一种自动挪车装置及挪车方法
本发明涉及自动挪车设备领域,特别是涉及一种自动挪车装置及挪车方法。
背景技术:
1、随着人们生活水平的不断提高,私家车的数量越来越多,方便了人们出行的同时也产生了严重了“停车难”问题,部分车主由于没有车位通常会将车停在路边、消防通道等位置,交通堵塞以及阻碍消防车通行的问题屡见不鲜。
2、为解决车辆乱停乱放问题,各汽车工厂开始研发挪车装置,例如现有汽车工厂用vga自动泊车系统,其主要实现方式是通过一整块带有导向轮和起重装置的泊车装置,利用vga实现自动导向并进行精准停车,该装置的不足之处在于:一是体积比较大,其应用场所一般为大型停车场或汽车制造厂,能够对生产的汽车进行统一化停车管理以节约空间;二是该泊车系统对于使用场所要求严格,使用场所必须具有科学合理的布局结合复杂的控制系统才能实现其泊车功能。而在实际生活中复杂多样的停车场所以及寻常的操控系统下很难实现泊车功能。
3、有鉴于此,如何提供一种家用或能够公共使用的多场景泊车装置,是本领域人员亟需解决的技术问题。
技术实现思路
1、本发明的目的是提供一种自动挪车装置,以解决现有技术存在的问题。
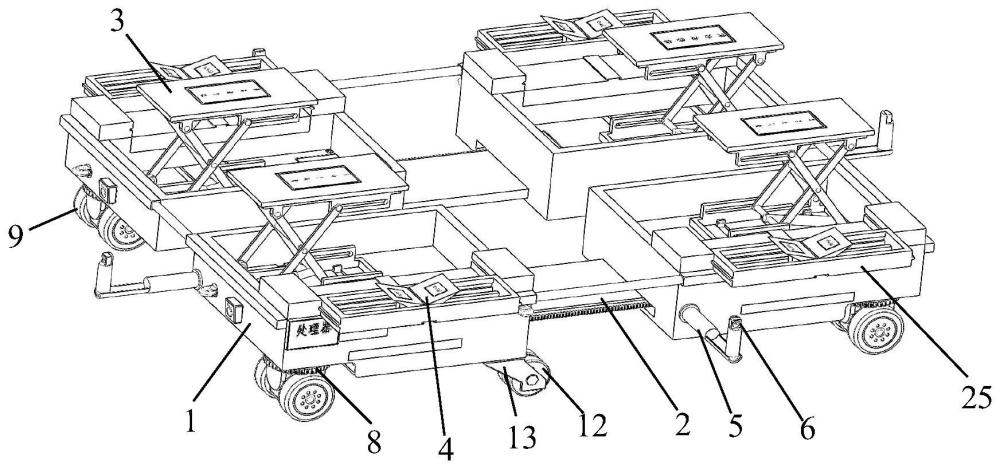
2、为实现上述目的,本发明提供了如下方案:本发明提供一种自动挪车装置,包括:
3、基座,所述基座有四个,相邻的所述基座之间通过可伸缩连接组件连接,所述基座的上表面向下凹陷形成容纳腔,所述基座的下表面设置有驱动机构;
4、液压升降平台,所述液压升降平台设置于所述基座内,所述液压升降平台能够从车辆的底部将车辆顶起;
5、夹紧机构,所述夹紧机构设置于所述基座内,所述夹紧机构能够在所述车辆顶起后对车轮进行定位和夹紧;
6、激光雷达探测组件,所述激光雷达探测组件设置于所述基座的外表面,所述激光雷达探测组件具有摄像头并能够探测车辆车宽和长度;
7、定位器,所述定位器设置于所述基座内;
8、处理器,所述处理器与所述液压升降平台、夹紧机构、定位器以及激光雷达探测组件电连接。
9、进一步的,所述驱动机构包括:
10、转向机构,所述转向机构设置于所述基座下表面,所述转向机构与舵轮传动连接且所述舵轮设置于所述转向机构下方;
11、第一电机和差速器,所述第一电机和差速器能够驱动所述舵轮转动,所述第一电机、所述差速器和所述转向机构与所述处理器通信连接;
12、万向轮,所述万向轮通过第一固定组件设置于所述基座下表面。
13、进一步的,所述驱动机构包括:
14、麦克纳姆轮,所述麦克纳姆轮通过第二固定组件设置于所述基座下表面;
15、第二电机和联轴器,所述第二电机通过联轴器与所述麦克纳姆轮传动连接,所述第二电机通过第三固定组件设置于所述基座下表面,所述第二电机的输出端上设置有转速传感器,所述第二电机和所述转速传感器与所述处理器通信连接。
16、进一步的,还包括:第一滑轨,所述第一滑轨设置于所述基座内,所述液压升降平台的下表面与所述第一滑轨滑动连接。
17、进一步的,所述可伸缩连接组件包括:
18、连接板,所述连接板通过齿条与相邻的两个基座内的齿轮连接,所述基座内设置驱动电机并能够通过齿轮带动所述连接板插入所述基座内,所述连接板插入基座后位于所述容纳腔下方。
19、进一步的,所述基座上的外表面设置有光伏板,所述基座内设置有光伏电池和接电插头,所述光伏电池与所述光伏板电连接,所述光伏电池及所述接电插头与所述可伸缩连接组件、所述液压升降平台、所述夹紧机构、所述激光雷达探测组件、所述处理器和所述互联装置电连接。
20、进一步的,所述夹紧机构包括:
21、夹紧组件,所述夹紧组件上设置有位置传感器;
22、双轴移动机构,所述夹紧组件设置于所述双轴移动机构上,所述双轴移动机构设置于所述基座内并能够带动所述夹紧组件沿竖直和水平方向移动。
23、进一步的,所述液压升降平台上设置有重力传感器。
24、本发明还提供一种自动挪车方法,使用权利要求1-8任一项所述的自动挪车装置,包括以下步骤:
25、s1:启动驱动机构,将自动挪车装置移动至车辆附近,通过激光雷达探测组件和摄像头对车辆进行全方位拍照并测量车辆的车宽和长度,寻找能够容纳车辆的车位;
26、s2:找到车位后对车位进行标记并通过摄像头进行录像;
27、s3:自动挪车装置返回车辆附近,进入车辆底部;
