智能驾驶变道轨迹的生成方法、系统、电子设备及介质与流程
本申请属于智能驾驶的,涉及一种轨迹生成方法,特别是涉及一种智能驾驶变道轨迹的生成方法、系统、电子设备及介质。
背景技术:
1、目前,在自动驾驶行业中,变道轨迹生成方法有撒点构造曲线“拟合五次多项式”、lattice、广撒点之后用贝塞尔曲线拟合法等多种方案。此外,上述方法还包含一些上游决策的思想;拟合出来的变道轨迹曲线具有连续、稳定等特点,方便后端控制的稳定输出。
2、但是,通过上述算法计算出来的轨迹对于芯片算力有着较高的需求,这样在一个整体的自动驾驶架构里面资源分配就存在一定的挑战,因为除了轨迹规划模块,感知模块和控制模块都需要较高的算力来保持系统运行的实时性和连续性。
技术实现思路
1、本申请提供一种智能驾驶变道轨迹的生成方法、系统、电子设备及介质,用于解决如何通过低算力的方式生成自动驾驶可用的变道轨迹的问题。
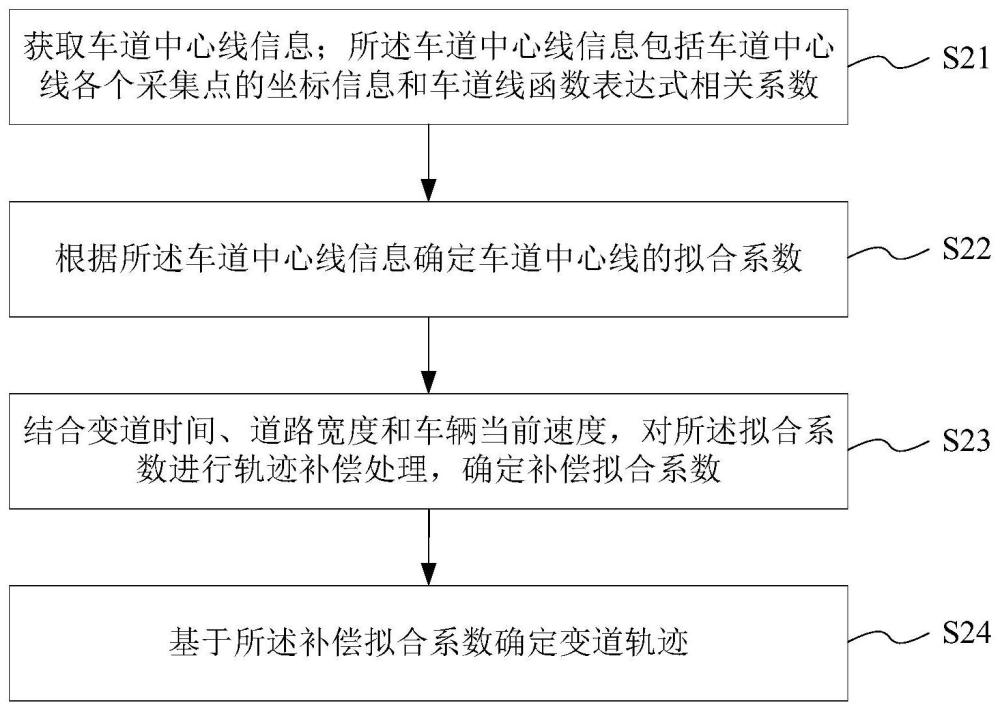
2、第一方面,本申请提供一种智能驾驶变道轨迹的生成方法,所述方法包括:获取车道中心线信息;所述车道中心线信息包括车道中心线各个采集点的坐标信息和车道线函数表达式相关系数;根据所述车道中心线信息确定车道中心线的拟合系数;结合变道时间、道路宽度和车辆当前速度,对所述拟合系数进行轨迹补偿处理,确定补偿拟合系数;基于所述补偿拟合系数确定变道轨迹。
3、在第一方面的一种实现方式中,所述获取车道中心线信息的步骤,包括以下步骤中的至少一个:获取车道中心线基于坐标信息预先拟合的三次多项式;获取车道中心线上分散的采集点的坐标信息,基于分散的采集点的坐标信息拟合为三次多项式。
4、在第一方面的一种实现方式中,所述根据所述车道中心线信息确定车道中心线的拟合系数的步骤,包括:根据所述三次多项式确定车道中心线的拟合系数,所述拟合系数包括常数项系数、一次项系数和二次项系数。
5、在第一方面的一种实现方式中,所述结合变道时间、道路宽度和车辆当前速度,对所述拟合系数进行轨迹补偿处理,确定补偿拟合系数的步骤,包括:结合所述变道时间和道路宽度,对所述常数项系数进行偏差补偿处理,确定第一补偿系数;结合所述变道时间和所述车辆当前速度,对所述一次项系数进行角度补偿处理,确定第二补偿系数;结合所述第二补偿系数、所述变道时间和所述车辆当前速度,对所述二次项系数进行曲率补偿处理,确定第三补偿系数。
6、在第一方面的一种实现方式中,所述基于所述补偿拟合系数确定变道轨迹的步骤,包括:将所述第一补偿系数作为新的常数项系数,将所述第二补偿系数作为新的一次项系数,将所述第三补偿系数作为新的二次项系数;确定所述变道轨迹的表达式为:y=第一补偿系数+第二补偿系数*x+第三补偿系数*x2+三次项系数*x3;其中,y表示所述变道轨迹中点的纵坐标,x表示所述变道轨迹中点的横坐标。
7、在第一方面的一种实现方式中,在所述基于所述补偿拟合系数确定变道轨迹的步骤之后,所述方法还包括:结合所述变道时间、所述道路宽度和所述车辆当前速度,对所述第一补偿系数、所述第二补偿系数和所述第三补偿系数进行轨迹补偿处理,以对所述变道轨迹进行迭代更新。
8、在第一方面的一种实现方式中,所述方法还包括:预先设置车辆速度和/或道路曲率与所述变道时间的对应关系;结合实际驾驶场景中车辆当前速度和/或道路曲率对所述变道时间进行标定。
