一种基于气缸的非独立空气悬挂底盘的制作方法
本技术涉及悬挂底盘,具体是一种基于气缸的非独立空气悬挂底盘。
背景技术:
1、随着机器人技术的发展和推广,机器人常被用于在各种复杂环境和崎岖地形中工作。当机器人在复杂环境和崎岖地形中运动时,为保护机器人内部精密部件及贵重仪器,底盘的设计显得尤为重要。而目前大部分使用麦克纳姆轮的机器人底盘所使用的悬挂常常是独立悬挂,四个轮子彼此独立运动,在复杂地形中四轮同时抓地的能力不强,且所使用的悬挂系统的缓冲行程都比较小,缓震效果不尽如人意,且容易出现1或2个轮子不和地面接触的情况,使机器人失去动力,难以在崎岖地形中大展身手。
2、现有的一些自适应的底盘悬挂方案,通常采用诸如弹簧之类的弹性元件来缓震,或通过复杂的检测、控制结构来控制各个悬挂单元的动作,其存在成本较高,后期维护较为困难,悬挂的弹性及行程不易调节等问题。
技术实现思路
1、针对现有机器人底盘技术中缓震、抓地及脱困能力的短板,本实用新型提供了一种基于气缸的非独立空气悬挂底盘,本空气悬挂底盘通过气缸实现四个轮组的联动进而充当缓震器的作用。
2、为了解决上述技术问题,本发明技术方案如下:
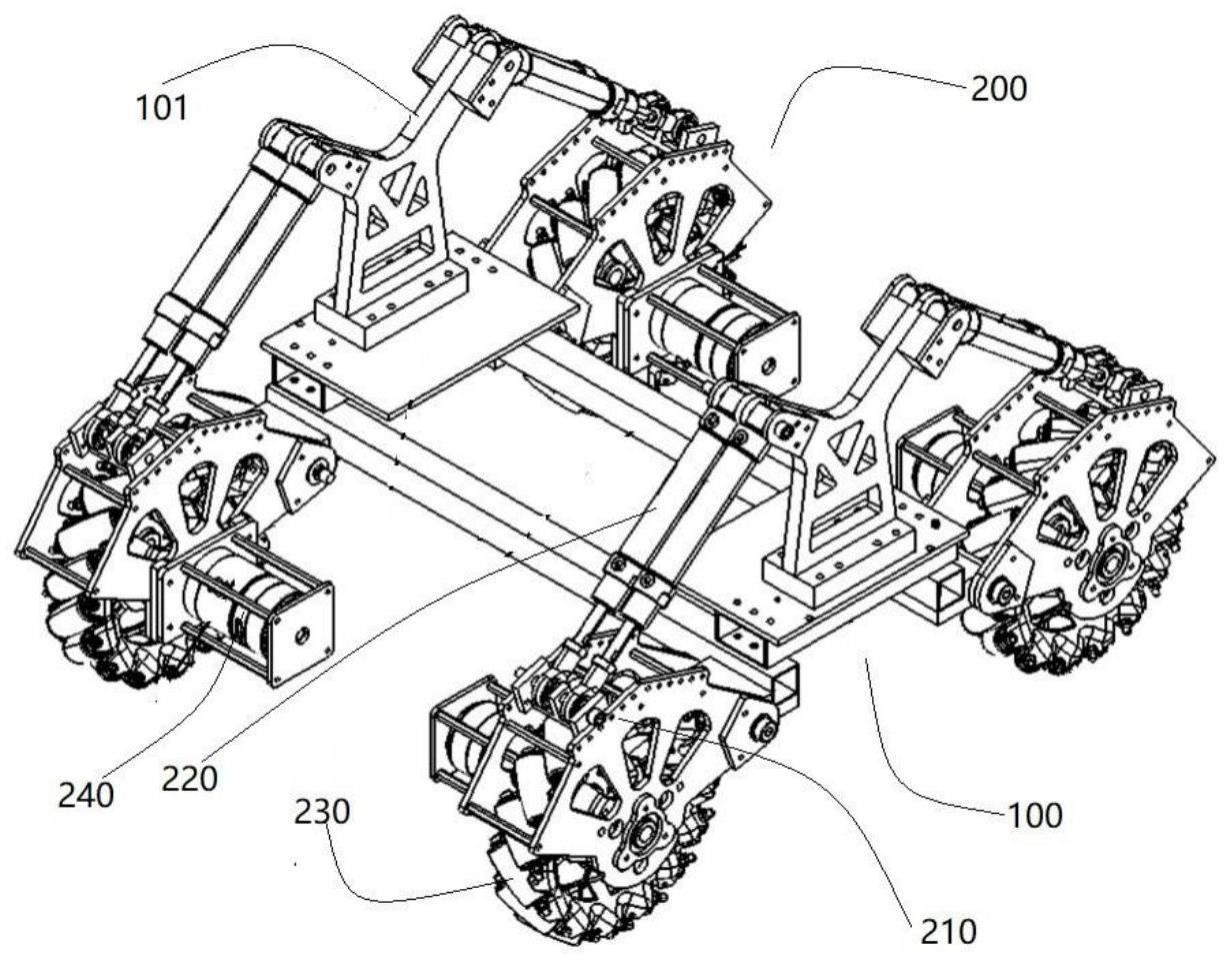
3、一种基于气缸的非独立空气悬挂底盘,包括底盘主体和四个悬挂单元,每个悬挂单元均包括一个悬臂和一个气缸伸缩组件,其中,悬臂与底盘主体铰接,气缸伸缩组件的一端与底盘主体铰接、另一端与悬臂铰接,用于推动悬臂绕悬臂与底盘主体的铰接点转动,从而使得悬臂至少部分沿垂直于底盘主体的方向移动;气缸伸缩组件中包括两个由活塞分割形成的储存气体的腔室,两个腔室分别为靠近悬臂一端的第一腔室和靠近底盘主体一端的第二腔室;沿悬挂底盘行进方向,位于悬挂底盘前端的两个悬挂单元的第一腔室相互连通,位于悬挂底盘后端的两个悬挂单元的第一腔室相互连通,位于悬挂底盘同一侧的两个悬挂单元的第二腔室相互连通。
4、作为本实用新型的一种具体实施方式,部分所述的悬挂单元包括电机,用于驱动悬挂单元中的轮组转动。
5、作为本实用新型的一种具体实施方式,每个所述的悬挂单元包括电机,用于驱动悬挂单元中的轮组转动。
6、作为本实用新型的一种具体实施方式,所述悬挂单元的轮组为麦克纳姆轮轮组。
7、作为本实用新型的一种具体实施方式,所述第一腔室或第二腔室之间通过耐压导管连通。
