考虑电机故障的四轮轮毂电机驱动车辆节能扭矩分配方法
本发明涉及新能源汽车,特别是涉及一种考虑电机故障的四轮轮毂电机驱动车辆节能扭矩分配方法。
背景技术:
1、基于国家能源战略的考虑,新能源汽车已然成为了汽车行业发展重点,四轮轮毂电机驱动车辆作为新能源汽车的一个重要方向,与传统中央驱动和传统四驱相比,具备更好的操控性。在四轮轮毂电机驱动车辆的扭矩分配直接决定了车辆的综合能耗、操纵稳定性,一直备受研究人员关注。传统的扭矩分配方法主要基于车辆动态性能需求、路面条件和车辆状态等因素进行控制,以实现最佳的驱动性能。然而,在实际应用中,四轮轮毂电机驱动车辆可能会面临电机故障的情况。电机故障可能导致某些驱动轮的失效或降扭,从而影响车辆性能和安全。
2、因生产制造、工作条件、电机更换等因素,四个轮毂电机的最佳工作区间的分布通常存在差异性,传统的扭矩分配忽略了各个电机效率的差异性,容易导致部分电机工作在低效率,降低了整车的能量利用率,不利于车辆续航。另外,轮毂电机工作的环境恶劣,天气、振动、水、尘等因素均易导致电机出现故障或者性能衰退,传统的扭矩分配方式难以保证四轮轮毂电机在故障或者性能衰退情况下的最佳能量利用率。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的考虑电机故障的四轮轮毂电机驱动车辆节能扭矩分配方法解决了传统扭矩分配忽视各个电机效率的差异性,且难以保证在电机故障或者性能衰退情况下的能量利用率的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:一种考虑电机故障的四轮轮毂电机驱动车辆节能扭矩分配方法,包括以下步骤:
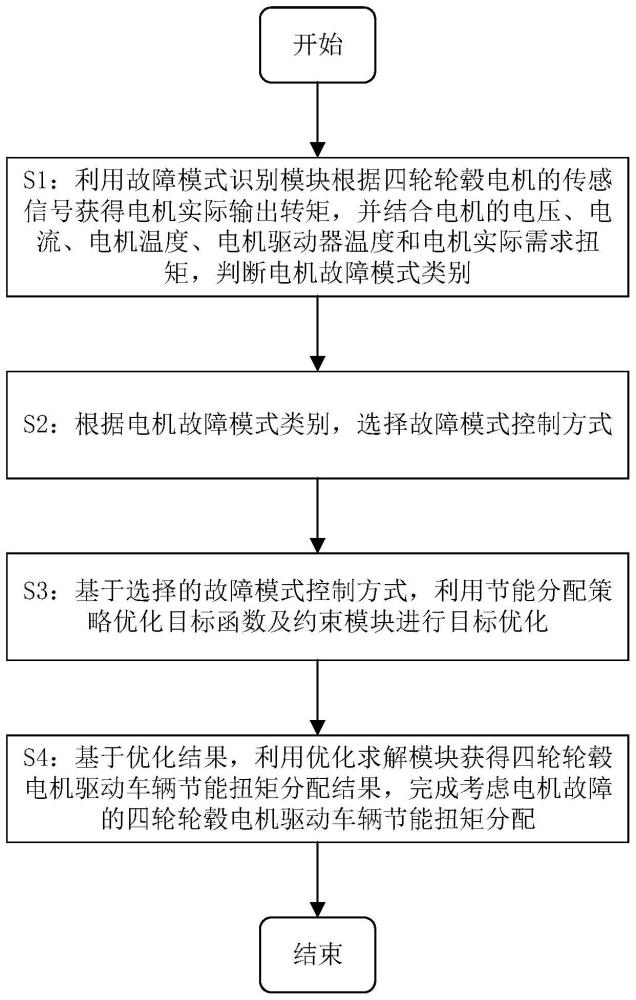
3、s1:利用故障模式识别模块根据四轮轮毂电机的传感信号获得电机实际输出转矩,并结合电机的电压、电流、电机温度、电机驱动器温度和电机实际需求扭矩,判断电机故障模式类别;
4、s2:根据电机故障模式类别,选择故障模式控制方式;
5、s3:基于选择的故障模式控制方式,利用节能分配策略优化目标函数及约束模块进行目标优化;
6、s4:基于优化结果,利用优化求解模块获得四轮轮毂电机驱动车辆节能扭矩分配结果,完成考虑电机故障的四轮轮毂电机驱动车辆节能扭矩分配。
7、上述方案的有益效果是:本发明提出了一种考虑电机故障模式的四轮轮毂电机驱动车辆节能扭矩分配方法,主要由故障模式识别、故障模式控制方式选择、节能分配策略优化目标函数及约束、优化求解4个步骤组成,通过考虑电机效率差异性,并根据不同的故障模式进行扭矩分配优化求解,实现更高效的能量利用,提高车辆的续航,解决了传统扭矩分配忽视各个电机效率的差异性,且难以保证在电机故障或者性能衰退情况下的能量利用率的问题。
8、进一步地,s2中电机故障模式类别包括正常模式、完全失效模式和性能限制模式;
9、完全失效模式包括单电机故障、同侧双电机故障、异侧同轴双电机故障、异侧异轴双电机故障、三电机故障和四电机故障;
10、性能限制模式包括单电机故障限速或限扭、同侧双电机故障限速或限扭、异侧同轴双电机故障限速或限扭、异侧异轴双电机故障限速或限扭、三电机故障限速或限扭、四电机故障限速或限扭。
11、上述进一步方案的有益效果是:本发明将电机故障分为上述多种模式,用于后续对不同模式分别进行控制。
12、进一步地,正常模式的控制方法为:按照正常控制状态进行控制,四个电机的扭矩为电机最大扭矩,并进入节能分配策略优化目标函数及约束模块进行目标优化;
13、单电机故障的控制方法为:进行正常驱动,实现直线行驶,并进入节能分配策略优化目标函数及约束模块进行目标优化;
