一种车辆行驶辅助系统、车辆行驶辅助方法、设备及介质与流程
本技术涉及智能汽车,尤其是涉及一种车辆行驶辅助系统、车辆行驶辅助方法、设备及介质。
背景技术:
1、在日常驾车时,通常会遇到下述情况:汽车在没有交通指示灯的十字路口、t字路口转弯或从匝道并入其它车道时,由于车身切入路线与车道形成角度,后视镜无法观测到侧后方车道情况。上述情况中由于驾驶员视线不良,很可能造成交通事故。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种车辆行驶辅助系统、车辆行驶辅助方法、设备及介质,车辆右转时,安装在车辆左前方的第一拍摄模块逆时针转动指定角度,以补偿车辆左侧后视镜观察不到的方位情况;车辆左转时,安装在车辆右前方的第二拍摄模块顺时针转动,以补偿车辆左侧后视镜观察不到的方位情况,为驾驶员在驾驶车辆通过路口时提供辅助,提高驾驶安全性。
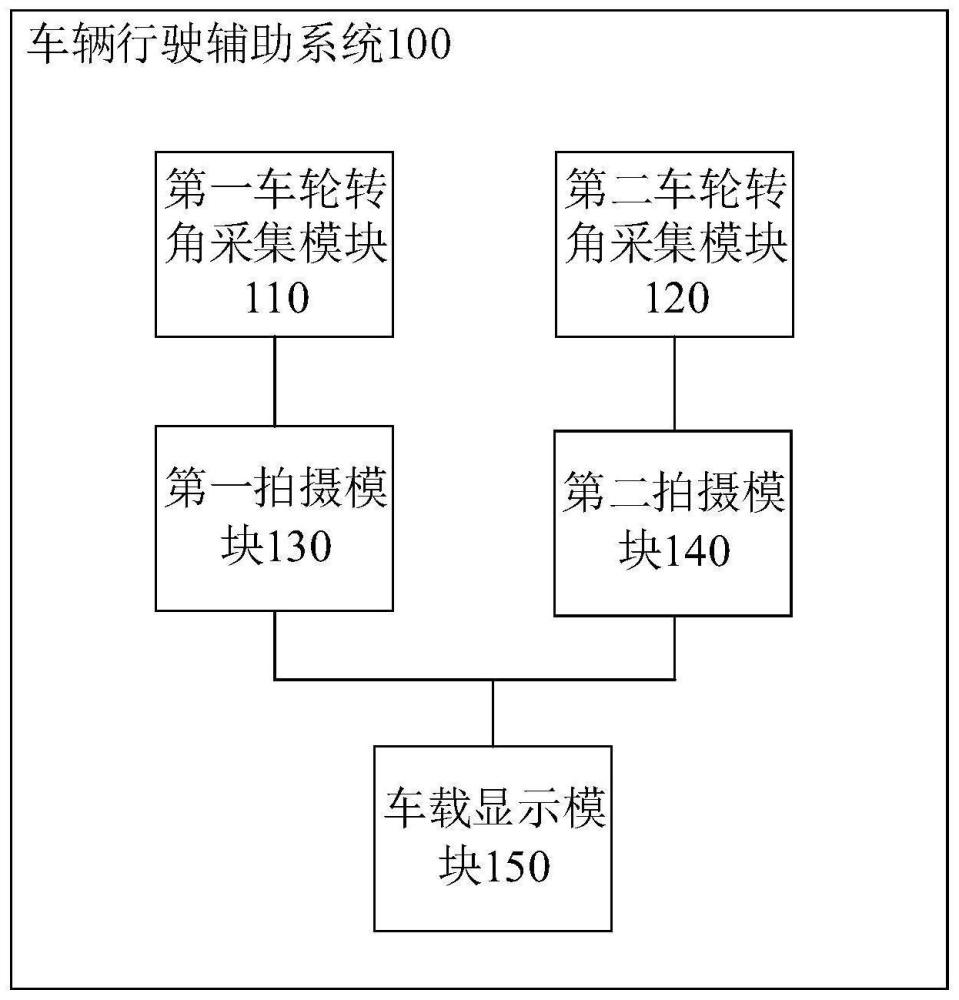
2、第一方面,本技术实施例提供了一种车辆行驶辅助系统,所述车辆行驶辅助系统安装在车辆上,所述车辆行驶辅助系统包括:安装在所述车辆的左前轮处的第一车轮转角采集模块、安装在所述车辆的右前轮处的第二车轮转角采集模块、安装在所述车辆左前方的第一拍摄模块、安装在所述车辆右前方的第二拍摄模块和车载显示模块,其中,所述第一车轮转角采集模块与所述第一拍摄模块通信连接,所述第二车轮转角采集模块与所述第二拍摄模块通信连接,所述第一拍摄模块和所述第二拍摄模块分别与所述车载显示模块通信连接;
3、所述第一车轮转角采集模块,用于当所述车辆右转时,采集所述车辆的左前轮的第一车轮旋转角度,并将所述第一车轮旋转角度发送至所述第一拍摄模块;
4、所述第一拍摄模块,用于基于所述第一车轮旋转角度进行逆时针旋转,采集所述车辆左后方的第一影像,并将所述第一影像发送至所述车载显示模块;
5、所述第二车轮转角采集模块,用于当所述车辆左转时,采集所述车辆的右前轮的第二车轮旋转角度,并将所述第二车轮旋转角度发送至所述第二拍摄模块;
6、所述第二拍摄模块,用于基于所述第二车轮旋转角度进行顺时针旋转,采集所述车辆右后方的第二影像,并将所述第二影像发送至所述车载显示模块;
7、所述车载显示模块,用于接收所述第一影像并进行显示,或者,接收所述第二影像并进行显示。
8、进一步的,所述第一车轮转角采集模块和所述第二车轮转角采集模块均包括滑片、变阻线圈和信号发射单元,其中,当车轮转动时,所述滑片绕车轮转向轴转动并与所述变阻线圈接触,所述变阻线圈产生不同阻值;
9、所述信号发射单元,用于采集所述变阻线圈的当前阻值,利用阻值与角度之间的预设对应关系确定所述当前阻值对应的车轮旋转角度,并将所述车轮旋转角度发送至拍摄模块。
