一种高级辅助驾驶系统的制作方法
本发明涉及一种高级辅助驾驶系统。
背景技术:
1、随着汽车的智能化发展,越来越多的车辆都具有了辅助驾驶功能,辅助驾驶功能的安全性也越来越受到重视,紧急制动、车道偏离抑制、车道居中控制、自适应巡航等主动安全功能越来越多的被应用。
2、当前通常使用雷达及视频作为主要的探测传感器。雷达探测的数据准确度高,探测距离远,漏检率低,对目标物体的速度信息获取准确。缺点是不能分辨目标物体的种类,如果单独使用容易触发不必要的报警或制动。视频检测的优点是能够分辨出目标物体的种类,系统可以根据不同类型的目标采取相应的动作,但视频对天气、光照要求严格,在条件不好的时候会漏检,并且识别距离不如雷达。因此现有技术一般是将雷达和视频结合,再通过融合算法,准确识别目标物体的种类、速度、大小、距离,再由系统执行相应的动作。
3、在现有技术方案中,由于自动紧急制动系统、双预警系统(车道偏离预警、前向碰撞预警)、车道偏离抑制、车道居中控制和自适应巡航系统工作原理不同,对控制器及雷达、摄像头等传感器的要求不同,通常独立使用。造成了整车成本增加较多,传感器重复安装等问题。
技术实现思路
1、本发明要解决的技术问题是:解决现有技术方案中,系统功能集成度不高,成本高,传感器重复安装等问题。
2、为达到上述目的,本发明是通过以下技术方案实现的:
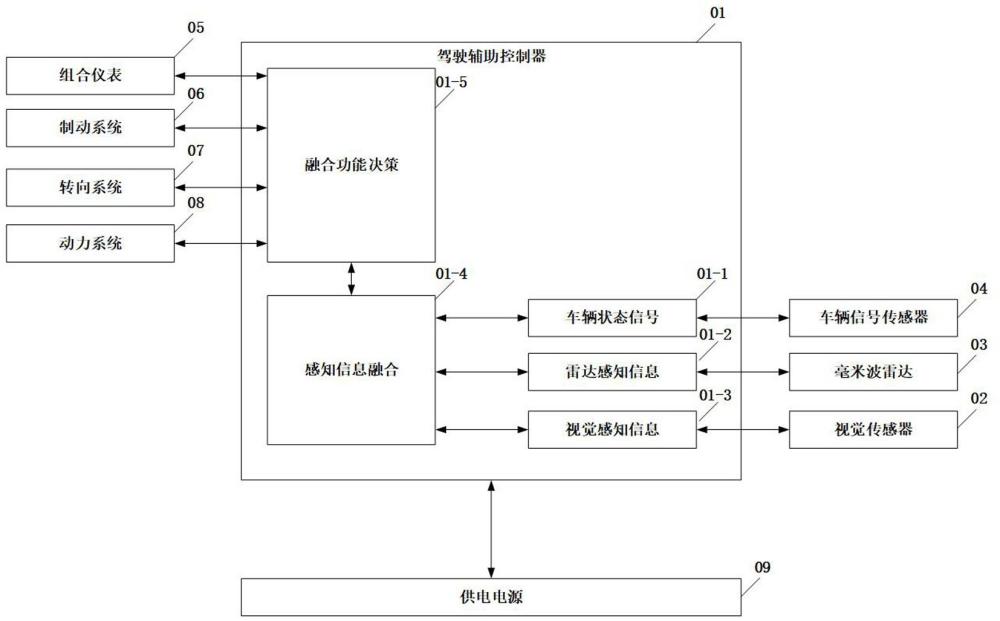
3、一种高级辅助驾驶系统,包括驾驶辅助控制器以及与驾驶辅助控制器相连接的视觉传感器、毫米波雷达、车辆信号传感器、组合仪表、制动系统、转向系统、动力系统和供电电源;
4、其中,在驾驶辅助控制器内实现高级辅助驾驶控制方法,包括如下步骤:
5、第一步:驾驶辅助控制器对获取的整车状态信号、雷达感知信息、视觉感知信息进行感知信息融合,获得用于功能决策的条件;
6、第一步包括如下步骤
7、步骤1.1:视觉传感器和毫米波雷达将采集到的视觉感知信息或者雷达感知信息传送至驾驶辅助控制器;
8、步骤1.2:驾驶辅助控制器根据视觉传感器采集到的视觉感知信息,获得该对象的位置坐标和速度信息;同时,驾驶辅助控制器根据毫米波雷达的雷达感知信息,也获得同一对象的位置坐标和速度信息;
9、步骤1.3:驾驶辅助控制器对获取的同一对象的两套位置坐标和速度信息进行相似度关联匹配,将匹配成功后的雷达、视觉两种目标的坐标位置、速度各取一定权重后形成新的融合目标;
10、第二步:驾驶辅助控制器对融合后的感知信息进行处理和分析,并进行融合功能决策;
11、第三步:根据融合功能决策,向组合仪表、制动系统、转向系统、动力系统发出控制指令。
12、第二步中,驾驶辅助控制器实时计算前方最近危险目标的预碰撞时间ttc,当预碰撞时间ttc小于某阈值时,系统将会触发自动紧急制动决策。
