自动定位三角垫木的挡车器的制作方法
本技术涉及车辆限制器械的,具体而言,涉及自动定位三角垫木的挡车器。
背景技术:
1、槽罐车在装卸作业时,因自身重量的变化或者地面不平的原因导致车辆溜车引起的装卸设备拉断损坏,从而造成更严重的安全事故。
2、目前传统阻止槽罐车溜车的办法都是用人工手动在槽罐车的轮胎下面塞上三角垫木的方法,来防止槽罐车溜车事故,但是弊端也很明显,不仅使用不方便,经常会有人忘记塞三角垫木的情况,还有忘记移开三角垫木就把槽罐车开动的情况等等。
技术实现思路
1、本实用新型的目的在于提供自动定位三角垫木的挡车器,旨在解决现有技术中,人工手动安置三角垫木阻车过于繁琐且缺乏安全的问题。
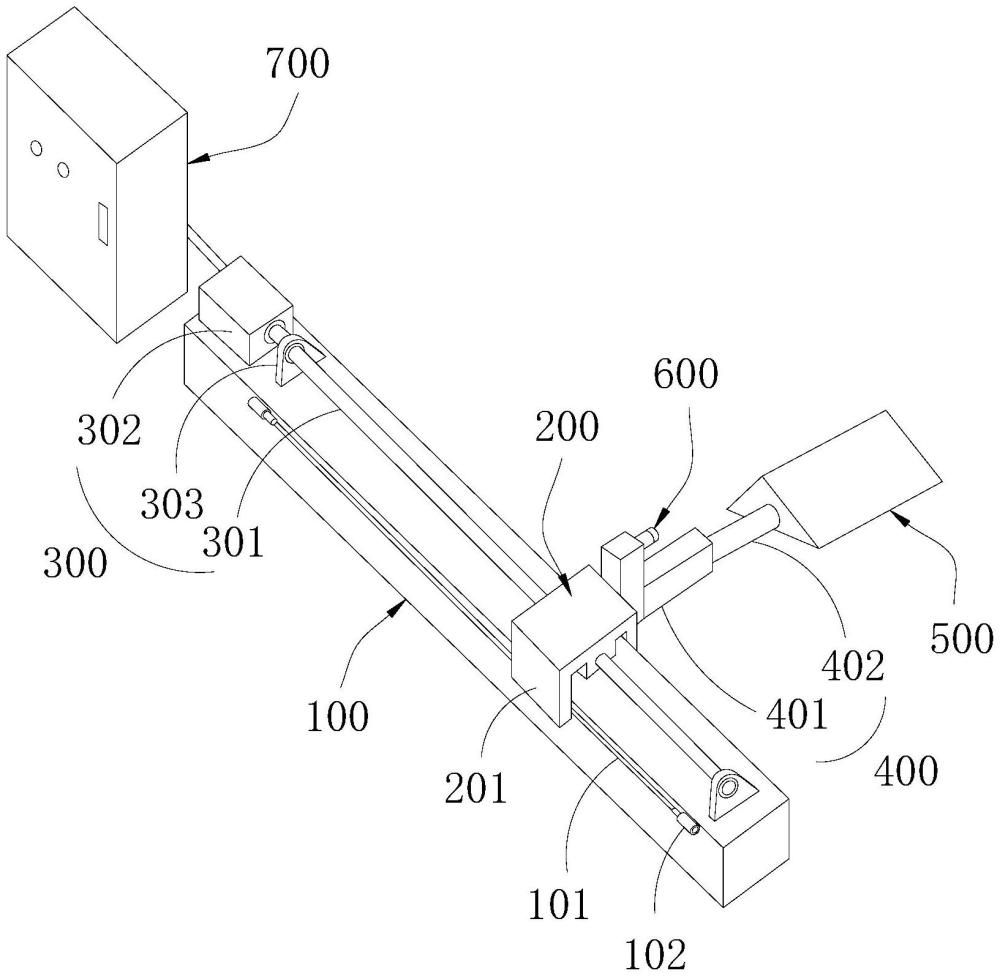
2、本实用新型是这样实现的,自动定位三角垫木的挡车器,包括基座以及相对于基座呈水平移动的滑座,所述基座上设有驱动滑座水平往复移动的驱动机构;所述滑座上设有驱动三角垫木定位的伸缩制动机构,所述伸缩制动机构上电性连接有检测车轮的车轮智能识别相机,所述车轮智能识别相机连接有控制器,所述控制器与驱动机构电性连接。
3、进一步的,所述伸缩制动机构包括气缸以及伸缩移动的推动杆,所述推动杆的外端与三角垫木连接,所述推动杆的内端与气缸连接,所述气缸安装于滑座上,所述车轮智能识别相机位于滑座与气缸之间。
4、进一步的,所述驱动机构包括驱动滑座水平往复移动的丝杆以及驱动丝杆转动的伺服电机,所述伺服电机与控制器电性连接;所述丝杆的两端上分别安装有轴承座,两个所述轴承座之间呈水平相对间隔布置,所述轴承座设置于基座上。
5、进一步的,所述基座的两侧分别设有供滑座定向移动的轨道槽,所述轨道槽延伸滑座的长度方向延伸布置,所述滑座上的两侧分别具有朝向轨道槽延伸布置的滑动壁,所述滑动壁与轨道槽活动抵接。
6、进一步的,所述基座上设有与伺服电机电性连接的限位开关,所述限位开关位于基座的外侧上,且所述限位开关与滑动壁呈水平相对布置。
7、进一步的,所述滑座的底部与基座的顶部之间具有滑动间隙。
8、进一步的,所述三角垫木上具有朝上倾斜布置且朝内凹陷的抵压端面,所述抵压端面上设有润滑层。
9、进一步的,所述三角垫木的底部具有摩擦层,且所述摩擦层与地面之间具有移动间隙。
10、进一步的,所述三角垫木中具有横向布置且弹性伸缩的移动轮,所述移动轮的外侧显露于三角垫木的底部外且位于移动间隙中,所述移动轮的外侧活动抵压在地面上。
11、进一步的,所述移动轮上设有带动移动轮弹性伸缩的转轴,所述转轴位于三角垫木中,所述转轴的一端沿着移动轮的中部贯穿,所述转轴上设有纵向布置且驱动移动轮弹性伸缩的复位弹簧。
12、与现有技术相比,本实用新型提供的自动定位三角垫木的挡车器,控制器通过车轮智能识别相机对来往车辆位置进行检测,再通过驱动机构驱动滑座移动至设定位置,伸缩制动机构驱动三角垫木移动至车轮前,防止车辆出现跑车事故;解决了人工手动安置三角垫木阻车过于繁琐且缺乏安全的问题。
技术特征:
1.自动定位三角垫木的挡车器,其特征在于,包括基座以及相对于基座呈水平移动的滑座,所述基座上设有驱动滑座水平往复移动的驱动机构;所述滑座上设有驱动三角垫木定位的伸缩制动机构,所述伸缩制动机构上电性连接有检测车轮的车轮智能识别相机,所述车轮智能识别相机连接有控制器,所述控制器与驱动机构电性连接。
2.如权利要求1所述的自动定位三角垫木的挡车器,其特征在于,所述伸缩制动机构包括气缸以及伸缩移动的推动杆,所述推动杆的外端与三角垫木连接,所述推动杆的内端与气缸连接,所述气缸安装于滑座上,所述车轮智能识别相机位于滑座与气缸之间。
3.如权利要求2所述的自动定位三角垫木的挡车器,其特征在于,所述驱动机构包括驱动滑座水平往复移动的丝杆以及驱动丝杆转动的伺服电机,所述伺服电机与控制器电性连接;所述丝杆的两端上分别安装有轴承座,两个所述轴承座之间呈水平相对间隔布置,所述轴承座设置于基座上。
4.如权利要求3所述的自动定位三角垫木的挡车器,其特征在于,所述基座的两侧分别设有供滑座定向移动的轨道槽,所述轨道槽延伸滑座的长度方向延伸布置,所述滑座上的两侧分别具有朝向轨道槽延伸布置的滑动壁,所述滑动壁与轨道槽活动抵接。
5.如权利要求4所述的自动定位三角垫木的挡车器,其特征在于,所述基座上设有与伺服电机电性连接的限位开关,所述限位开关位于基座的外侧上,且所述限位开关与滑动壁呈水平相对布置。
6.如权利要求1至5任一项所述的自动定位三角垫木的挡车器,其特征在于,所述滑座的底部与基座的顶部之间具有滑动间隙。
7.如权利要求1至5任一项所述的自动定位三角垫木的挡车器,其特征在于,所述三角垫木上具有朝上倾斜布置且朝内凹陷的抵压端面,所述抵压端面上设有润滑层。
8.如权利要求7所述的自动定位三角垫木的挡车器,其特征在于,所述三角垫木的底部具有摩擦层,且所述摩擦层与地面之间具有移动间隙。
9.如权利要求1至5任一项所述的自动定位三角垫木的挡车器,其特征在于,所述三角垫木中具有横向布置且弹性伸缩的移动轮,所述移动轮的外侧显露于三角垫木的底部外且位于移动间隙中,所述移动轮的外侧活动抵压在地面上。
10.如权利要求9所述的自动定位三角垫木的挡车器,其特征在于,所述移动轮上设有带动移动轮弹性伸缩的转轴,所述转轴位于三角垫木中,所述转轴的一端沿着移动轮的中部贯穿,所述转轴上设有纵向布置且驱动移动轮弹性伸缩的复位弹簧。
技术总结
本技术涉及车辆限制器械的技术领域,公开了自动定位三角垫木的挡车器,包括基座以及相对于基座呈水平移动的滑座,基座上设有驱动滑座水平往复移动的驱动机构;滑座上设有驱动三角垫木定位的伸缩制动机构,伸缩制动机构上电性连接有检测车轮的车轮智能识别相机,车轮智能识别相机连接有控制器,控制器与驱动机构电性连接;控制器通过车轮智能识别相机对来往车辆位置进行检测,再通过驱动机构驱动滑座移动至设定位置,伸缩制动机构驱动三角垫木移动至车轮前,防止车辆出现跑车事故;解决了人工手动安置三角垫木阻车过于繁琐且缺乏安全的问题。
技术研发人员:刘苏,熊春波,万玖聪,黄冠
受保护的技术使用者:深圳市奥图威尔科技有限公司
技术研发日:20230718
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!