一种机器人腿部散热结构以及足式机器人的制作方法
本申请涉及足式机器人,特别是涉及一种机器人腿部散热结构以及足式机器人。
背景技术:
1、现有足式机器人均包括腿部结构,而腿部结构的电机往往需要比其他电机更大的扭矩和转速,这就不可避免的带来腿部电机温度较高的问题,因此需要对腿部电机进行散热以保证电机的正常运作。
2、在现有技术中,通常都是在电机的外周面上设置一圈散热鳍片,同时使用通过风扇对散热鳍片吹风实现散热的目的,虽然其散热效果好,但是由于散热鳍片的体积较大、数量多,且设置在电机上,这样就会导致电机周向的结构体积较大,外形不够美观,无法满足足式机器人结构设计紧凑的要求。
技术实现思路
1、本申请的目的在于提供一种机器人腿部散热结构以及足式机器人,以解决现有技术中的缺点与不足。
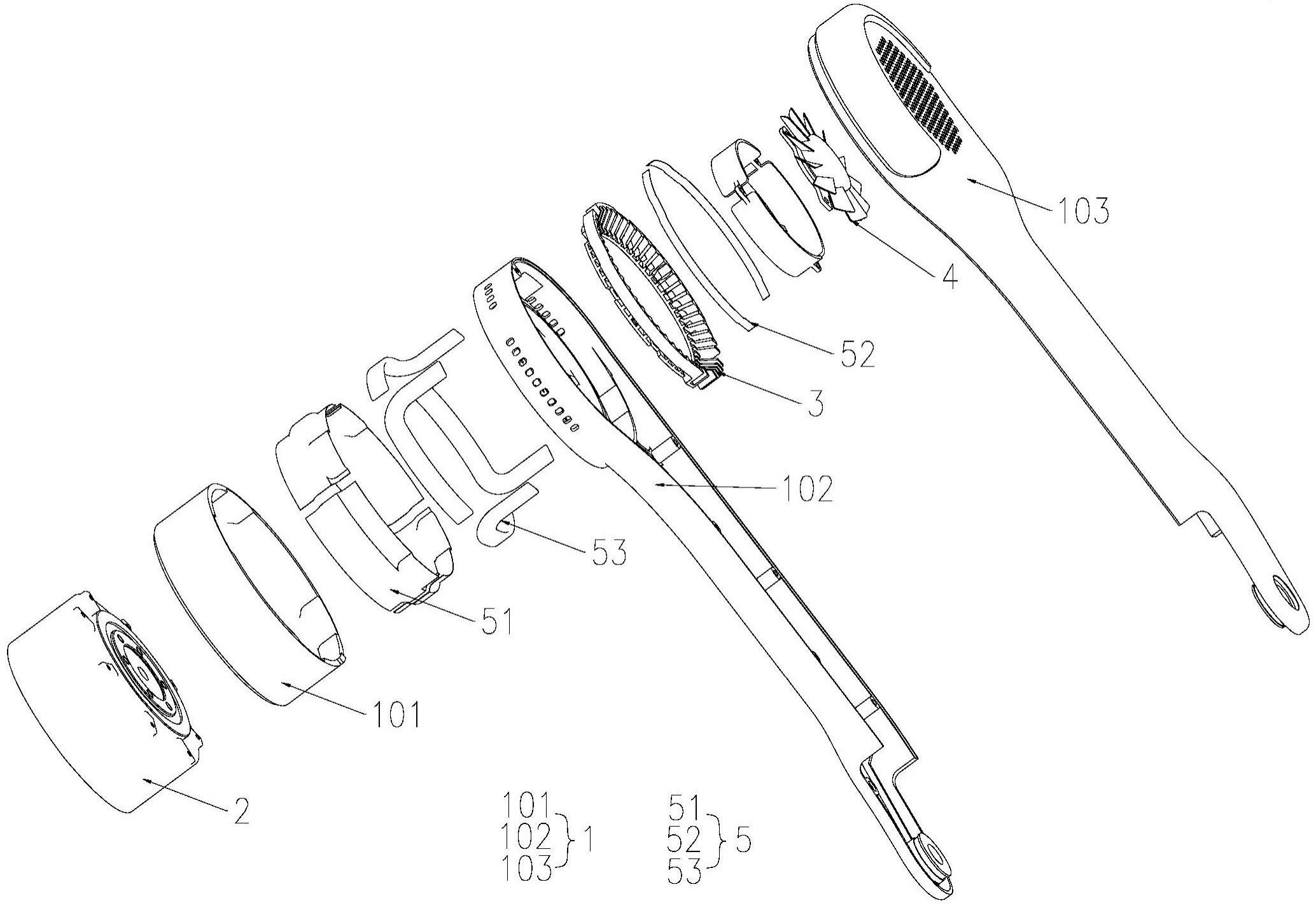
2、本申请的一种机器人腿部散热结构,包括:腿部壳体、电机、散热器、散热风扇以及导热组件;
3、所述腿部壳体内形成有电机安装腔和散热腔,所述腿部壳体上设置有与所述散热腔连通的散热孔,所述电机设置于所述电机安装腔内,所述散热器和散热风扇均设置于所述散热腔内,且所述散热器设置于所述散热风扇的出风端,所述导热组件分别与所述电机的外周面和散热器相连接,以将所述电机外周面的热量传导至所述散热器。
4、相对于现有技术,本申请实施例的机器人腿部散热结构,通过在腿部壳体内形成电机安装腔和散热腔,并通过设置导热组件将电机外周面的热量传导至位于散热腔内的散热器,利用散热风扇对散热器进行散热,这样不仅可以有效地降低电机的温度,而且可以将电机的热量转移到便于散热的位置(散热腔),有利于减少电机周向的结构体积,提高外形美观性,使得整体尺寸较小,满足足式机器人结构设计紧凑的要求。
5、在一优选或可选实施例中,所述散热器为环状结构,其具有沿其周向延伸的导热面以及沿其周向依次间隔排布的多个散热片,所述散热器通过导热面与所述导热组件相连接。
6、在一优选或可选实施例中,所述导热组件包括第一导热膜、第二导热膜以及若干热管,所述第一导热膜贴覆于所述电机的外周面,所述第二导热膜贴覆于所述散热器的导热面,若干所述热管的一端连接于所述第一导热膜,另一端伸入所述散热腔内并连接于所述第二导热膜。
7、在一优选或可选实施例中,若干所述热管沿所述电机的周向均匀布置。
8、在一优选或可选实施例中,所述热管包括一体设置的第一导热段和第二导热段,所述第一导热段沿所述电机的周向延伸设置并与所述第一导热膜连接,所述第二导热段伸入所述散热腔内连接所述第二导热膜。