13、视觉传感器安装在车辆的前挡风玻璃上,用于识别车辆前方的物料类别、大小、距离、移动速度、移动方向。
14、驾驶辅助控制器和视觉传感器在物理形态上是一个整体。
15、毫米波雷达安装在车辆最前端无金属遮挡的地方,用于识别车辆前方的物体大小、距离、移动速度、移动方向。
16、供电电源来自整车kl15电源。
17、与现有技术相比,本发明具有以下几方面的优点:本发明在功能上集成了高级紧急制动功能、车道偏离预警功能、前向碰撞预警功能、车道偏离抑制功能、车道居中控制功能和自适应巡航功能,功能集成度高。
技术特征:
1.一种高级辅助驾驶系统,其特征在于:包括驾驶辅助控制器(01)以及与驾驶辅助控制器(01)相连接的视觉传感器(02)、毫米波雷达(03)、车辆信号传感器(04)、组合仪表(05)、制动系统(06)、转向系统(07)、动力系统(08)和供电电源(09);
2.根据权利要求1所述的一种高级辅助驾驶系统,其特征在于:第二步中,驾驶辅助控制器(01)实时计算前方最近危险目标的预碰撞时间ttc,当预碰撞时间ttc小于某阈值时,系统将会触发自动紧急制动决策。
3.根据权利要求1所述的一种高级辅助驾驶系统,其特征在于:视觉传感器(02)安装在车辆的前挡风玻璃上,用于识别车辆前方的物料类别、大小、距离、移动速度、移动方向。
4.根据权利要求1所述的一种高级辅助驾驶系统,其特征在于:驾驶辅助控制器(01)和视觉传感器(02)在物理形态上是一个整体。
5.根据权利要求1所述的一种高级辅助驾驶系统,其特征在于:毫米波雷达(03)安装在车辆最前端无金属遮挡的地方,用于识别车辆前方的物体大小、距离、移动速度、移动方向。
6.根据权利要求1所述的一种高级辅助驾驶系统,其特征在于:供电电源(09)来自整车kl15电源。
技术总结
一种高级辅助驾驶系统,包括驾驶辅助控制器以及视觉传感器、毫米波雷达、车辆信号传感器、组合仪表、制动系统、转向系统、动力系统和供电电源;在驾驶辅助控制器内实现高级辅助驾驶控制方法,第一步:驾驶辅助控制器对获取的整车状态信号、雷达感知信息、视觉感知信息进行感知信息融合,获得用于功能决策的条件;第二步:驾驶辅助控制器对融合后的感知信息进行处理和分析,并进行融合功能决策;第三步:根据融合功能决策,向组合仪表、制动系统、转向系统、动力系统发出控制指令。本发明在功能上集成了高级紧急制动功能、车道偏离预警功能、前向碰撞预警功能、车道偏离抑制功能、车道居中控制功能和自适应巡航功能,功能集成度高。
技术研发人员:吕培科,杨建崇,闫文科,崔超超
受保护的技术使用者:郑州精益达汽车零部件有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!