自适应巡航功能安全监控的控制方法及电子设备与流程
本申请涉及车辆控制,尤其涉及一种自适应巡航功能安全监控的控制方法及电子设备。
背景技术:
1、在整车控制器(vehicle control unit,vcu)或动力域控制器(power domaincontrol unit,pdcu)对于自适应巡航系统(adaptive cruise control,acc)状态进行功能安全监控时,当检测到acc功能故障时,错误的响应acc的请求信号可能会出现动力丢失的情况(整车进入零扭矩的安全状态),影响用户的用车体验。
技术实现思路
1、有鉴于此,本申请的目的在于提出一种自适应巡航功能安全监控的控制方法及电子设备,用于降低对acc请求的错误响应概率。
2、基于上述目的,本申请的第一方面提供了一种自适应巡航功能安全监控的控制方法,包括:
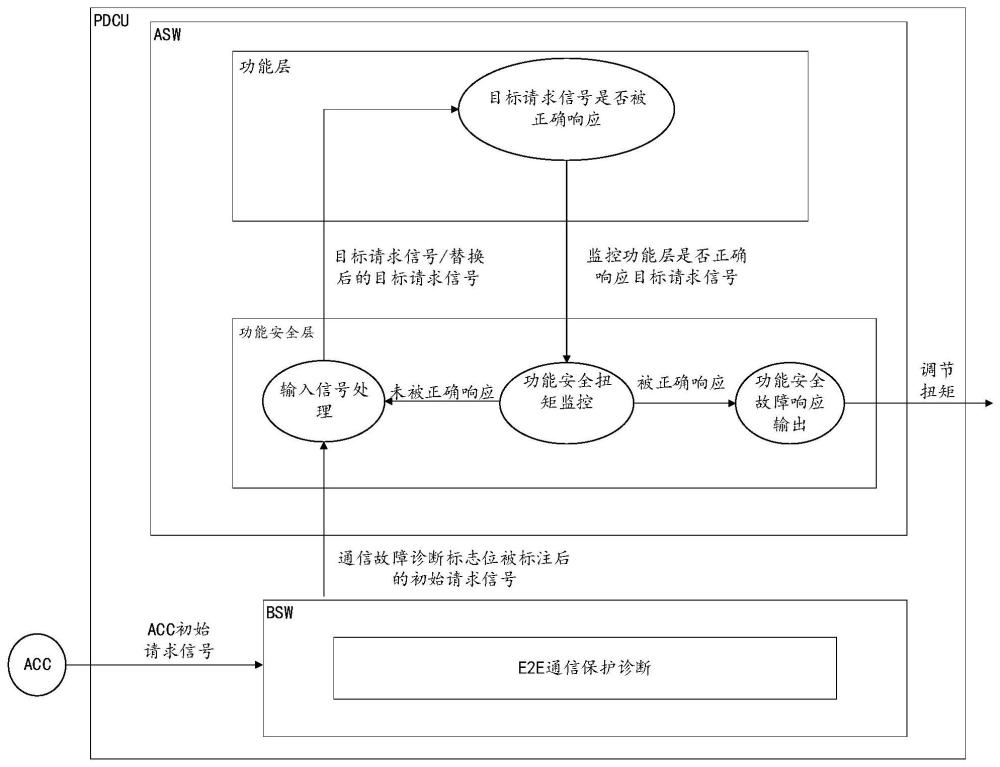
3、获取自适应巡航系统发出的初始请求信号,并对所述初始请求信号进行端到端通信保护诊断;
4、根据诊断结果确定目标请求信号;
5、监测所述目标请求信号是否被正确响应;
6、若所述目标请求信号未被正确响应,将所述目标请求信号标记不激活状态,并将所述目标请求信号中的请求值替换为预设的代替值,若替换后的所述目标请求信号被正确响应,根据替换后的所述目标请求信号进行扭矩调节。
7、本申请的第二方面提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本申请第一方面提供的所述的方法。
8、从上面所述可以看出,本申请提供的自适应巡航功能安全监控的控制方法及电子设备,能够获取自适应巡航系统发出的初始请求信号,并对初始请求信号进行端到端通信保护诊断;在响应初始请求信号前进行通信故障诊断,对在进行传输的数据进行保护,以消除通信链路中可能的失效带来的影响。根据诊断结果确定目标请求信号;不同的诊断结果对应不同目标请求信号,避免响应错误的请求;通过监测目标请求信号是否被正确响应来进一步降低acc请求被错误响应的概率。并在目标请求信号未被正确响应时,将目标请求信号标记不激活状态,并将目标请求信号中的请求值替换为预设的代替值,若替换后的目标请求信号被正确响应,根据替换后的目标请求信号进行扭矩调节。通过对acc请求信号的不激活处理,并使用请求值替换后的替换后的目标请求信号可以实现忽略acc的请求信号,进一步降低错误响应的概率。通过多次降低错误响应的概率可以避免进入整车零扭矩的安全状态,并避免acc非预期加速带来的危害。
技术特征:
1.一种自适应巡航功能安全监控的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述诊断结果确定目标请求信号,包括:
3.根据权利要求1所述的方法,其特征在于,所述监测所述目标请求信号是否被正确响应,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述目标请求信号的存在状态确定是否满足正确响应条件,包括:
5.根据权利要求1所述的方法,其特征在于,所述确定所述自适应巡航系统是否满足正确激活条件,包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述当前调节扭矩确定是否满足正确调节条件,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述扭矩梯度确定是否满足正确梯度条件,包括:
8.根据权利要求1所述的方法,其特征在于,所述对所述初始请求信号进行端到端通信保护诊断,包括:
9.根据权利要求1所述的方法,其特征在于,还包括:
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至9任意一项所述的方法。
技术总结
本申请提供一种本申请实施例提供的自适应巡航功能安全监控的控制方法及电子设备,在响应初始请求信号前进行通信故障诊断,对在进行传输的数据进行保护,以消除通信链路中可能的失效带来的影响。不同的诊断结果对应不同目标请求信号,避免响应错误的请求;通过监测目标请求信号是否被正确响应来进一步降低ACC请求被错误响应的概率。并在目标请求信号未被正确响应时,通过对ACC请求信号的不激活处理,并使用请求值替换后的替换后的目标请求信号可以实现忽略ACC的请求信号,进一步降低错误响应的概率。通过多次降低错误响应的概率可以避免进入整车零扭矩的安全状态,并避免ACC非预期加速带来的危害。
技术研发人员:张亦衡
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!