10、进一步的,所述第一拍摄模块和所述第二拍摄模块均包括信号接收单元、处理单元、电机、转动连接单元和摄像头,其中,所述电机与所述转动连接单元连接,所述摄像头安装在所述转动连接单元上;
11、所述信号接收单元,用于接收所述车轮旋转角度,并将所述车轮旋转角度发送至所述处理单元;
12、所述处理单元,用于基于所述车轮旋转角度生成旋转指令,以根据所述旋转指令控制所述电机工作,以带动所述转动连接单元上的所述摄像头转动;
13、所述摄像头,用于实时采集车辆周围影像,并将所述车辆周围影像发送至所述车载显示模块。
14、进一步的,所述第一拍摄模块和所述第二拍摄模块还均包括雷达采集单元,所述雷达采集单元安装在所述转动连接单元上;
15、所述雷达采集单元,用于实时采集所述车辆与障碍物之间的第一距离,并将所述第一距离发送至所述处理单元;
16、所述处理单元,还用于当判断所述第一距离小于或等于预设距离时,生成第一报警信息。
17、进一步的,所述第一拍摄模块和所述第二拍摄模块还均包括红外光源发射装置,所述红外光源发射装置安装在所述转动连接单元上;
18、所述红外光源发射装置,用于发射红外光束;
19、所述摄像头,还用于采集所述红外光束反射后的光线;
20、所述处理单元,还用于基于所述红外光源发射装置发射红外光束的时间,以及所述摄像头采集到所述红外光束反射后的光线的时间,计算所述车辆与障碍物之间的第二距离,当判断所述第二距离小于或等于预设距离时,生成第二报警信息。
21、进一步的,所述处理单元,还用于在所述车辆直行时,当基于所述车辆周围影像检测到移动物体时,基于所述车辆的前进轨迹和所述移动物体的前进轨迹预测出所述车辆与所述移动物体的交汇点,当判断所述车辆到达所述交汇点的第一时间与所述移动物体到达所述交汇点的第二时间之间的差值小于或等于时间阈值时,则生成第三报警信息。
22、第二方面,本技术实施例还提供了一种车辆行驶辅助方法,所述车辆行驶辅助方法应用于车辆行驶辅助系统,所述车辆行驶辅助系统安装在车辆上,所述车辆行驶辅助系统包括:安装在所述车辆的左前轮处的第一车轮转角采集模块、安装在所述车辆的右前轮处的第二车轮转角采集模块、安装在所述车辆左前方的第一拍摄模块、安装在所述车辆右前方的第二拍摄模块和车载显示模块,其中,所述第一车轮转角采集模块与所述第一拍摄模块通信连接,所述第二车轮转角采集模块与所述第二拍摄模块通信连接,所述第一拍摄模块和所述第二拍摄模块分别与所述车载显示模块通信连接;所述车辆行驶辅助方法包括:
23、当所述车辆右转时,所述第一车轮转角采集模块采集所述车辆的左前轮的第一车轮旋转角度,并将所述第一车轮旋转角度发送至所述第一拍摄模块;
24、所述第一拍摄模块基于所述第一车轮旋转角度进行逆时针旋转,采集所述车辆左后方的第一影像,并将所述第一影像发送至所述车载显示模块;
25、当所述车辆左转时所述第二车轮转角采集模块,采集所述车辆的右前轮的第二车轮旋转角度,并将所述第二车轮旋转角度发送至所述第二拍摄模块;
