车辆的基础上增加了先进的传感器(雷达、摄像)、控制器、执行器等装置,并融合网络技术与通信技术,通过车载传感系统和信息终端实现车—车、车—路、车—人信息共享及智能信息交换,使车辆具备智能感知、智能决策等功能,可实现高效、节能、安全行驶的一种新兴的汽车体系,能够自动分析车辆行驶的安全及危险状态,并使车辆按照人的意愿到达目的地,最终实现代替人来操作的目的以减轻人驾驶汽车的负担。
2、目前智能驾驶的汽车感知系统零部件越来越多,而感知的数据量也越来越大,计算的负荷也越来越重,目前的智能驾驶都是通过海量的数据收集、计算、决策、执行来完成的,主要是通过大模型计算以及穷尽各种车辆状态的数据模型来计算车辆的智能驾驶状态。
3、但汽车感知系统中,收集绝大多数数据是无效的。如何通过计算模型简化数据量,并计算出智能驾驶系统最优的行车路径和状态是各个智能驾驶系统需要考虑的。
技术实现思路
1、鉴于此,本发明提出了一种基于九宫格计算逻辑和算法的智能驾驶决策系统和算法,主要是为了解决如何通过智能驾驶数据进行分区处理,从而确认最佳的智能驾驶指令的问题。
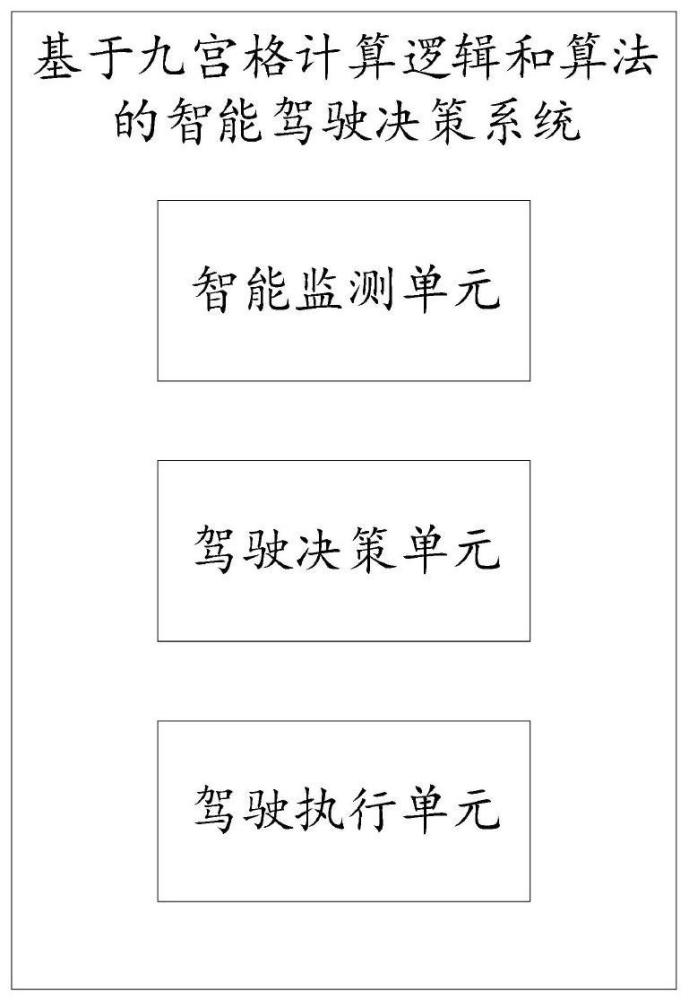
2、一个方面,本发明提出了一种基于九宫格计算逻辑和算法的智能驾驶决策系统,该系统包括:
3、智能监测单元,包括有八个,设置于驾驶车辆上,所述智能监测单元用于实时监测所述驾驶车辆的行车区域,获得实时视频监测数据;
4、驾驶决策单元,用于获取所述智能监测单元监测获得的所述实时视频监测数据,并根据所述实时视频监测数据确定驾驶指令;
5、驾驶执行单元,用于获取所述驾驶决策单元确定的所述驾驶指令,并根据所述驾驶指令控制所述驾驶车辆在预设行驶路线上行驶。
6、在本技术的一些实施例中,所述智能监测单元用于实时监测所述驾驶车辆的行车区域,获得实时视频监测数据时,包括:
7、通过九宫格划分所述行车区域,以所述驾驶车辆为所述行车区域的九宫格中心区域,所述智能监测单元用于实时监测九宫格剩余区域,所述九宫格剩余区域包括正前区域、左前区域、右前区域、左侧区域、右侧区域、正后区域、左后区域和右后区域。
8、在本技术的一些实施例中,所述驾驶决策单元用于获取所述智能监测单元监测获得的所述实时视频监测数据,并根据所述实时视频监测数据确定驾驶指令时,包括:
9、所述驾驶决策单元还用于获取所述驾驶车辆的驾驶状态;
10、当所述驾驶车辆的驾驶状态为启动时,所述驾驶决策单元控制所述智能监测单元实时监测所述驾驶车辆的所述行车区域,以获得所述实时视频监测数据;
11、当所述驾驶车辆的驾驶状态为未启动时,所述驾驶决策单元不控制所述智能监测单元实时监测所述驾驶车辆的所述行车区域。
12、在本技术的一些实施例中,当所述驾驶车辆的驾驶状态为启动,所述驾驶决策单元控制所述智能监测单元实时监测所述驾驶车辆的所述行车区域,以获得所述实时视频监测数据时,包括:
13、所述驾驶决策单元根据所述行车区域的所述实时视频监测数据判断所述驾驶车辆的停车位置类型:
14、当所述停车位置类型为侧方位停车时,所述驾驶决策单元获取并根据所述左侧区域、左后区域和正后区域的所述实时视频监测数据确定所述驾驶车辆左后侧是否存在行车,当所述驾驶车辆左后侧不存在行车时,所述驾驶决策单元确定所述驾驶指令为自动出库;