14、同侧双电机故障的控制方法为:存在跑偏现象,结合转向进行控制,且对2个正常电机进行节能分配,并进入节能分配策略优化目标函数及约束模块进行目标优化;
15、异侧同轴双电机故障和异侧异轴双电机故障的控制方法为:正常驱动,通过差扭分配实现附加横摆力矩,并进入节能分配策略优化目标函数及约束模块进行目标优化;
16、三电机故障的控制方法为:低速跛行,不进入节能分配策略优化目标函数及约束模块;
17、四电机故障的控制方法为:停车,并进入节能分配策略优化目标函数及约束模块进行目标优化;
18、性能限制模式的控制方法为:在限制的速度和扭矩范围内进行扭矩分配优化,并进入节能分配策略优化目标函数及约束模块进行目标优化。
19、上述进一步方案的有益效果是:通过上述技术方案,对电机的不同故障模式,设置相应的控制方式,并判断是否进入节能分配策略优化目标函数及约束模块。
20、进一步地,s3中节能分配策略优化目标函数及约束模块的目标函数和约束条件公式为:
21、
22、其中,min表示取最小值,pbat_dem为电池输出功率,tfl为左前轮电机扭矩,tfr为右前轮电机扭矩,trl为左后轮电机扭矩,trr为右后轮电机扭矩,ω为转速,ηfl为左前轮电机效率,ηfr为右前轮电机效率,ηrl为左后轮电机效率,ηrr为右后轮电机效率,tdemand为车辆的总需求扭矩,tfl_able为左前轮电机扭矩最大值,tfr_able为右前轮电机扭矩最大值,trl_able为左后轮电机扭矩最大值,trr_able为右后轮电机扭矩最大值,voc为电池开路电压,ibat为电流,rw为车轮半径,μ为路面附着系数,fz_fl为左前轮电机垂直载荷,fz_fr为右前轮电机垂直载荷,fz_rl为左后轮电机垂直载荷,fz_rr为右后轮电机垂直载荷,δmz为横摆力矩,a为质心到前轴的距离,δ为车轮转角,b为轮距,fη_fl(·)为左前轮电机的效率map特性,fη_fr(·)为右前轮电机的效率map特性,fη_rl(·)为左后轮电机的效率map特性,fη_rr(·)为右后轮电机的效率map特性。
23、上述进一步方案的有益效果是:通过上述技术方案,提供了车辆在行驶过程中的目标函数pbat_dem和约束条件,其中,约束条件包括总需求扭矩约束、电机驱动扭矩约束、电池功率约束、地面附着约束和横摆力矩约束。
24、进一步地,s4中优化求解模块的最终优化分配问题,简化为以tfr、trl和trr为坐标轴的空间平面优化问题,为满足所述约束条件的优化求解空间集内的最优三维空间坐标点pbest,公式为:
25、
26、上述进一步方案的有益效果是:通过上述技术方案,将最终的优化分配问题转换成空间平面优化问题,实现优化求解。
27、进一步地,优化求解采用在线遍历优化,包括以下分步骤:
28、s4-1:将tfr和trl分别等间隔划分为n份和m份,并结合相关公式计算每一种tfr和trl组合下的tfr和trl,相关公式为:
29、tdemand=tfl+tfr+trl+trr
30、d=atfr+btrl+ctrr
31、其中,a、b、c和d均为常数;
32、s4-2:判断每一种组合是否均满足所述约束条件,如果是,则计算pbat_dem,如果否,则pbat_dem为无穷大;
33、s4-3:重复上述步骤s4-1和s4-2,获得n*m的矩阵pbat_dem,并判断矩阵pbat_dem中最小值对应的矩阵的行k1和列k2,获得四轮轮毂电机驱动车辆节能扭矩分配结果,公式为:
34、
35、上述进一步方案的有益效果是:通过采用在线遍历优化,完成扭矩分配的优化求解,获得最节能的扭矩分配求解结果,提高能量高效利用。
- 还没有人留言评论。精彩留言会获得点赞!