9、第二方面,本申请提供一种智能驾驶变道轨迹的生成系统,所述系统包括:车道信息获取模块,被配置为获取车道中心线信息;所述车道中心线信息包括车道中心线各个采集点的坐标信息和车道线函数表达式相关系数;系数确定模块,被配置为根据所述车道中心线信息确定车道中心线的拟合系数;系数补偿模块,被配置为结合变道时间、道路宽度和车辆当前速度,对所述拟合系数进行轨迹补偿处理,确定补偿拟合系数;变道轨迹确定模块,被配置为基于所述补偿拟合系数确定变道轨迹。
10、第三方面,本申请提供一种电子设备,所述电子设备包括:处理器及存储器;所述存储器用于存储计算机程序,所述处理器用于执行所述存储器存储的计算机程序,以使所述电子设备执行所述的方法。
11、第四方面,本申请提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被电子设备执行时实现所述的方法。
12、如上所述,本申请所述的智能驾驶变道轨迹的生成方法、系统、电子设备及介质,具有以下有益效果:
13、本申请通过三次多项式系数的补偿及迭代更新,实现了低算力项目需求下的变道轨迹生成;算法里面不包含撒点、矩阵运算、二次规划以及最值求解等高算力需求的算法;本申请输出的变道轨迹不同于以往的三次样条曲线插值或者曲线拼接等复杂方案,本身可以不断迭代更新;本申请算法输出的变道轨迹具有稳定性、平滑性,无较大噪音,亦可以满足智驾变道需求。
技术特征:
1.一种智能驾驶变道轨迹的生成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取车道中心线信息的步骤,包括以下步骤中的至少一个:
3.根据权利要求2所述的方法,其特征在于,所述根据所述车道中心线信息确定车道中心线的拟合系数的步骤,包括:
4.根据权利要求3所述的方法,其特征在于,所述结合变道时间、道路宽度和车辆当前速度,对所述拟合系数进行轨迹补偿处理,确定补偿拟合系数的步骤,包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述补偿拟合系数确定变道轨迹的步骤,包括:
6.根据权利要求5所述的方法,其特征在于,在所述基于所述补偿拟合系数确定变道轨迹的步骤之后,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.一种智能驾驶变道轨迹的生成系统,其特征在于,所述系统包括:
9.一种电子设备,其特征在于,所述电子设备包括:处理器及存储器;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被电子设备执行时实现权利要求1至7任一项所述的方法。
技术总结
本申请提供一种智能驾驶变道轨迹的生成方法、系统、电子设备及介质,所述方法包括:获取车道中心线信息;所述车道中心线信息包括车道中心线各个采集点的坐标信息和车道线函数表达式相关系数;根据所述车道中心线信息确定车道中心线的拟合系数;结合变道时间、道路宽度和车辆当前速度,对所述拟合系数进行轨迹补偿处理,确定补偿拟合系数;基于所述补偿拟合系数确定变道轨迹。本申请提供了一种低算力的变道轨迹生成方法,所输出的变道轨迹稳定平滑无较大噪音,可以满足智能驾驶需求。
技术研发人员:谢腾宇,王斌,程鹏,袁率,邱启伦
受保护的技术使用者:上海保隆汽车科技股份有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!