一种船上物流用自适应AGV小车及其自适应方法与流程
本发明属于船舶转运设备,尤其涉及一种船上物流用自适应agv小车及其自适应方法。
背景技术:
1、随着海洋船舶行业的发展,在船舶和海洋平台运行时,对于转运设备的需求越来越高,如在陆地上通常使用agv小车等智能化转运设备进行货物转运,但由于在海洋环境中,常规的智能化转运设备难以抵抗由风浪作用产生的颠簸以及倾斜摇晃等情况,即转运设备难以保持稳定,安全性较差。
技术实现思路
1、本发明的目的在于,为克服现有技术缺陷,提供了一种船上物流用自适应agv小车及其自适应方法,采用磁悬浮驱动装置为agv小车与甲板之间产生额外的吸力,使agv小车在自重以及吸力的作用提高对风浪的抵抗作用,同时车身与底盘之间柔性连接,在风浪较大时,车身能够在驱动电机的作用下与底盘之间形成夹角,降低车身的重心,在风浪中保持稳定,即能够在受风浪作用下,保持安全且平稳的行驶状态,沿预设路径完成船上物流的自动化转运,提高船舶以及海洋平台运行时的货物物流效率。
2、本发明目的通过下述技术方案来实现:
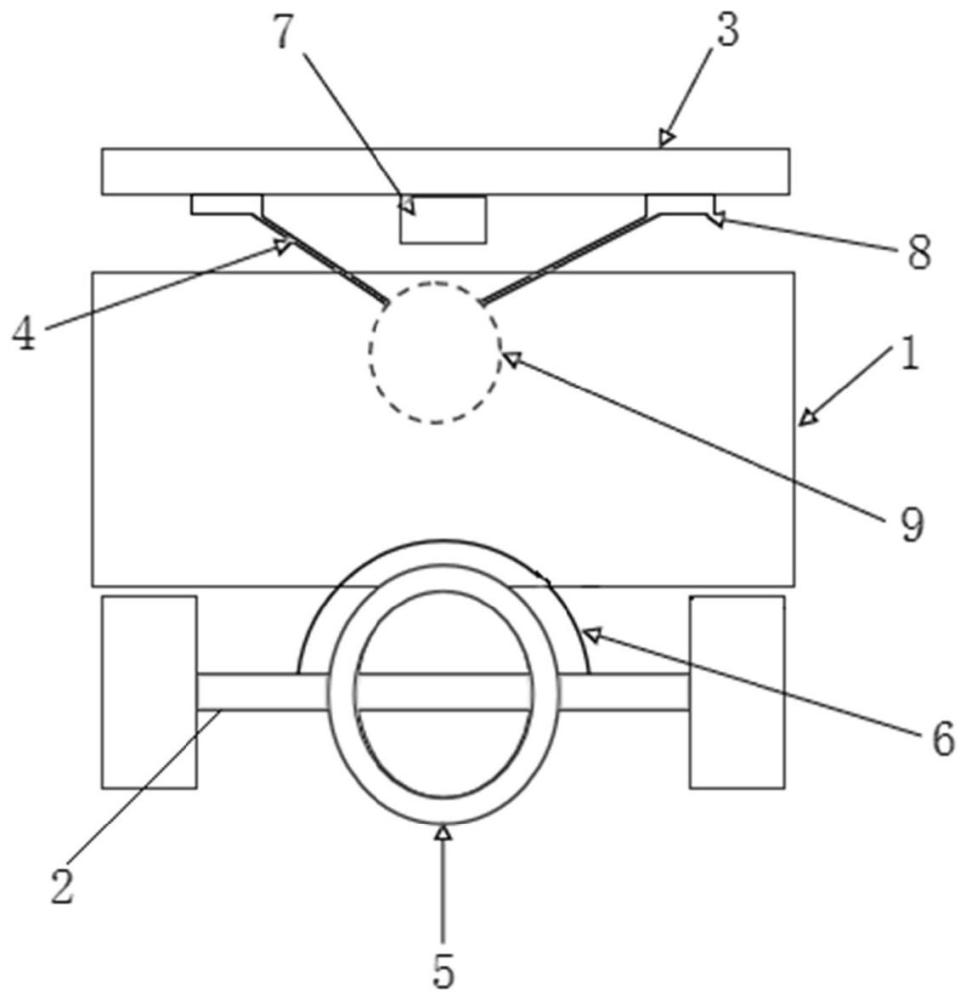
3、一种船上物流用自适应agv小车,包括底盘以及设置在所述底盘上的车身,所述车身的顶部连接有载货平台;
4、其中,所述底盘包括两个相对设置的磁悬浮驱动装置以及位于两个所述磁悬浮驱动装置之间的底板,所述底板通过连接杆与所述磁悬浮驱动装置连接,所述底盘上设置有回转支撑装置,所述回转支撑装置包括驱动电机以及与所述驱动电机的输出轴连接的齿轮,所述齿轮上啮合有支撑环,所述车身的底部设置有环形齿条,所述环形齿条与所述支撑环的外齿轮相互啮合。
5、在一个实施方式中,还包括设置在所述驱动电机的输出轴上的扭矩传感器,所述扭矩传感器与所述驱动电机电连接,通过本实施方式,通过设置的扭矩传感器采集风浪对agv小车的作用力大小,以便驱动电机能够更加精确地带动车身倾斜。
6、在一个实施方式中,所述载货平台的底部中心设置有陀螺仪,所述车身上还安装有转向电机,所述转向电机的输出端上设置有轴套,所述轴套上具有与所述载货平台连接的固定杆,所述陀螺仪与所述转向电机电连接,通过本实施方式,通过在载货平台底部设置的陀螺仪实时检测载货平台与地平面之间的角度,即判断载货平台是否由于船舶倾斜和/或车身倾斜而出现偏移,当载货平台与地平面之间存在角度时,即通过转向电机驱动固定杆,进而带动载货平台旋转至与地平面平行,即保证载货平台始终与地平面之间平行,使得在agv小车适应风浪和船舶颠簸的过程中,避免载货平台上的货物出现跌落或滑落等情况。
7、在一个实施方式中,所述驱动电机的输出轴上设置有多个所述齿轮,每个所述齿轮上均啮合有所述支撑环,所述车身的底部设置有多个与所述支撑环对应的环形齿条,通过本实施方式,即在输出轴上顺次设置多个齿轮,均啮合有支撑环,使得车身通过多个顺次设置的支撑环与底盘连接,一方面采用多个支撑环对车身的多点进行支撑,提高支撑的稳定性,另一方面还提高了车身与底盘之间的连接稳定性,使得车身在倾斜降低重心时不容易与底盘脱离。