15、当所述停车位置类型为t型停车且车头在外时,所述驾驶决策单元获取并根据所述左前区域、右前区域和正前区域的所述实时视频监测数据确定所述驾驶车辆前侧是否存在行车,当所述驾驶车辆前侧不存在行车时,所述驾驶决策单元确定所述驾驶指令为自动出库;
16、当所述停车位置类型为t型停车且车头在里时,所述驾驶决策单元获取并根据所述左后区域、右后区域和正后区域的所述实时视频监测数据确定所述驾驶车辆后侧是否存在行车,当所述驾驶车辆后侧不存在行车时,所述驾驶决策单元确定所述驾驶指令为自动出库。
17、在本技术的一些实施例中,当所述驾驶决策单元确定所述驾驶指令为自动出库后,包括:
18、所述驾驶执行单元根据所述驾驶指令控制所述驾驶车辆自动出库;
19、当所述驾驶车辆完成自动出库后,所述驾驶决策单元获取并根据所述正前区域的所述实时视频监测数据和所述左后区域、右后区域和正后区域的所述实时视频监测数据确定所述驾驶车辆正前侧和后侧是否存在行车:
20、当所述驾驶车辆正前侧或后侧存在行车时,所述驾驶决策单元判断行车与所述驾驶车辆之间的实时距离,当所述实时距离大于预设安全距离时,所述驾驶决策单元确定所述驾驶指令为正常行车,当所述实时距离小于等于预设安全距离时,所述驾驶决策单元确定驾驶指令为超车模式;
21、当所述驾驶车辆正前侧且后侧不存在行车时,所述驾驶决策单元确定驾驶指令为正常行车;
22、当所述驾驶指令为正常行车时,所述驾驶执行单元根据所述驾驶指令控制所述驾驶车辆以预设安全车速进行正常行驶。
23、在本技术的一些实施例中,当所述驾驶指令为超车模式时,包括:
24、所述驾驶决策单元获取并根据所述正前区域和左前区域的所述实时视频监测数据和所述左后区域和正后区域的所述实时视频监测数据确定所述驾驶车辆正前及左前侧和正后及左后侧是否存在行车;
25、当所述驾驶车辆正前及左前侧或正后及左后侧存在行车时,所述驾驶决策单元判断行车与所述驾驶车辆之间的实时距离,当所述实时距离大于预设安全距离时,所述驾驶决策单元控制所述驾驶执行单元执行所述驾驶指令,所述驾驶执行单元根据所述驾驶指令控制所述驾驶车辆以预设超车车速完成超车行驶;
26、当所述驾驶执行单元根据所述驾驶指令控制所述驾驶车辆以预设超车车速完成超车行驶后,所述驾驶决策单元通过所述预设行驶路线判断是否存在转向;
27、当存在转向时,所述驾驶决策单元确定所述驾驶指令为转向指令;
28、当不存在转向时,所述驾驶决策单元确定所述驾驶指令为正常行车。
29、在本技术的一些实施例中,当驾驶决策单元确定所述驾驶指令为转向指令时,包括:
30、所述驾驶决策单元根据所述预设行驶路线确定转向类型;
31、当所述转向类型为左转时,所述驾驶决策单元获取并根据所述正前区域和左前区域的所述实时视频监测数据确定所述驾驶车辆正前及左前侧是否存在行车:
32、当所述驾驶车辆正前及左前侧存在行车时,所述驾驶决策单元判断行车与所述驾驶车辆之间的实时距离,当所述实时距离大于预设安全距离时,所述驾驶决策单元控制所述驾驶执行单元执行所述驾驶指令,所述驾驶执行单元根据所述驾驶指令控制所述驾驶车辆以预设转向车速完成左转向行驶;
33、当所述驾驶车辆正前及左前侧不存在行车时,所述驾驶决策单元控制所述驾驶执行单元执行所述驾驶指令,所述驾驶执行单元根据所述驾驶指令控制所述驾驶车辆以预设转向车速完成左转向行驶。
