确定折叠角的方法、装置、电子设备及存储介质与流程
本技术涉及自动驾驶技术,尤其涉及一种确定折叠角的方法、装置、电子设备及存储介质。
背景技术:
1、一个典型的满载半挂车拖车由牵引车和挂车组成,它们在铰接点(牵引销/鞍座位置)连接。这种拖挂车组合的折叠角是一个重要的信号,尤其是对于今天的自动驾驶和高级驾驶辅助功能。目前测量折叠角的方法,主要有如下两种:
2、第一种直接测量折叠角的方法是,在牵引车和挂车连接的地方安装一个测量装置,然后使用旋转编码器获得角度。这种方法的优点是测量精度高,而且在各种条件下都可用;缺点是需要额外安装新的设备,增加了成本。
3、另一种估计挂车位置的方法是,使用感知传感器(安装在牵引车上,例如摄像头、雷达或激光雷达)观察挂车,然后根据传感器收集到的数据计算出挂车相对于牵引车的位置,从而得到折叠角。这种方法的优点是可以使用已经安装在牵引车上的传感器,不需要额外安装新的设备;缺点是对于每个新连接的挂车,都需要进行校准工作,而且估计精度有时较低。
技术实现思路
1、本技术提供一种确定折叠角的方法、装置、电子设备及存储介质,用以解决现有技术中测量拖挂车的折叠角需要额外安装新的设备,或者对于新连接的挂车需要进行校准的问题,实现了不需要在牵引车和挂车之间安装额外的传感器或设备,且避免每次连接新挂车都需要进行校准工作的技术效果。
2、一方面,本技术提供一种确定折叠角的方法,所述方法包括:
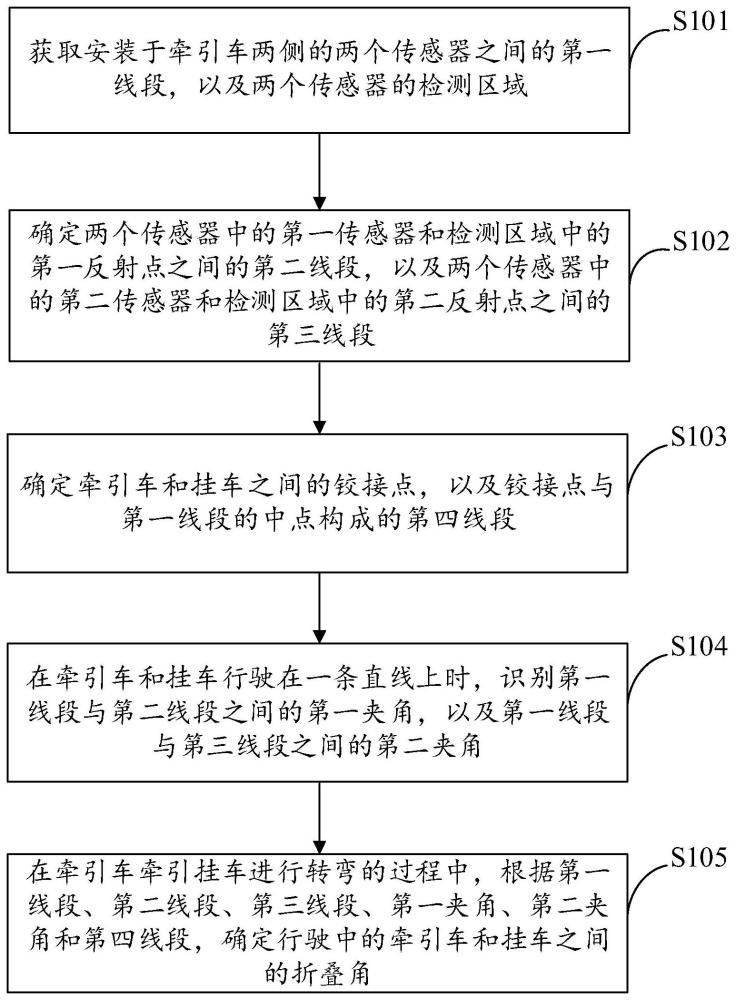
3、获取安装于牵引车两侧的两个传感器之间的第一线段,以及挂车上与所述两个传感器对应的检测区域;
4、确定所述两个传感器中的第一传感器和所述检测区域中的第一反射点之间的第二线段,以及所述两个传感器中的第二传感器和所述检测区域中的第二反射点之间的第三线段;
5、确定所述牵引车和所述挂车之间的铰接点,以及所述铰接点与所述第一线段的中点构成的第四线段;
6、在所述牵引车和所述挂车行驶在一条直线上时,识别所述第一线段与所述第二线段之间的第一夹角,以及所述第一线段与所述第三线段之间的第二夹角;
7、在所述牵引车牵引所述挂车进行转弯的过程中,根据所述第一线段、所述第二线段、所述第三线段、所述第一夹角、所述第二夹角和所述第四线段,确定转弯行驶中的牵引车和挂车之间的折叠角。
8、一种可选的实施方式,根据所述第一线段、所述第二线段、所述第三线段、所述第一夹角、所述第二夹角和所述第四线段,确定转弯行驶中的牵引车和挂车之间的折叠角包括:
9、根据所述第一线段、所述第二线段、所述第三线段、所述第一夹角、所述第二夹角,确定所述第一反射点和所述第二反射点之间的第五线段,其中,所述第五线段还用于表征所述挂车的宽度;
10、根据所述第一线段、第四线段、所述第五线段和变动后的第一反射点,确定转弯行驶中的所述牵引车和所述挂车之间的折叠角。
11、一种可选的实施方式,根据所述第一线段、第四线段、所述第五线段和变动后的第一反射点,确定转弯行驶中的所述牵引车和所述挂车之间的折叠角,包括:
12、根据所述第四线段、所述第五线段,确定所述变动后的第一反射点与所述铰接点之间的第六线段;
13、根据所述第五线段和所述第六线段,计算得到在所述牵引车和所述挂车行驶在一条直线上时的初始夹角;
14、在所述牵引车牵引所述挂车进行转弯的过程中,根据所述第一线段的中点、所述变动后的第一反射点、所述铰接点、变动后的第五线段的中点、变动后的第一夹角,计算所述牵引车牵引所述挂车进行转弯时的当前夹角;
15、根据所述当前夹角和所述初始夹角,确定所述折叠角。
16、一种可选的实施方式,所述牵引车和所述挂车之间的折叠角,用于表征所述牵引车牵引所述挂车的转弯角度;
17、当所述牵引车牵引所述挂车向左或向右转弯时,所述折叠角对应为正值或负值。
18、另一方面,本技术提供一种确定折叠角的装置,所述装置包括:
19、获取模块,用于获取安装于牵引车两侧的两个传感器之间的第一线段,以及挂车上与所述两个传感器对应的检测区域;