8、在一个实施方式中,所述底板呈圆柱形结构,所述底板通过多个间隔分布的连接杆与所述磁悬浮驱动装置连接,所述支撑环穿过所述底板并位于相邻两个所述连接杆之间的间隙内,通过本实施方式,即设置的支撑环穿过所述底板,使得支撑环具有较大的直径,即采用直径较大的支撑环与环形齿条进行配合,使得车身与底盘之间的连接更为稳定。
9、本发明还提供了一种上述船上物流用自适应agv小车的自适应方法,包括:
10、采集agv小车所受风浪的冲击力大小,并根据该冲击力调节所述agv小车的倾斜程度,以降低其重心;
11、通过陀螺仪实时采集agv小车上的载货平台与地平面之间的倾角大小;
12、根据该倾角大小,驱动与载货平台连接的转向电机带动所述载货平台保持与地平面平行的姿态;
13、通过本实施方式,通过使agv小车在迎风时处于倾斜状态,降低重心的方式来提高其稳定性,同时始终保持车身上的载货平台能够与地平面平行,避免货物散落,使得agv小车能够适用于船舶或海洋平台上,提高货物物流效率。
14、在一个实施方式中,采用磁悬浮驱动装置作为所述agv小车在甲板上移动的驱动底盘,以使所述agv小车与甲板之间产生额外的吸力;通过本实施方式,使得agv小车不仅能够通过自重,即与甲板之间的摩擦力来保持其在风浪下的稳定性,还通过磁悬浮驱动装置产生了与甲板之间的吸力,即提高其自身抵抗摇晃的能力,使得其能够沿着预设路线进行货运运输。
15、在一个实施方式中,采集agv小车所受风浪的冲击力大小,并根据该冲击力调节所述agv小车的倾斜程度,以降低其重心,包括:
16、通过环形齿条与具有外齿轮的支撑环将车身与驱动底盘软连接,支撑环通过驱动电机驱动旋转,带动环形齿条上的车身与其同步转动,在驱动电机的输出轴上设置扭矩传感器,车身受风浪的冲击力传递至电机的输出轴上,根据扭矩传感器实时检测的冲击力大小生成电机驱动参数并传递至驱动电机上,驱动电机根据该电机驱动参数带动车身旋转至目标倾斜姿态。
17、在一个实施方式中,所述陀螺仪根据采集到的倾角大小生成调节参数并发出调节指令给转向电机,所述转向电机驱动载货平台旋转,所述陀螺仪检测角度的精度在±0.5°以内,所述陀螺仪发出调节指令至所述转向电机驱动载货平台旋转完的调节时间在50ms以内,通过本实施方式,即保证陀螺仪的检测精度以及一次调节的时间,使agv小车在受风浪的冲击力下时,转向电机能够快速且多次地保持对载货平台持续进行调节,避免载货平台出现较大的晃动。
18、本发明的有益效果在于:
19、采用磁悬浮驱动装置作为agv小车的驱动设备,其作为底盘的一部分,能够使agv小车与甲板之间产生额外的吸力,使agv小车在自重以及吸力的作用提高对风浪的抵抗作用,同时agv小车的车身与底盘之间通过柔性连接的方式,即在风浪较大时,车身能够在驱动电机的带动下随着支撑环一起进行旋转,即与底盘之间形成一定的夹角,降低车身的重心,在风浪中保持稳定,即能够在受风浪的冲击力下,仍然保持安全且平稳的行驶状态,使其能够沿预设路径完成船上物流的自动化转运,提高船舶以及海洋平台运行时的货物物流效率,同时载货平台能够在船舶或海洋平台发生摇晃,或车身倾斜时,在转向电机的调节下始终保持与地平面平行的姿态,避免货物跌落。