34、在本技术的一些实施例中,当驾驶决策单元确定所述驾驶指令为转向指令时,还包括:
35、当所述转向类型为右转时,所述驾驶决策单元获取并根据所述正前区域和右前区域的所述实时视频监测数据确定所述驾驶车辆正前及右前侧是否存在行车:
36、当所述驾驶车辆正前及右前侧存在行车时,所述驾驶决策单元判断行车与所述驾驶车辆之间的实时距离,当所述实时距离大于预设安全距离时,所述驾驶决策单元控制所述驾驶执行单元执行所述驾驶指令,所述驾驶执行单元根据所述驾驶指令控制所述驾驶车辆以预设转向车速完成右转向行驶;
37、当所述驾驶车辆正前及右前侧不存在行车时,所述驾驶决策单元控制所述驾驶执行单元执行所述驾驶指令,所述驾驶执行单元根据所述驾驶指令控制所述驾驶车辆以预设转向车速完成右转向行驶。
38、在本技术的一些实施例中,当所述驾驶车辆完成转向后,包括:
39、所述驾驶决策单元根据所述预设行驶路线确定是否到达目的地;
40、当确定到达目的地后,所述驾驶决策单元确定所述驾驶指令为自动泊车;
41、当确定未到达目的地后,所述驾驶决策单元确定所述驾驶指令为正常行驶;
42、当所述驾驶指令为自动泊车时,所述驾驶决策单元根据所述行车区域的所述实时视频监测数据判断所述驾驶车辆的停车位置类型:
43、当所述停车位置类型为侧方位停车时,所述驾驶决策单元获取并根据所述左后区域、右后区域和正后区域的所述实时视频监测数据确定所述驾驶车辆后侧是否存在行车,当所述驾驶车辆后侧不存在行车时,所述驾驶决策单元确定所述驾驶指令为自动泊车;
44、当所述停车位置类型为t型停车且车头在外时,所述驾驶决策单元获取并根据所述左后区域、右后区域和正后区域的所述实时视频监测数据确定所述驾驶车辆后侧是否存在行车,当所述驾驶车辆后侧不存在行车时,所述驾驶决策单元确定所述驾驶指令为自动泊车;
45、当所述停车位置类型为t型停车且车头在里时,所述驾驶决策单元获取并根据所述左前区域、右前区域和正前区域的所述实时视频监测数据确定所述驾驶车辆前侧是否存在行车,当所述驾驶车辆前侧不存在行车时,所述驾驶决策单元确定所述驾驶指令为自动泊车。
46、另一个方面,本发明提出了一种基于九宫格计算逻辑和算法的智能驾驶决策算法,该算法包括:
47、实时监测驾驶车辆的行车区域,获得实时视频监测数据;
48、根据所述实时视频监测数据确定驾驶指令;
49、根据所述驾驶指令控制所述驾驶车辆在预设行驶路线上行驶。
50、与现有技术相比,本发明存在以下有益效果:本发明通过设置八个智能监测单元,分布于驾驶车辆上不同的位置,用于实时监测驾驶车辆的行车区域,获得关键的实时视频监测数据。驾驶决策单元负责获取智能监测单元实时监测获得的实时视频监测数据,利用先进的算法和人工智能技术,制定精准的驾驶指令。驾驶决策单元能够快速、准确地作出决策,以应对不同的驾驶场景和交通状况。驾驶执行单元负责执行由驾驶决策单元确定的驾驶指令。在行驶过程中,驾驶执行单元能够实时调整驾驶车辆的速度、方向和其他参数,以确保在预设行驶路线上安全行驶。驾驶执行单元通过不断调整车辆行为,实时反馈信息给其他系统单元,从而形成一个闭环系统,进一步提高驾驶安全性和效率。
- 还没有人留言评论。精彩留言会获得点赞!