巡逻机器人底盘及巡逻机器人
本技术涉及机器人制造,更具体地,涉及一种巡逻机器人底盘及巡逻机器人。
背景技术:
1、现有的巡逻机器人通常需要布置外置的驱动电机、减速结构以及转向机构等结构,满足机器人的转向和行走需求,并且容易对轮胎造成磨损,整体布局较为拥挤,
2、同时,现有的巡逻机器人导致预留给底盘预留模块的位置和空间不理想。
3、具体来说:
4、1、现有的四轮差速转向底盘,在原地转向的同时,会对轮胎产生磨损;
5、2、现有的麦克娜姆轮底盘,室外工况生存能力较弱;
6、3、现有的四轮转向或二轮转向底盘,其转向机构需要单独的驱动机构及减速机构,占用底盘空间且成本较高;
7、4、现有的底盘驱动轮,通常需要布置外置的驱动电机、减速结构,占用底盘空间较多。
8、此外,现有的巡逻机器人减震不理想,或者需要设置复杂的减震结构。
技术实现思路
1、本实用新型的一个目的是提供一种巡逻机器人底盘的新技术方案,至少能够解决现有技术中的巡逻机器人结构布局拥挤、空间不理想以及减震不理想等问题。
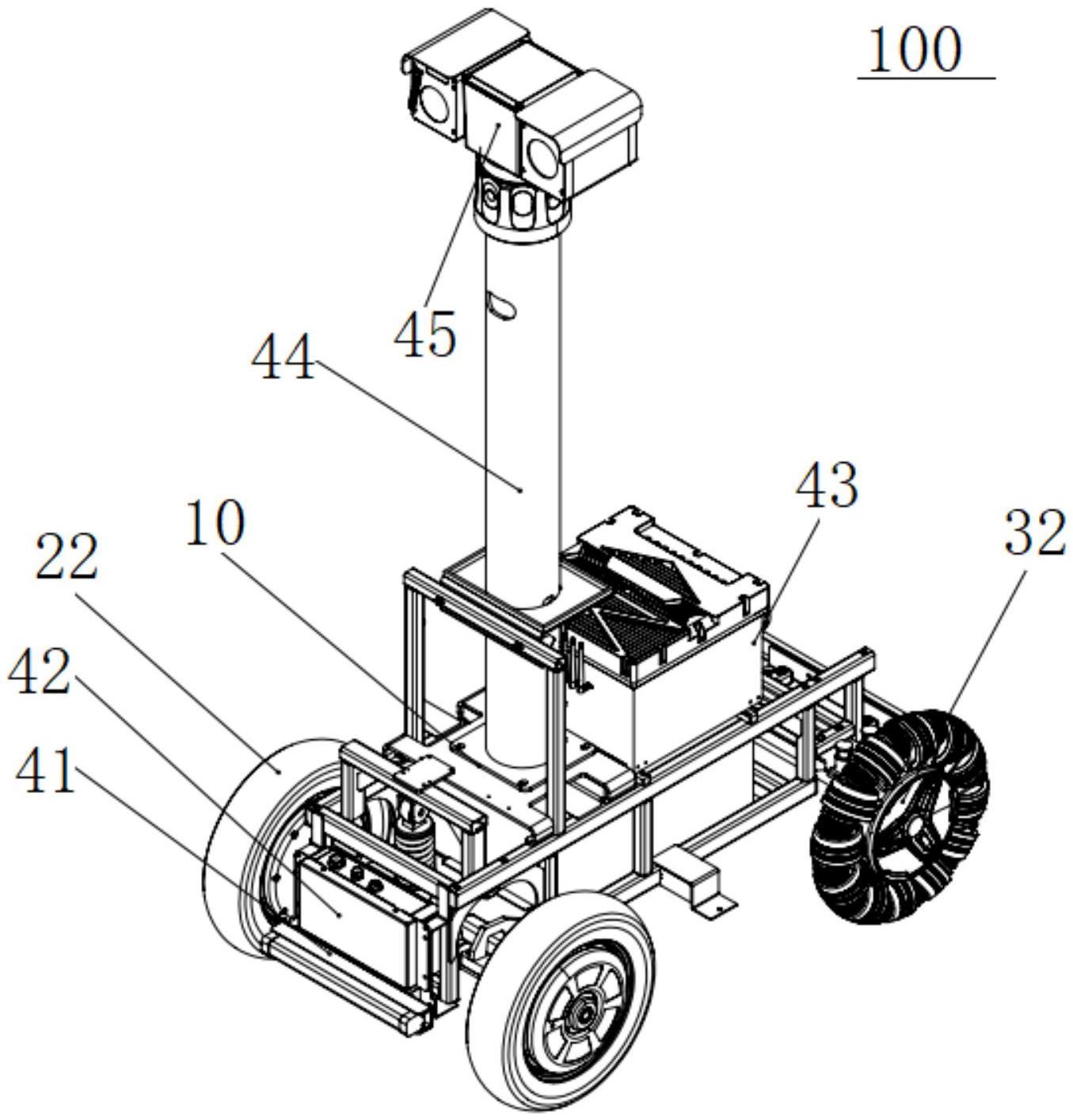
2、本实用新型的第一方面,提供了一种巡逻机器人底盘,包括:车架;前桥组件,所述前桥组件与所述车架连接,所述前桥组件包括:前桥主梁、轮毂电机和第一减震组件,所述前桥主梁设在所述车架底部,所述前桥主梁的相对两端分别设有所述轮毂电机,每个所述轮毂电机构成巡逻机器人的驱动轮,相对传统底盘驱动轮,省去了外置电机及减速机所占用的空间,所述第一减震组件设在所述前桥主梁上,在所述巡逻机器人底盘转向的情况下,两个所述轮毂电机之间形成差速;后桥组件,所述后桥组件与所述车架连接,所述后桥组件和所述前桥组件在所述车架的长度方向上间隔设置,所述后桥组件包括:后轮轴、从动全向轮和第二减震组件,所述后轮轴设在楼所述车架底部,所述后轮轴的相对两端分别设有所述从动全向轮,所述第二减震组件设在所述后轮轴上,以在高度方向上约束所述巡逻机器人底盘。所述两个前轮轮毂电机和所述两个后轮全向轮,在实现底盘近似原地转向功能的同时,避免了轮胎的磨损,也省去了转向机构所占用的空间和成本。并且所用轮胎均可以做成较大轮径的橡胶轮,可以较好得适应室外复杂工况。
3、进一步地,所述前桥组件还包括:第一固定板,所述第一固定板的一侧与所述前桥主梁连接,所述第一固定板的另一侧与所述轮毂电机连接。
