一种无人驾驶车辆的双液压制动系统的制作方法
本技术涉及液压制动系统,更具体的说涉及一种无人驾驶车辆的双液压制动系统。
背景技术:
1、自动驾驶,又称为无人驾驶,是依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动地操作交通工具。
2、目前,现有无人驾驶车辆一般为两套刹车系统,其具有以下缺点:在自动驾驶时人工无法介入,在人工驾驶时电脑也无法介入。一些无人驾驶车辆并没有人工介入的系统,毕竟现有的自动驾驶技术还无法完全满足城市道路的复杂路况,所以在紧急情况下还是需要人工介入的。自动驾驶时人工若是无法介入或者没有人工介入的机构的话会对车辆乘员造成很大风险。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种无人驾驶车辆的双液压制动系统,该无人驾驶车辆的双液压制动系统能够在自动制动和人工制动之间来回切换的目的,起效时间无延迟,成本低廉,结构简单,维护方便,安全系数相对较高。
2、为实现上述目的,本实用新型提供了如下技术方案:
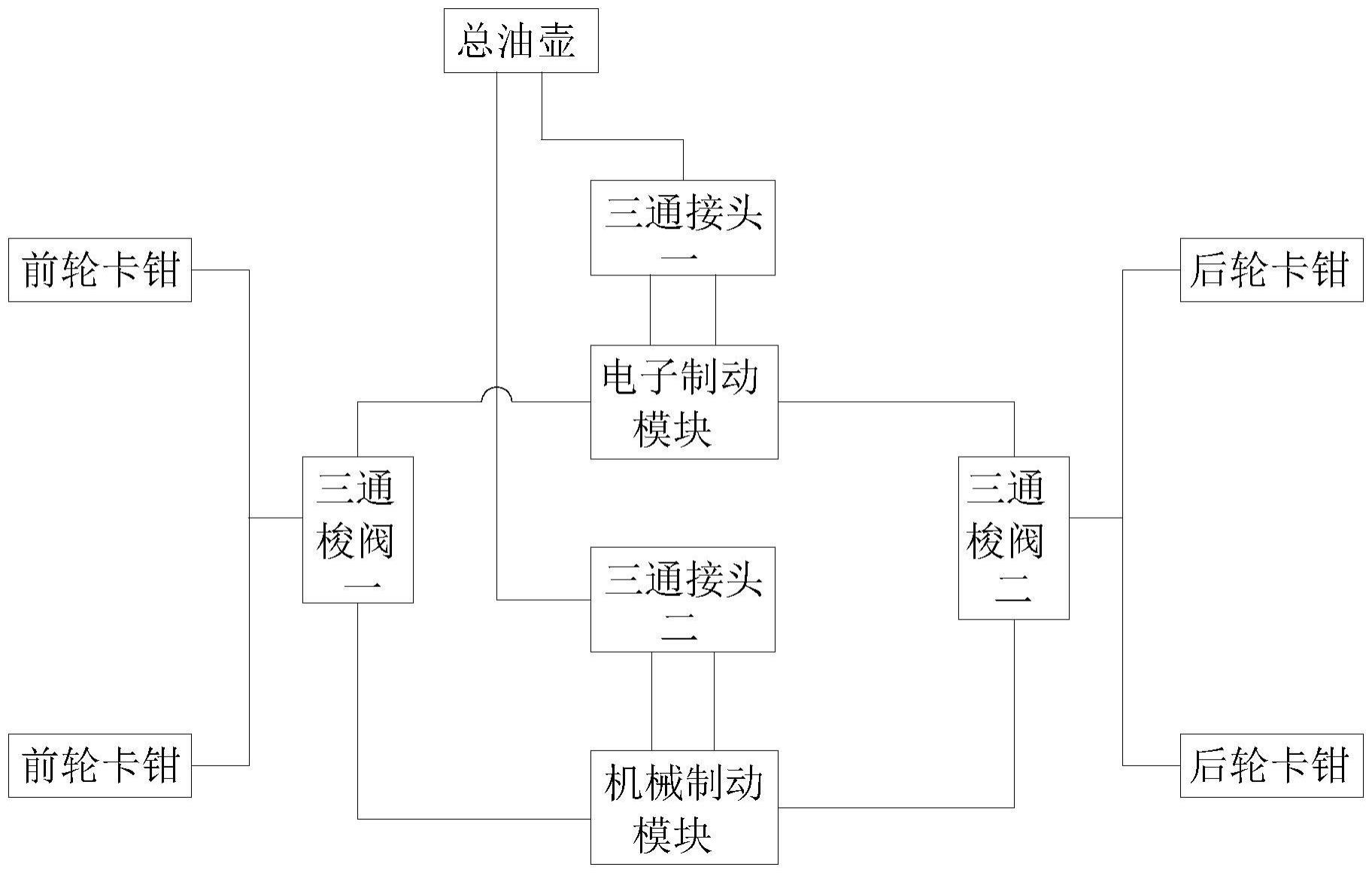
3、一种无人驾驶车辆的双液压制动系统,包括总油壶、机械制动进油路、电子制动进油路、机械制动模块、电子制动模块、机械制动出油路、电子制动出油路和前后轮卡钳,其中总油壶通过机械制动进油路与机械制动模块连通,通过电子制动进油路与电子制动模块连通,所述机械制动模块通过机械制动出油路与前后轮卡钳连通,电子制动模块通过电子制动出油路与前后轮卡钳连通,并且其中机械制动出油路、电子制动出油路与前后轮卡钳之间通过三通梭阀连通。
4、进一步所述机械制动进油路包括机械主路进油管、两个机械分路进油管和三通接头一,所述机械主路进油管一端与总油壶连通,另一端通过三通接头一与两个机械分路进油管连通,两个机械分路进油管分别与机械制动模块连通。
5、进一步所述电子制动进油路包括电子主路进油管、两个电子分路进油管和三通接头二,所述电子主路进油管一端与总油壶连通,另一端通过三通接头二与两个电子分路进油管连通,两个电子分路进油管分别与电子制动模块连通。
6、进一步所述前后轮卡钳包括前轮卡钳和后轮卡钳,所述三通梭阀包括三通梭阀一和三通梭阀二,所述机械制动出油路包括机械前轮出油管和机械后轮出油管,所述电子制动出油路包括电子前轮出油管和电子后轮出油管,所述机械制动出油管和电子前轮出油管通过三通梭阀一与前轮卡钳连通,所述机械后轮出油管和电子后轮出油管通过三通梭阀二与后轮卡钳连通。
7、与现有技术相比,本实用新型的有益效果是:
8、本双液压制动系统,两套制动系统(机械制动系统和电子制动系统)共用一个总油壶,总油壶分两套油路,一套给电子制动系统,另一套给人工制动系统,通过三通梭阀来达到在自动制动和人工制动之间来回切换的目的,起效时间无延迟,成本低廉,结构简单,维护方便,安全系数相对较高。
技术特征:
1.一种无人驾驶车辆的双液压制动系统,其特征在于:包括总油壶、机械制动进油路、电子制动进油路、机械制动模块、电子制动模块、机械制动出油路、电子制动出油路和前后轮卡钳,其中总油壶通过机械制动进油路与机械制动模块连通,通过电子制动进油路与电子制动模块连通,所述机械制动模块通过机械制动出油路与前后轮卡钳连通,电子制动模块通过电子制动出油路与前后轮卡钳连通,并且其中机械制动出油路、电子制动出油路与前后轮卡钳之间通过三通梭阀连通。
2.根据权利要求1所述的一种无人驾驶车辆的双液压制动系统,其特征在于:所述机械制动进油路包括机械主路进油管、两个机械分路进油管和三通接头一,所述机械主路进油管一端与总油壶连通,另一端通过三通接头一与两个机械分路进油管连通,两个机械分路进油管分别与机械制动模块连通。
3.根据权利要求1所述的一种无人驾驶车辆的双液压制动系统,其特征在于:所述电子制动进油路包括电子主路进油管、两个电子分路进油管和三通接头二,所述电子主路进油管一端与总油壶连通,另一端通过三通接头二与两个电子分路进油管连通,两个电子分路进油管分别与电子制动模块连通。
4.根据权利要求1所述的一种无人驾驶车辆的双液压制动系统,其特征在于:所述前后轮卡钳包括前轮卡钳和后轮卡钳,所述三通梭阀包括三通梭阀一和三通梭阀二,所述机械制动出油路包括机械前轮出油管和机械后轮出油管,所述电子制动出油路包括电子前轮出油管和电子后轮出油管,所述机械前轮出油管和电子前轮出油管通过三通梭阀一与前轮卡钳连通,所述机械后轮出油管和电子后轮出油管通过三通梭阀二与后轮卡钳连通。
技术总结
本技术公开了一种无人驾驶车辆的双液压制动系统,包括总油壶、机械制动进油路、电子制动进油路、机械制动模块、电子制动模块、机械制动出油路、电子制动出油路和前后轮卡钳,其中总油壶通过机械制动进油路与机械制动模块连通,通过电子制动进油路与电子制动模块连通,所述机械制动模块通过机械制动出油路与前后轮卡钳连通,电子制动模块通过电子制动出油路与前后轮卡钳连通,并且其中机械制动出油路、电子制动出油路与前后轮卡钳之间通过三通梭阀连通;该无人驾驶车辆的双液压制动系统能够在自动制动和人工制动之间来回切换的目的,起效时间无延迟,成本低廉,结构简单,维护方便,安全系数相对较高。
技术研发人员:龚龙辉,阮璞,徐金良,黄兵
受保护的技术使用者:嘉兴领鹿特种车辆有限公司
技术研发日:20230504
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!