20、第一确定模块,用于确定所述两个传感器中的第一传感器和所述检测区域中的第一反射点之间的第二线段,以及所述两个传感器中的第二传感器和所述检测区域中的第二反射点之间的第三线段;
21、第二确定模块,用于确定所述牵引车和所述挂车之间的铰接点,以及所述铰接点与所述第一线段的中点构成的第四线段;
22、识别模块,用于在所述牵引车和所述挂车行驶在一条直线上时,识别所述第一线段与所述第二线段之间的第一夹角,以及所述第一线段与所述第三线段之间的第二夹角;
23、第三确定模块,用于在所述牵引车牵引所述挂车进行转弯的过程中,根据所述第一线段、所述第二线段、所述第三线段、所述第一夹角、所述第二夹角和所述第四线段,确定转弯行驶中的牵引车和挂车之间的折叠角。
24、一种可选的实施方式,所述第三确定模块,包括:
25、第一确定单元,用于根据所述第一线段、所述第二线段、所述第三线段、所述第一夹角、所述第二夹角,确定所述第一反射点和所述第二反射点之间的第五线段,其中,所述第五线段还用于表征所述挂车的宽度;
26、第二确定单元,用于根据所述第一线段、第四线段、所述第五线段和变动后的第一反射点,确定转弯行驶中的所述牵引车和所述挂车之间的折叠角。
27、一种可选的实施方式,所述第二确定单元,包括:
28、第一确定子单元,用于根据所述第四线段、所述第五线段,确定所述变动后的第一反射点与所述铰接点之间的第六线段;
29、第一计算子单元,用于根据所述第五线段和所述第六线段,计算得到在所述牵引车和所述挂车行驶在一条直线上时的初始夹角;
30、第二计算子单元,用于根据所述第五线段和所述第六线段,计算得到在所述牵引车和所述挂车行驶在一条直线上时的初始夹角;
31、第三计算子单元,用于在所述牵引车牵引所述挂车进行转弯的过程中,根据所述第一线段的中点、所述变动后的第一反射点、所述铰接点、变动后的第五线段的中点、变动后的第一夹角,计算所述牵引车牵引所述挂车进行转弯时的当前夹角;
32、第二确定子单元,用于根据所述当前夹角和所述初始夹角,确定所述折叠角。
33、另一方面,本技术提供一种电子设备,包括:处理器,以及与所述处理器连接的存储器;所述存储器存储计算机执行指令;所述处理器执行所述存储器存储的计算机执行指令,以实现如任一项所述的方法。
34、另一方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如任一项所述的方法。
35、另一方面,本技术提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现任一项所述的方法。
36、本技术提供的确定折叠角的方法、装置、电子设备及存储介质。该方法包括:获取安装于牵引车两侧的两个传感器之间的第一线段,以及挂车上与上述两个传感器对应的检测区域;确定两个传感器中的第一传感器和检测区域中的第一反射点之间的第二线段,以及两个传感器中的第二传感器和检测区域中的第二反射点之间的第三线段;确定牵引车和挂车之间的铰接点,以及铰接点与第一线段的中点构成的第四线段;在牵引车和挂车行驶在一条直线上时,识别第一线段与第二线段之间的第一夹角,以及第一线段与第三线段之间的第二夹角;在牵引车牵引挂车进行转弯的过程中,根据第一线段、第二线段、第三线段、第一夹角、第二夹角和第四线段,确定转弯行驶中的牵引车和挂车之间的折叠角。
37、本技术的两个感知传感器安装在牵引车的两侧,可以看到挂车的前沿,这样可以避免单个传感器视野被遮挡或失效的情况,提高了检测的可靠性。另外,还可以根据传感器检测到的挂车前沿的距离和宽度,计算出挂车相对于牵引车的位置,从而得到车头牵引挂车进行转弯的过程中的折叠角。这样可以避免每次连接新挂车都需要进行校准工作,提高了效率。
38、采用本技术方法,可以解决现有技术中测量拖挂车的折叠角需额外配备、安装新的设备,或者对于新连接的挂车需要进行校准的问题,实现了不需要在牵引车和挂车之间安装额外的传感器或设备,且避免每次连接新挂车都需要进行校准工作的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!