多功能管涵水务探测机器人的制作方法
本技术涉及探测机器人,特别是多功能管涵水务探测机器人。
背景技术:
1、现有技术中,城市给水管道、排水管道、涵洞等经常受到面源污染、点源污染、长期雨水冲刷、寿命到期老化、外界破坏等情况,需要经常进行巡查勘探检测,而在一些人力风险很大或根本无法采用人工方法实施探测的环境中,利用智能水务探测机器人进行相关工作,比如在被污染淤积的小口径管道、小尺寸截面涵洞等环境或者是在易燃、易爆、缺氧的环境下工作,能够有效的保证人身安全,可以满足多种功能进行探测,全面掌握探测数据,提高探测准确度及工作效率。
2、而现有技术的探测设备多采用电机带动车轮或履带的方式驱动探测设备进行探测,但在水务管涵里情况复杂,车轮及履带探测设备的过障能力很差,在一些恶劣的环境中根本无法进行探测任务。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供多功能管涵水务探测机器人,有效解决了现有技术的不足。
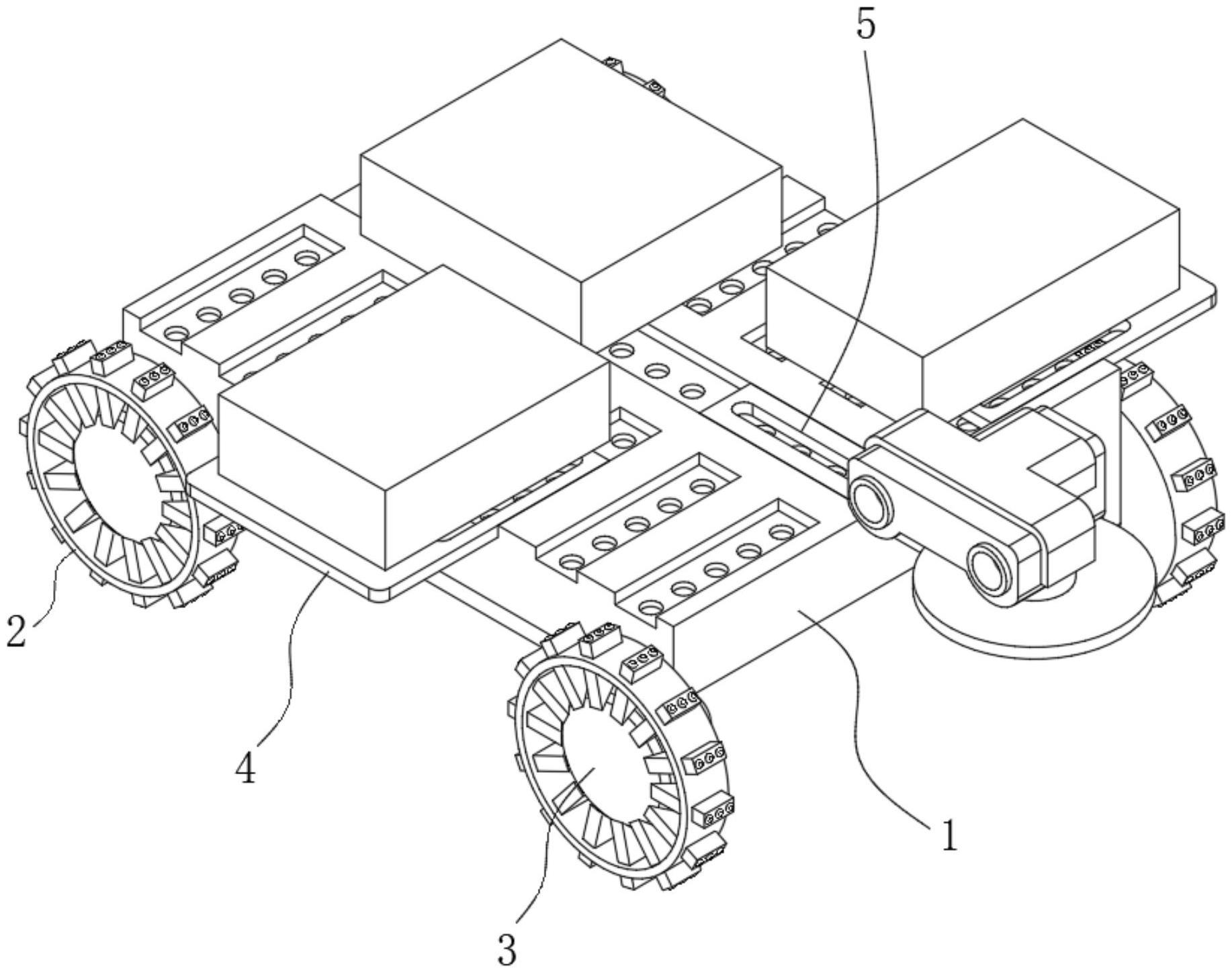
2、为了实现上述目的,本实用新型一方面的实施例提供了多功能管涵水务探测机器人,包括车体,所述车体外部的四角处均设置有可自由转动的车轮,四个所述车轮均内部中空、且外侧开口,四个所述车轮的内部均设置有可往复运动的推板,四个所述推板的外部均滑动连接有多个拨板,多个所述拨板分别贯穿四个所述车轮,且与其滑动连接,所述车体顶面的中部和两侧均开设有安装槽,所述车体的顶面设置有拓展平台,所述拓展平台外部的一侧位于所述安装槽的内部。
3、由上述任一方案优选的是,所述车体外部的四角处均固定连接有固定板,四个所述车轮封闭侧的外表面均固定连接有固定筒,四个所述固定筒分别贯穿四个所述固定板,且与其转动连接,通过使用该方案可实现车轮与车体的组合。
4、由上述任一方案优选的是,四个所述固定筒的内部均设置有伸缩电机,四个所述伸缩电机的输出端均设置有所述推板,通过使用该方案可实现推板的往复运动。
5、由上述任一方案优选的是,四个所述推板的外部均固定连接有多个导向座,多个所述拨板的形状均直角梯形,且斜边处的内部均开设有第一滑动槽,多个所述拨板的斜边均与所述推板的外表面贴合,多个所述导向座分别位于多个所述第一滑动槽的内部,且与其滑动连接,通过使用该方案可由推板带动拨板进行伸出和收回运动。
6、由上述任一方案优选的是,四个所述车轮的外部均开设有多个第二滑动槽,多个所述拨板分别贯穿多个所述第二滑动槽,且与其滑动连接,通过使用该方案可对拨板进行运动限位。
7、由上述任一方案优选的是,多个所述拨板直角边的外表面均外凸形成有多个防滑块,通过使用该方案可增加拨板与地面之间的摩擦力。
8、由上述任一方案优选的是,多个所述安装槽的整体形状呈非字形,多个所述安装槽的底壁均开设有多个安装孔,所述拓展平台外部的一侧均开设有槽口,通过使用该方案可便于调整拓展平台的安装位置。
9、本实用新型具有以下优点:
10、1、该多功能管涵水务探测机器人,整体为小车,以车体作为主体,车体外部四角处的下方均设置有可自由转动的车轮,车轮内部中空,且外侧开口,车轮的内部设置有可往复运动的推板,推板的外部滑动连接有多个拨板,多个拨板均贯穿车轮上的第二滑动槽,通过推板的往复运动,可实现多个拨板的伸出和收回,在使用过程中,拨板位于车轮的内部,不会影响车轮的转动,遇到有水或者沼泽的地形时,拨板伸出,通过车轮的转动,拨板可进行拨水,由此实现车辆的前进,便于使用,满足使用的需要。