8、作为本实用新型的一种具体实施方式,所述悬挂单元均包括至少两个并联设置的气缸伸缩组件,且两个气缸伸缩组件的第一腔室、第二腔室分别连通。
9、本实用新型的有益效果如下:
10、本实用新型通过特定的连接方式将四个悬挂单元的气缸进行组合,实现了四个悬挂单元的联动,单个悬挂单元的动作会通过气缸内的空气传递到其他三个悬挂单元上并推动其动作,从而达到四个轮组均能紧贴在地面上保持抓地力的效果;同时,气缸具有缓震效果,可以减少底盘的震动幅度,从而使本底盘更适宜于复杂路况,尤其是交叉轴、炮弹坑等崎岖路面,解决传统独立悬挂在此类路面上抓地力不足的问题。
技术特征:
1.一种基于气缸的非独立空气悬挂底盘,其特征在于,包括:
2.根据权利要求1中所述的一种基于气缸的非独立空气悬挂底盘,其特征在于,部分所述的悬挂单元包括电机,用于驱动所述悬挂单元中的轮组转动。
3.根据权利要求1中所述的一种基于气缸的非独立空气悬挂底盘,其特征在于,每个所述的悬挂单元包括电机,用于驱动悬挂单元中的轮组转动。
4.根据权利要求2中所述的一种基于气缸的非独立空气悬挂底盘,其特征在于,所述悬挂单元的轮组为麦克纳姆轮轮组。
5.根据权利要求1中所述的一种基于气缸的非独立空气悬挂底盘,其特征在于,所述第一腔室或第二腔室之间通过耐压导管连通。
6.根据权利要求1中所述的一种基于气缸的非独立空气悬挂底盘,其特征在于,所述悬挂单元均包括至少两个并联设置的气缸伸缩组件,且两个气缸伸缩组件的第一腔室、第二腔室分别连通。
技术总结
本技术公开了一种基于气缸的非独立空气悬挂底盘,包括底盘主体和四个悬挂单元,每个悬挂单元均包括悬臂和气缸伸缩组件,悬臂与底盘主体铰接,气缸伸缩组件的一端与底盘主体铰接、另一端与悬臂铰接,用于推动悬臂绕悬臂与底盘主体的铰接点转动;气缸伸缩组件包括两个由活塞分割形成的储存气体的腔室,分别为靠近悬臂一端的第一腔室和靠近底盘主体一端的第二腔室;沿悬挂底盘行进方向,位于悬挂底盘前端、后端的两个悬挂单元的第一腔室相互连通,位于悬挂底盘同一侧的两个悬挂单元的第二腔室也相互连通。本技术通过特定的连接方式将四个悬挂单元的气缸进行组合,实现了四个悬挂单元的联动,解决传统独立悬挂在凹凸路面上抓地力不足的问题。
技术研发人员:虎赛尼,牛天泽,覃紫航,张瑞杰,雅儒格,冯元和
受保护的技术使用者:虎赛尼
技术研发日:20230324
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!