28、s4:可伸缩连接组件展开,通过激光雷达探测组件和摄像头监测基座位置并将四个基座向车辆的四个车轮方向移动直至所述基座靠近车辆的车轮;启动液压升降平台,将车辆向上抬升离地,启动双轴移动机构,夹紧组件通过位置传感器感应车轮位置并移动至车轮下方对车轮进行夹紧;
29、s5:启动驱动机构,自动挪车装置带动车辆,通过激光雷达探测组件和摄像头移动至标记车位内;
30、s6:夹紧组件放松车轮并复位至基座内,液压升降平台下降,将车辆向下降落至底面,可伸缩连接组件收缩,自动挪车装置从车辆底部移动至车辆外部,完成挪车。
31、进一步的,在步骤s4中,启动液压升降平台将车辆向上抬升离地的过程中通过液压升降平台上的重力传感器对车辆重力进行感应,当车辆重力超过所述液压升降平台的最大载荷时停止挪车。
32、本发明公开了以下技术效果:
33、1、本申请通过基座作为各部件的载体并通过可伸缩连接组件连接相邻的基座,能够实现挪车装置整体的展开与收缩,大大降低了挪车装置的体积。挪车装置通过液压升降平台对车辆进行顶升,通过夹紧机构对车轮进行夹紧,通过激光雷达探测组件对车辆尺寸信息提取以及挪车视野辅助,各机构协同作用共同实现了挪车操作,操作简便,解决了车辆乱停乱放的问题。
34、2、驱动机构采用舵轮或麦克纳姆轮作为车轮,可以轻松实现挪动装置原地转向以及各个方向的移动,提高挪车便捷性。
35、3、基座设置光伏组件和接电插头,可通过太阳能发电为各机构供电也可以采用外接电源的方式送电,灵活度较高。
36、4、液压升降平台表面设置重力传感器,可对待挪车车辆的重力进行检测,避免车辆过重超出液压升降平台的最大载荷,造成设备损坏。
技术特征:
1.一种自动挪车装置,其特征在于,包括:
2.根据权利要求1所述的一种自动挪车装置,其特征在于,所述驱动机构包括:
3.根据权利要求1所述的一种自动挪车装置,其特征在于,所述驱动机构包括:
4.根据权利要求1所述的一种自动挪车装置,其特征在于,还包括:第一滑轨(20),所述第一滑轨(20)设置于所述基座(1)内,所述液压升降平台(3)的下表面与所述第一滑轨(20)滑动连接。
5.根据权利要求1所述的一种自动挪车装置,其特征在于,所述可伸缩连接组件(2)包括:
6.根据权利要求1所述的一种自动挪车装置,其特征在于,所述基座(1)上的外表面设置有光伏板(21),所述基座(1)内设置有光伏电池(22)和接电插头(23),所述光伏电池(22)与所述光伏板(21)电连接,所述光伏电池(22)及所述接电插头(23)与所述可伸缩连接组件(2)、所述液压升降平台(3)、所述夹紧机构、所述激光雷达探测组件(5)、所述处理器和所述互联装置电连接。
7.根据权利要求1所述的一种自动挪车装置,其特征在于,所述夹紧机构包括:
8.根据权利要求1所述的一种自动挪车装置,其特征在于,所述液压升降平台(3)上设置有重力传感器(26)。
9.一种自动挪车方法,其特征在于,使用权利要求1-8任一项所述的自动挪车装置,包括以下步骤:
10.根据权利要求9所述的一种自动挪车方法,其特征在于,在步骤s4中,启动液压升降平台(3)将车辆向上抬升离地的过程中通过液压升降平台(3)上的重力传感器(26)对车辆重力进行感应,当车辆重力超过所述液压升降平台(3)的最大载荷时停止挪车。
技术总结
本发明公开一种自动挪车装置及挪车方法,涉及自动挪车设备领域,包括:基座,相邻的基座之间通过可伸缩连接组件连接,基座的下表面设置有驱动机构,液压升降平台能够从车辆的底部将车辆顶起,夹紧机构能够在车辆顶起后对车轮进行定位和夹紧,激光雷达探测组件具有摄像头并能够探测车辆车宽和长度。通过基座作为各部件的载体并通过可伸缩连接组件连接相邻的基座,能够实现挪车装置整体的展开与收缩,大大降低了挪车装置的体积。挪车装置通过液压升降平台对车辆进行顶升,通过夹紧机构对车轮进行夹紧,通过激光雷达探测组件对车辆尺寸信息提取以及挪车视野辅助,各机构协同作用共同实现了挪车操作,操作简便,解决了车辆乱停乱放的问题。
技术研发人员:宋占锋,刘春东,肖龙,孙志刚,李珠倩,王嘉鑫,赵建军,艾丽莎
受保护的技术使用者:河北建筑工程学院
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!