11、2、该多功能管涵水务探测机器人,车体顶面的中部和两侧均开设有多个安装槽,多个安装槽整体呈非字形,在多个安装槽的底壁均开设有多个安装孔,使用过程中,在车体的顶面安装拓展平台,拓展平台放置在安装槽内,由螺栓贯穿其上的槽口与安装孔螺纹连接,可调整拓展平台的安装位置,方便使用人员根据使用的需要在拓展平台上安装相应的设备,比如摄像头等,方便使用。
技术特征:
1.多功能管涵水务探测机器人,其特征在于:包括车体(1),所述车体(1)外部的四角处均设置有可自由转动的车轮(2),四个所述车轮(2)均内部中空、且外侧开口,四个所述车轮(2)的内部均设置有可往复运动的推板(3),四个所述推板(3)的外部均滑动连接有多个拨板(9),多个所述拨板(9)分别贯穿四个所述车轮(2),且与其滑动连接,所述车体(1)顶面的中部和两侧均开设有安装槽(6),所述车体(1)的顶面设置有拓展平台(4),所述拓展平台(4)外部的一侧位于所述安装槽(6)的内部。
2.根据权利要求1所述的多功能管涵水务探测机器人,其特征在于:所述车体(1)外部的四角处均固定连接有固定板(8),四个所述车轮(2)封闭侧的外表面均固定连接有固定筒(13),四个所述固定筒(13)分别贯穿四个所述固定板(8),且与其转动连接。
3.根据权利要求2所述的多功能管涵水务探测机器人,其特征在于:四个所述固定筒(13)的内部均设置有伸缩电机(11),四个所述伸缩电机(11)的输出端均设置有所述推板(3)。
4.根据权利要求3所述的多功能管涵水务探测机器人,其特征在于:四个所述推板(3)的外部均固定连接有多个导向座(12),多个所述拨板(9)的形状均直角梯形,且斜边处的内部均开设有第一滑动槽(14),多个所述拨板(9)的斜边均与所述推板(3)的外表面贴合,多个所述导向座(12)分别位于多个所述第一滑动槽(14)的内部,且与其滑动连接。
5.根据权利要求4所述的多功能管涵水务探测机器人,其特征在于:四个所述车轮(2)的外部均开设有多个第二滑动槽(10),多个所述拨板(9)分别贯穿多个所述第二滑动槽(10),且与其滑动连接。
6.根据权利要求5所述的多功能管涵水务探测机器人,其特征在于:多个所述拨板(9)直角边的外表面均外凸形成有多个防滑块(15)。
7.根据权利要求6所述的多功能管涵水务探测机器人,其特征在于:多个所述安装槽(6)的整体形状呈非字形,多个所述安装槽(6)的底壁均开设有多个安装孔(7),所述拓展平台(4)外部的一侧均开设有槽口(5)。
技术总结
本技术涉及探测机器人技术领域,特别是多功能管涵水务探测机器人,包括车体,所述车体外部的四角处均设置有可自由转动的车轮,四个所述车轮均内部中空、且外侧开口。本技术的优点在于:整体为小车,以车体作为主体,车体外部四角处的下方均设置有可自由转动的车轮,车轮内部中空,且外侧开口,车轮的内部设置有可往复运动的推板,推板的外部滑动连接有多个拨板,多个拨板均贯穿车轮上的第二滑动槽,通过推板的往复运动,可实现多个拨板的伸出和收回,在使用过程中,拨板位于车轮的内部,不会影响车轮的转动,遇到有水或者沼泽的地形时,拨板伸出,通过车轮的转动,拨板可进行拨水,由此实现车辆的前进,便于使用,满足使用的需要。
技术研发人员:李泉,成慧,陈晓芸,李文聪
受保护的技术使用者:逸泓智能科技(广州)有限公司
技术研发日:20230105
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!