9、在一优选或可选实施例中,所述第一导热段位于所述第一导热膜和电机的外周面之间。
10、在一优选或可选实施例中,所述散热器、散热风扇和电机同轴设置。
11、在一优选或可选实施例中,所述电机安装腔和散热腔相邻设置,所述腿部壳体内形成有将所述电机安装腔和散热腔相连通的开口,所述电机的端部伸入至所述开口中。
12、在一优选或可选实施例中,所述散热孔包括多个进风孔和多个出风孔,多个所述进风孔正对于所述散热风扇的进风端设置,多个所述出风孔沿所述散热器的周向依次布置且正对于所述散热器。
13、本申请的一种足式机器人,其包括:机器人躯体以及如上所述的机器人腿部散热结构,所述机器人腿部散热结构设置于所述机器人躯体上。
14、为了更好地理解和实施,下面结合附图详细说明本申请。
技术特征:
1.一种机器人腿部散热结构,其特征在于,包括:
2.根据权利要求1所述的机器人腿部散热结构,其特征在于:
3.根据权利要求2所述的机器人腿部散热结构,其特征在于:
4.根据权利要求3所述的机器人腿部散热结构,其特征在于:
5.根据权利要求3所述的机器人腿部散热结构,其特征在于:
6.根据权利要求5所述的机器人腿部散热结构,其特征在于:
7.根据权利要求2所述的机器人腿部散热结构,其特征在于:
8.根据权利要求7所述的机器人腿部散热结构,其特征在于:
9.根据权利要求2-8任一项所述的机器人腿部散热结构,其特征在于:
10.一种足式机器人,其特征在于,包括:
技术总结
本申请提供一种机器人腿部散热结构以及足式机器人,机器人腿部散热结构,包括:腿部壳体、电机、散热器、散热风扇以及导热组件。所述腿部壳体内形成有电机安装腔和散热腔,所述腿部壳体上设置有与所述散热腔连通的散热孔,所述电机设置于所述电机安装腔内,所述散热器和散热风扇均设置于所述散热腔内,且所述散热器设置于所述散热风扇的出风端,所述导热组件分别与所述电机的外周面和散热器相连接,以将所述电机外周面的热量传导至所述散热器。本申请实施例的机器人腿部散热结构,这样不仅可以有效地降低电机的温度,而且可以将电机的热量转移到便于散热的位置(散热腔),有利于减少电机周向的结构体积,满足足式机器人结构设计紧凑的要求。
技术研发人员:舒振,孙海力
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:20230302
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!