技术特征:
1.一种船上物流用自适应agv小车,其特征在于,包括底盘以及设置在所述底盘上的车身,所述车身的顶部连接有载货平台;
2.根据权利要求1所述的一种船上物流用自适应agv小车,其特征在于,还包括设置在所述驱动电机的输出轴上的扭矩传感器,所述扭矩传感器与所述驱动电机电连接。
3.根据权利要求2所述的一种船上物流用自适应agv小车,其特征在于,所述载货平台的底部中心设置有陀螺仪,所述车身上还安装有转向电机,所述转向电机的输出端上设置有轴套,所述轴套上具有与所述载货平台连接的固定杆,所述陀螺仪与所述转向电机电连接。
4.根据权利要求1所述的一种船上物流用自适应agv小车,其特征在于,所述驱动电机的输出轴上设置有多个所述齿轮,每个所述齿轮上均啮合有所述支撑环,所述车身的底部设置有多个与所述支撑环对应的环形齿条。
5.根据权利要求4所述的一种船上物流用自适应agv小车,其特征在于,所述底板呈圆柱形结构,所述底板通过多个间隔分布的连接杆与所述磁悬浮驱动装置连接,所述支撑环穿过所述底板并位于相邻两个所述连接杆之间的间隙内。
6.一种如权利要求1至5任一项所述的船上物流用自适应agv小车的自适应方法,其特征在于,包括:
7.根据权利要求6所述的一种船上物流用自适应agv小车的自适应方法,其特征在于,还包括:
8.根据权利要求7所述的一种船上物流用自适应agv小车的自适应方法,其特征在于,采集agv小车所受风浪的冲击力大小,并根据该冲击力调节所述agv小车的倾斜程度,以降低其重心,包括:
9.根据权利要求6所述的一种船上物流用自适应agv小车的自适应方法,其特征在于,所述陀螺仪根据采集到的倾角大小生成调节参数并发出调节指令给转向电机,所述转向电机驱动载货平台旋转,所述陀螺仪检测角度的精度在±0.5°以内,所述陀螺仪发出调节指令至所述转向电机驱动载货平台旋转完的调节时间在50ms以内。
技术总结
本发明公开了一种船上物流用自适应AGV小车及其自适应方法,包括底盘以及设置在所述底盘上的车身,所述车身的顶部连接有载货平台;其中,所述底盘包括两个相对设置的磁悬浮驱动装置以及位于两个所述磁悬浮驱动装置之间的底板,所述底板通过连接杆与所述磁悬浮驱动装置连接,所述底盘上设置有回转支撑装置,所述回转支撑装置包括驱动电机以及与所述驱动电机的输出轴连接的齿轮,所述齿轮上啮合有支撑环,所述车身的底部设置有环形齿条,所述环形齿条与所述支撑环的外齿轮相互啮合。本发明的AGV小车能够在受风浪作用下,保持安全且平稳的行驶状态,沿预设路径完成船上物流的自动化转运,提高船舶以及海洋平台运行时的货物物流效率。
技术研发人员:张献军,易黄懿,卫津民,张帮荣,施亮,黄志铭
受保护的技术使用者:云南昆船智能装备有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!