4、进一步地,所述第一减震组件包括:铰接座,所述铰接座设在所述前桥主梁上;减震器,所述减震器与所述铰接座连接;前桥摆臂,所述前桥摆臂设在所述前桥主梁上,且所述前桥摆臂位于所述铰接座的相对两侧。
5、进一步地,所述后桥组件还包括:第二固定板,所述第二固定板的相对两侧分别与所述从动全向轮连接,且所述第二固定板的靠近所述从动全向轮的位置与所述后轮轴间隔开形成安装腔,所述第二减震组件设在所述第二固定板上,且一部分位于所述安装腔。
6、进一步地,所述第二减震组件包括:压缩弹簧,所述压缩弹簧设在所述安装腔内;直线轴承,所述直线轴承设在所述第二固定板上;导向销轴,所述导向销轴设在所述直线轴承中,所述导向销轴沿所述直线轴承的轴向可活动,且所述导向销轴的一部分伸入所述安装腔,并与所述压缩弹簧连接。
7、进一步地,所述直线轴承与所述第二固定板螺栓连接,所述从动全向轮与所述后轮轴通过轴承连接,且所述从动全向轮与所述后轮轴之间通过防松螺母和垫片进行固定。
8、进一步地,所述的巡逻机器人底盘还包括:防撞条,所述防撞条设在所述车架的朝向所述前桥组件的一侧,所述防撞条与所述车架螺栓连接。
9、进一步地,所述的巡逻机器人底盘还包括:无线充电器和电控箱,所述无线充电器和所述电控箱间隔开设在所述车架上,所述电控箱设在所述车架的朝向所述后桥组件的一侧。
10、进一步地,所述的巡逻机器人底盘还包括:云台杆,所述云台杆竖直设置在所述车架上;云台组件,所述云台组件设在所述云台杆的远离所述车架的一端。
11、本实用新型的第二方面,提供一种巡逻机器人,包括上述实施例中所述的巡逻机器人底盘。
12、本实用新型的巡逻机器人底盘,在前桥主梁的相对两侧分别设置轮毂电机,通过轮毂电机作为巡逻机器人的驱动轮,省略了外置的驱动电机、减速机构以及转向机构等结构,同时又能保证行走和灵活转向能力,有效节省巡逻机器人底盘的占用空间,有利于巡逻机器人底盘为其他功能模块预留出合理的空间。同时,该巡逻机器人底盘能够在转向时,两个轮毂电机在同向旋转的基础上形成一定的差速,便于巡逻机器人底盘的转向、掉头等,并且不需要磨损轮胎。此外,该巡逻机器人底盘具有良好的减震效果,有利于适应复杂工况。
13、通过以下参照附图对本实用新型的示例性实施例的详细描述,本实用新型的其它特征及其优点将会变得清楚。
技术特征:
1.一种巡逻机器人底盘,其特征在于,包括:
2.根据权利要求1所述的巡逻机器人底盘,其特征在于,所述前桥组件还包括:第一固定板,所述第一固定板的一侧与所述前桥主梁连接,所述第一固定板的另一侧与所述轮毂电机连接。
3.根据权利要求1所述的巡逻机器人底盘,其特征在于,所述第一减震组件包括:
4.根据权利要求1所述的巡逻机器人底盘,其特征在于,所述后桥组件还包括:第二固定板,所述第二固定板的相对两侧分别与所述从动全向轮连接,且所述第二固定板的靠近所述从动全向轮的位置与所述后轮轴间隔开形成安装腔,所述第二减震组件设在所述第二固定板上,且一部分位于所述安装腔。
5.根据权利要求4所述的巡逻机器人底盘,其特征在于,所述第二减震组件包括:
6.根据权利要求5所述的巡逻机器人底盘,其特征在于,所述直线轴承与所述第二固定板螺栓连接,所述从动全向轮与所述后轮轴通过轴承连接,且所述从动全向轮与所述后轮轴之间通过防松螺母和垫片进行固定。
7.根据权利要求1所述的巡逻机器人底盘,其特征在于,还包括:防撞条,所述防撞条设在所述车架的朝向所述前桥组件的一侧,所述防撞条与所述车架螺栓连接。
8.根据权利要求1所述的巡逻机器人底盘,其特征在于,还包括:无线充电器和电控箱,所述无线充电器和所述电控箱间隔开设在所述车架上,所述电控箱设在所述车架的朝向所述后桥组件的一侧。
9.根据权利要求1所述的巡逻机器人底盘,其特征在于,还包括:
10.一种巡逻机器人,其特征在于,包括权利要求1-9中任一项所述的巡逻机器人底盘。
技术总结
本技术公开了一种巡逻机器人底盘及巡逻机器人,巡逻机器人底盘包括:车架;前桥组件,前桥组件与车架连接,前桥组件包括:前桥主梁、轮毂电机和第一减震组件,前桥主梁设在车架底部,前桥主梁的相对两端分别设有轮毂电机,每个轮毂电机构成巡逻机器人的驱动轮,第一减震组件设在前桥主梁上,在巡逻机器人底盘转向的情况下,两个轮毂电机之间形成差速;后桥组件,后桥组件与车架连接,后桥组件和前桥组件在车架的长度方向上间隔设置,后桥组件包括:后轮轴、从动全向轮和第二减震组件,后轮轴设在楼车架底部,后轮轴的相对两端分别设有从动全向轮,第二减震组件设在后轮轴上,以在高度方向上约束巡逻机器人底盘。
技术研发人员:王岩博,刘彪,周宇翔,贺宁
受保护的技术使用者:西安建筑科技大学
技术研发日:20230329
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!