一种零扭矩控制方法、系统、设备及介质与流程
本发明一般涉及车辆控制,具体涉及一种零扭矩控制方法、系统、设备及介质。
背景技术:
1、新能源汽车中电机控制的作用是输出控制力矩,在部分工况中,需要电机控制器进行零扭矩控制,比如说n档滑行或者后轮着地拖车等工况。
2、目前,常用的零扭矩控制方法是先通过台架标定各转速下电机零扭矩的电流值,将其写入电机控制器。当电机控制器接收到vcu发送的零扭矩指令时,查找并根据标定电流值驱动电机。但该方法输出扭矩受电机、环境温度以及标定精度影响较大,且新能源汽车上电驱动总成耦合减速箱,实际输出扭矩难以稳定在0n·m,导致车辆难以实际工作在零扭矩控制状态。
3、因此,亟需提供一种能解决上述问题的零扭矩控制方法。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,期望提供一种零扭矩控制方法、系统、设备及介质以解决上述问题。
2、本发明第一方面提供一种零扭矩控制方法,包括如下步骤:
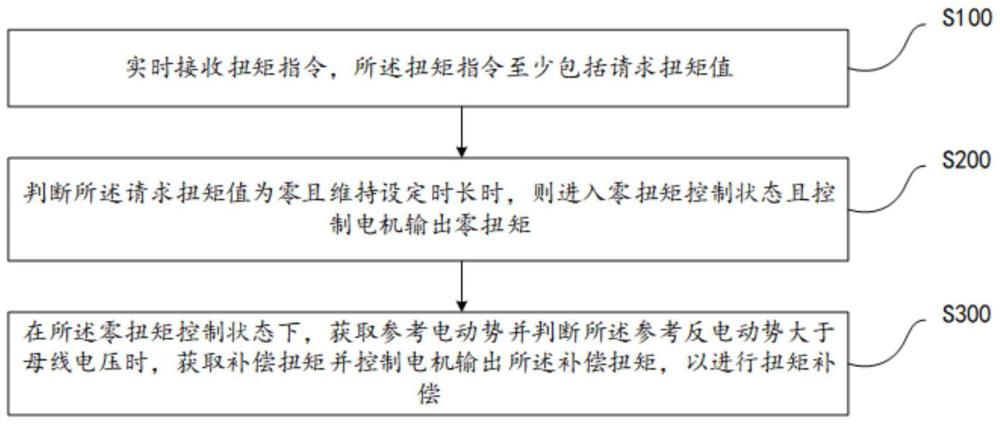
3、实时接收扭矩指令,所述扭矩指令至少包括请求扭矩值;
4、判断所述请求扭矩值为零且维持设定时长时,则进入零扭矩控制状态且控制电机输出零扭矩;
5、在所述零扭矩控制状态下,获取参考电动势并判断所述参考反电动势大于母线电压时,获取补偿扭矩并控制电机输出所述补偿扭矩,以进行扭矩补偿。
6、根据本发明提供的技术方案,获取参考电动势包括如下步骤:
7、获取第一反电动势和第二反电动势;所述第一反电动势为电机当前的实际反电动势值,所述第二反电动势为电机当前的理论反电动势值;
8、比较所述第一反电动势和所述第二反电动势,并选取二者中较小者作为所述参考电动势。
9、根据本发明提供的技术方案,获取第二反电动势包括如下步骤:
10、获取电机参数;所述电机参数包括电机极对数、电机磁链和电机的当前实际转速;
11、根据所述电机参数计算得到所述第二反电动势。
12、根据本发明提供的技术方案,所述获取补偿扭矩的方法包括如下步骤:
13、根据所述当前实际转速调用第一标定数据库,获得第一直流分量电流和第二直流分量电流;所述第一标定数据库包括在零扭矩控制状态下的若干个电机实际转速,以及与每个所述电机实际转速对应的第一直流分量电流和第二直流分量电流;
14、根据所述第一直流分量电流和所述第二直流分量电流控制电机输出所述补偿扭矩。
15、根据本发明提供的技术方案,构建所述第一标定数据库的方法包括如下步骤:
16、获取电源的三相电流,并通过clark变换将所述三相电流变换为两相电流;
17、获取参考样本集合,所述参考样本集合包括多组参考序列,所述参考序列至少包括电机的一个参考转速以及与所述参考转速对应的转子位置角;
18、任选一组所述参考序列,基于所述转子位置角,通过park变换获得与所述两相电流对应的第一直流分量参考电流和第二直流分量参考电流;
19、以所述参考转速作为所述第一转速,以所述第一直流分量参考电流作为第一直流分量电流,以所述第二直流分量参考电流作为第二直流分量电流,构建标定序列;
20、遍历所述参考样本集合,获得若干组所述标定序列;根据若干组所述标定序列构建所述第一标定数据库。
21、根据本发明提供的技术方案,在所述零扭矩控制状态下,还包括如下步骤:
22、实时获取车轮转速,并根据所述车轮转速和车轮与电机之间的传动比计算得到电机理论转速;
23、判断所述电机实际转速与所述参考转速是否相等,若否,则退出所述零扭矩控制状态。
