一种基于车载传感器的车辆状态监测方法与流程
本发明属于车辆控制,具体涉及一种基于车载传感器的车辆状态监测方法。
背景技术:
1、传感器在汽车电子系统中占据着重要地位,应用传感器可以提升汽车的智能化与自动化水平。汽车的智能化与自动化离不开在汽车运行过程中使用车载传感器对车辆运行状态进行实时监测。
2、在车载传感器中陀螺仪和加速度计为最常见的传感器,加速度计只能侦测物体的移动行为,并不具备精确侦测物体角度改变的能力,而陀螺仪可以侦测物体水平改变的状态,但无法计算物体移动的激烈程度。将加速度计和陀螺仪的结合使用可以对车辆的运动姿态信息进行准确的把控。
3、但是在现有技术中,通常将陀螺仪和加速度计持续工作,这对汽车带来了额外的续航负担。同时,对能耗数据和传感器数据的处理也将影响到车辆状态监测的准确性。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种基于车载传感器的车辆状态监测方法,包括以下步骤:
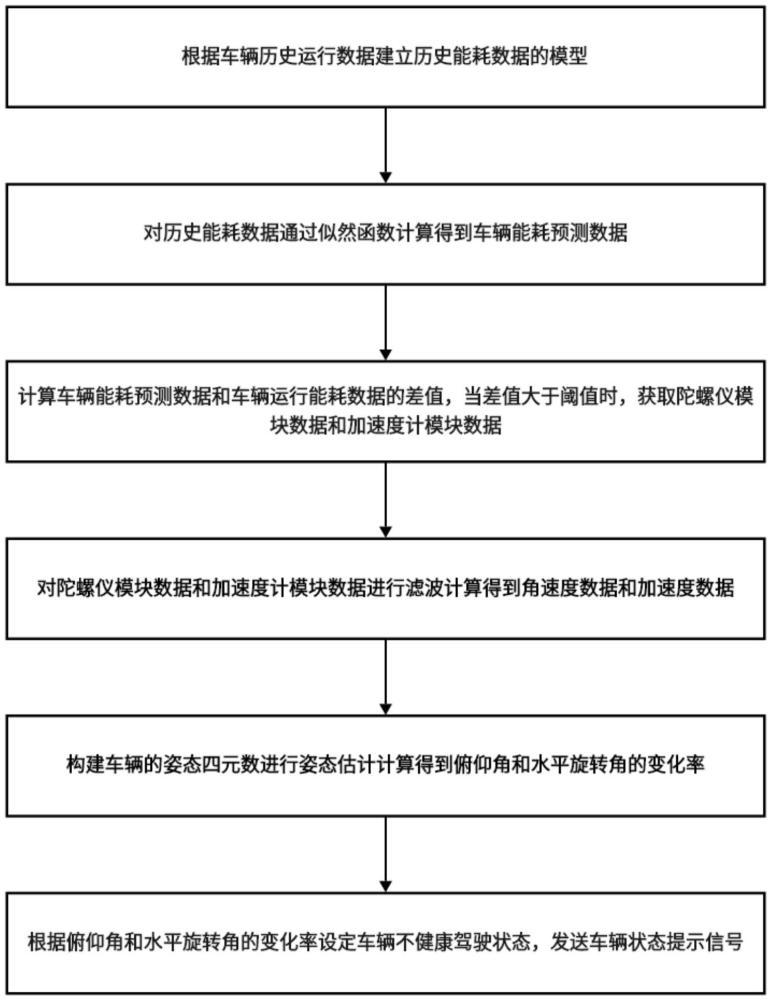
2、s1:获取车辆的历史运行数据,根据所述历史运行数据建立车辆的历史能耗数据的模型其中,λ0表示所述车辆的固有能耗系数,σ为所述历史运行数据的残差,k=1、2或3时,λk分别表示所述车辆的行驶能耗系数、制动能耗系数和车机系统能耗系数,ik分别表示所述车辆的行驶能耗强度、制动能耗强度和车机系统能耗强度;
3、s2:对所述历史能耗数据通过似然函数计算得到所述历史能耗数据的车辆能耗预测数据;
4、s3:获取车辆运行能耗数据,计算所述车辆能耗预测数据和所述车辆运行能耗数据的差值,当所述差值大于预设的阈值时对车辆状态监控模块发送数据获取信号,得到陀螺仪模块数据和加速度计模块数据;
5、s4:对所述陀螺仪模块数据和所述加速度计模块数据进行滤波计算得到角速度数据和加速度数据;
6、s5:根据所述角速度数据和所述加速度数据构建所述车辆在t时刻的姿态四元数at[a0(t),a1(t),a2(t),a3(t)],其中,a0为标量,a1和a2为根据所述角速度数据中的角度量计算的特征向量,a3为根据所述加速度数据得到的特征向量,对所述姿态四元数进行姿态估计计算得到所述车辆的俯仰角变化率和水平旋转角变化率;
7、s6:将超过设定的阈值的俯仰角变化率和水平旋转角变化率标记为车辆不健康驾驶状态,根据所述车辆运行能耗数据和所述车辆不健康驾驶状态发送车辆状态提示信号。
8、具体地,s1中的固有能耗系数、行驶能耗系数、制动能耗系数和车机系统能耗系数为根据所述车辆预先设定的参数,所述行驶能耗强度、制动能耗强度和车机系统能耗强度的计算公式为:
9、
10、其中,i表示所述历史运行数据,n为所述历史运行数据的数量,v(i)为历史行驶速度,ts为所述历史运行数据的采样时间宽度,δt表示所述历史运行数据中车内温度变化量的统计期望值。
11、具体地,s2具体包括:
12、s201:计算所述历史运行数据的先验分布的初始值,计算公式为:
13、
14、其中,和分别对应于所述固有能耗系数、所述行驶能耗系数、所述制动能耗系数和所述车机系统能耗系数的先验分布初始值,m为所述车辆的重量,g为重力加速度,f0为所述车辆的固有摩擦系数,η为所述车辆的平均传动效率,ρ为空气密度,res为空气阻力系数,s为所述车辆的迎风面积,ηrec为所述车辆的传动回收效率,pc/h为所述车辆的制热/制冷功率,pall为所述车辆其余附件的功率总和,和分别为所述固有能耗强度、所述行驶能耗强度、所述制动能耗强度和所述车机系统能耗强度的基准值;
15、s202:根据所述初始值对先验分布进行区间限制,得到所述先验分布的限制区间