26、所述第二拍摄模块基于所述第二车轮旋转角度进行顺时针旋转,采集所述车辆右后方的第二影像,并将所述第二影像发送至所述车载显示模块;
27、所述车载显示模块接收所述第一影像并进行显示,或者,接收所述第二影像并进行显示。
28、进一步的,所述第一车轮转角采集模块和所述第二车轮转角采集模块均包括滑片、变阻线圈和信号发射单元,其中,当车轮转动时,所述滑片绕车轮转向轴转动并与所述变阻线圈接触,所述变阻线圈产生不同阻值;所述车辆行驶辅助方法还包括:
29、所述信号发射单元采集所述变阻线圈的当前阻值,利用阻值与角度之间的预设对应关系确定所述当前阻值对应的车轮旋转角度,并将所述车轮旋转角度发送至拍摄模块。
30、第三方面,本技术实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如上述的车辆行驶辅助方法的步骤。
31、第四方面,本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的车辆行驶辅助方法的步骤。
32、根据本技术提供的一种车辆行驶辅助系统、车辆行驶辅助方法、设备及介质,所述车辆行驶辅助系统安装在车辆上,所述车辆行驶辅助系统包括:安装在所述车辆的左前轮处的第一车轮转角采集模块、安装在所述车辆的右前轮处的第二车轮转角采集模块、安装在所述车辆左前方的第一拍摄模块、安装在所述车辆右前方的第二拍摄模块和车载显示模块,其中,所述第一车轮转角采集模块与所述第一拍摄模块通信连接,所述第二车轮转角采集模块与所述第二拍摄模块通信连接,所述第一拍摄模块和所述第二拍摄模块分别与所述车载显示模块通信连接;所述第一车轮转角采集模块,用于当所述车辆右转时,采集所述车辆的左前轮的第一车轮旋转角度,并将所述第一车轮旋转角度发送至所述第一拍摄模块;所述第一拍摄模块,用于基于所述第一车轮旋转角度进行逆时针旋转,采集所述车辆左后方的第一影像,并将所述第一影像发送至所述车载显示模块;所述第二车轮转角采集模块,用于当所述车辆左转时,采集所述车辆的右前轮的第二车轮旋转角度,并将所述第二车轮旋转角度发送至所述第二拍摄模块;所述第二拍摄模块,用于基于所述第二车轮旋转角度进行顺时针旋转,采集所述车辆右后方的第二影像,并将所述第二影像发送至所述车载显示模块;所述车载显示模块,用于接收所述第一影像并进行显示,或者,接收所述第二影像并进行显示。
33、这样,车辆右转时,安装在车辆左前方的第一拍摄模块逆时针转动指定角度,以补偿车辆左侧后视镜观察不到的方位情况;车辆左转时,安装在车辆右前方的第二拍摄模块顺时针转动,以补偿车辆左侧后视镜观察不到的方位情况,为驾驶员在驾驶车辆通过路口时提供辅助,提高驾驶安全性。
34、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!