24、根据本发明提供的技术方案,所述第二反电动势根据如下公式(一)计算:
25、
26、其中,ke表示所述第二反电动势,p表示所述电机极对数,n表示所述电机实际转速,ψf表示电机磁链。
27、本发明第二方面提供一种零扭矩控制系统,包括:
28、接收模块,所述接收模块配置用于实时接收扭矩指令,所述扭矩指令至少包括请求扭矩值;
29、状态切换模块,所述状态切换模块配置用于判断所述请求扭矩值为零且维持设定时长时,则进入零扭矩控制状态且控制电机输出零扭矩;
30、处理模块,所述处理模块配置用于在所述零扭矩控制状态下,获取参考电动势并判断所述参考反电动势大于母线电压时,获取补偿扭矩并控制电机输出所述补偿扭矩,以进行扭矩补偿。
31、本发明第三方面提供一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的零扭矩控制方法的步骤。
32、本发明第四方面提供一种计算机可读存储介质,所述计算机可读存储介质有计算机程序,所述计算机程序被处理器执行时实现如上所述的零扭矩控制方法的步骤。
33、与现有技术相比,本发明的有益效果在于:通过实时获取扭矩指令,并以请求扭矩值为零且持续设定时长作为零扭矩控制状态的切换信号,使得可准确控制车辆进入零扭矩状态;通过在零扭矩控制状态下获取参考反电动势,并且在参考反电动势大于母线电压时,通过获取补偿扭矩并控制电机输出补偿扭矩,使得可在零扭矩控制状态下对电机扭矩进行补偿,保证作用在车轮上的扭矩稳定在0n·m;同时防止由于参考反电动势大于母线电压时电机动能通过被动整流泄放产生具有制动效果的非预期力矩,避免影响车辆在零扭矩控制状态下进行移动。
技术特征:
1.一种零扭矩控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的零扭矩控制方法,其特征在于,获取参考电动势包括如下步骤:
3.根据权利要求2所述的零扭矩控制方法,其特征在于,获取第二反电动势包括如下步骤:
4.根据权利要求3所述的零扭矩控制方法,其特征在于,所述获取补偿扭矩的方法包括如下步骤:
5.根据权利要求4所述的零扭矩控制方法,其特征在于,构建所述第一标定数据库的方法包括如下步骤:
6.根据权利要求5所述的零扭矩控制方法,其特征在于,在所述零扭矩控制状态下,还包括如下步骤:
7.根据权利要求6所述的零扭矩控制方法,其特征在于,所述第二反电动势根据如下公式(一)计算:
8.一种零扭矩控制系统,其特征在于,包括:
9.一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-7任意一项所述的零扭矩控制方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任意一项所述的零扭矩控制方法的步骤。
技术总结
本发明提供一种零扭矩控制方法、系统、设备及介质,其中方法包括如下步骤:实时接收扭矩指令,扭矩指令至少包括请求扭矩值;判断请求扭矩值为零且维持设定时长时,则进入零扭矩控制状态且控制电机输出零扭矩;在零扭矩控制状态下,获取参考电动势并判断参考反电动势大于母线电压时,获取补偿扭矩并控制电机输出补偿扭矩,以进行扭矩补偿。本发明提供的方法避免在零扭矩控制状态下的非预期扭矩输出,以反电动势作为回馈参数,实时调整零扭矩控制状态,实现零扭矩控制,从而降低能耗。
技术研发人员:王孝泓,刘宗成,何浩
受保护的技术使用者:重庆赛力斯新能源汽车设计院有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!