16、s203:根据所述限制区间得到满足所述限制区间的似然函数:其中,ξ为标准差,为单位矩阵,表示正态分布;
17、s204:根据所述似然函数计算所述历史能耗数据的后验分布p(e|y,i,e)=∫p(e|λ-i,ξ2)p(λ|i-e,ξ2)dβ,根据所述后验分布得到所述车辆能耗预测数据。
18、具体地,s4中的滤波计算的方法包括:
19、s401:计算t时刻误差矩阵pt=apt-1at+q,其中a为陀螺仪模块和加速度计模块的系统状态转移矩阵;
20、s402:根据所述误差矩阵计算t时刻的修正矩阵kt=ptht(hptht+r)-1,其中,h为所述陀螺仪模块和所述加速度计模块的观测矩阵、r为所述陀螺仪模块和所述加速度计模块的测量噪声的协方差矩阵;
21、s403:根据所述修正矩阵对所述陀螺仪模块数据和所述加速度计模块数据进行得到所述角速度数据和所述加速度数据,计算公式为:
22、
23、其中,为所述角速度数据和所述加速度数据,xt为所述角速度数据和所述加速度数据的测量值,zt为所述陀螺仪模块和加速度计模块在t时刻的系统状态。
24、进一步地,s401中的误差矩阵通过t-1时刻的误差矩阵通过pt=(1-hkt)pt-1方法迭代获得。
25、具体地,s5中的姿态估计计算的具体方法包括:
26、s501:对所述姿态四元数转化为离散形式:
27、
28、其中,δt为积分步长;
29、s502:对所述离散形式进行估计计算得到俯仰角数据和水平旋转角数据。
30、本发明的有益效果为:
31、(1)通过车辆历史数据对车辆的能耗情况进行预测,将预测的结果和车辆实际的运行能耗数据进行比对,当实际的运行能耗数据与预测的结果相差超过阈值时,获取传感器的数据对车辆状态进行分析。实现了对车辆能耗异常情况的及时监测,同时节约了对传感器数据分析处理带来的额外能耗;
32、(2)通过对陀螺仪模块数据和加速度计模块数据进行滤波计算,提高了车辆状态分析的准确性。
技术特征:
1.一种基于车载传感器的车辆状态监测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述s1中的固有能耗系数、行驶能耗系数、制动能耗系数和车机系统能耗系数为根据所述车辆预先设定的参数,所述行驶能耗强度、制动能耗强度和车机系统能耗强度的计算公式为:
3.根据权利要求2所述的方法,其特征在于,所述s2具体包括:
4.根据权利要求1所述的方法,其特征在于,所述s4中的滤波计算的方法包括:
5.根据权利要求4所述的方法,其特征在于,所述s401中的误差矩阵通过t-1时刻的误差矩阵通过pt=(1-hkt)pt-1方法迭代获得。
6.根据权利要求1所述的方法,其特征在于,所述s5中的姿态估计计算的具体方法包括:
技术总结
本发明涉及一种基于车载传感器的车辆状态监测方法,属于车辆控制技术领域。其中,该方法包括:根据车辆历史运行数据建立历史能耗数据的模型,对历史能耗数据通过似然函数计算得到车辆能耗预测数据。计算车辆能耗预测数据和车辆运行能耗数据的差值,当差值大于阈值时,获取陀螺仪模块数据和加速度计模块数据。对陀螺仪模块数据和加速度计模块数据进行滤波计算得到角速度数据和加速度数据。构建车辆的姿态四元数进行姿态估计计算得到俯仰角和水平旋转角的变化率。根据俯仰角和水平旋转角的变化率设定车辆不健康驾驶状态,发送车辆状态提示信号。实现了对车辆能耗异常情况的及时监测,同时节约了传感器带来的额外能耗,提高了车辆状态分析的准确性。
技术研发人员:牛金慧,罗夕林,戴永刚
受保护的技术使用者:上海朗尚传感技术有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!