车辆驾驶辅助方法、装置、设备及存储介质与流程
本技术涉及汽车,尤其涉及智能驾驶,具体涉及一种车辆驾驶辅助方法、装置、设备及存储介质。
背景技术:
1、用户在驾驶车辆的行驶过程中,会遇到很多绕障的场景,包括故障车辆、施工现场等。
2、相关技术中多为针对故障车辆这种大型障碍物生成的绕障决策,也即针对单个目标进行识别,生成针对单个目标的绕障决策。而一般在施工现场等场景中,会通过锥桶、水马等小型标识物包围施工现场,锥桶一般长宽约为0.5米,相比于车辆、车道宽度而言为小型障碍物,且单个锥桶或者水马出现的几率较小,通常伴随着多个锥桶/水马形成锥桶/水马群,标识一块无法通行的区域。
3、对于密集的小型障碍物群,如果只针对纵向最近的障碍物做绕障决策,很容易受到其他同属一块区域的小型障碍物的干扰,导致选中的障碍物目标来回切换,进而影响绕障决策的正确性,无法给用户提供准确的驾驶辅助信息。
技术实现思路
1、本技术的目的之一在于提供一种车辆驾驶辅助方法、装置、设备及存储介质,用于实现针对多个小型障碍物,提出合理的绕障决策,辅助用户驾驶车辆通过障碍区域。
2、为了实现上述目的,本技术采用的技术方案如下:
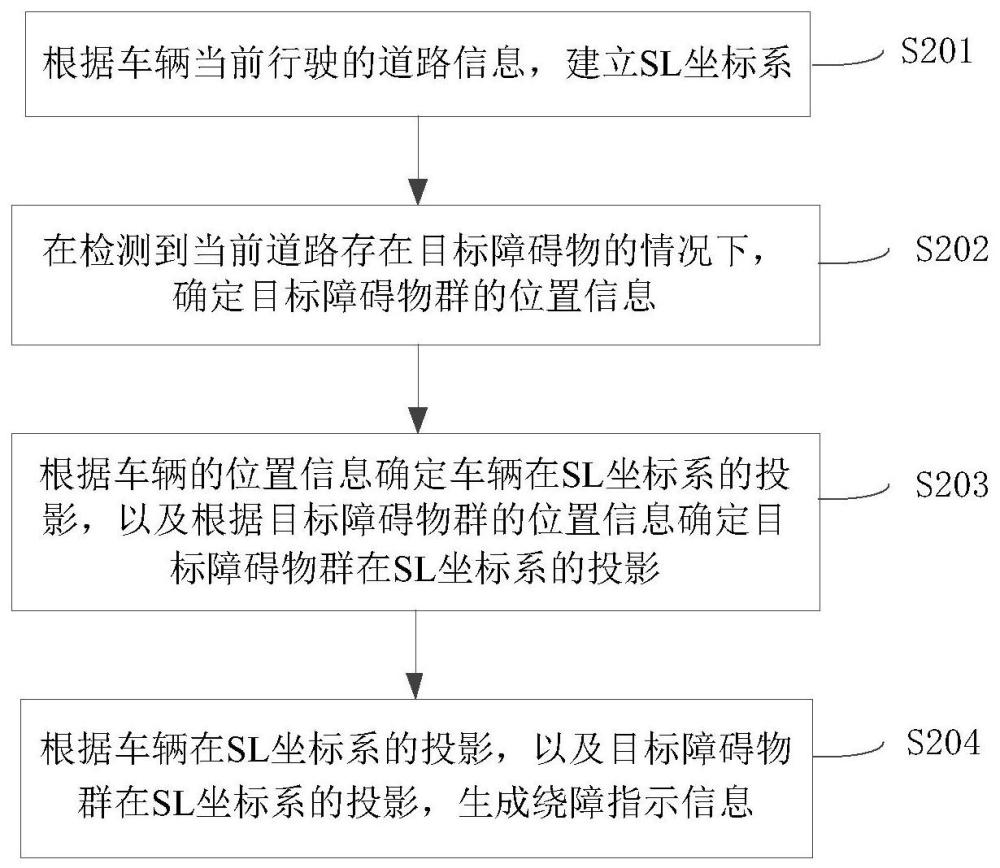
3、根据本技术涉及的第一方面,提供一种车辆驾驶辅助方法,包括:车辆驾驶辅助装置根据车辆当前行驶的道路信息,建立sl坐标系;并在检测到当前道路存在目标障碍物的情况下,确定目标障碍物群的位置信息,目标障碍物群包括多个目标障碍物。进一步的,车辆驾驶辅助装置根据车辆的位置信息确定车辆在sl坐标系的投影,以及根据目标障碍物群的位置信息确定目标障碍物群在sl坐标系的投影,并根据车辆在sl坐标系的投影以及目标障碍物群在sl坐标系的投影,生成绕障指示信息,绕障指示信息用于指示避开目标障碍物群的车辆行驶路线。
4、根据上述技术手段,本技术提供的车辆驾驶辅助方法中,车辆驾驶辅助装置根据车辆当前行驶的道路信息,建立sl坐标系,并在检测到当前道路存在目标障碍物的情况下,基于锥桶和水马的特性,确定当前道路上的目标障碍物群,进而基于车辆在sl坐标系中的投影,以及目标障碍物群在sl坐标系中投影出的区域,生成绕障指示信息,以辅助用户驾驶车辆基于绕障指示信息指示的车辆行驶路线通过目标障碍物群,由此实现了避免在道路中存在多个小型障碍物的情况下,针对单个进行绕障决策的执行,既降低了进行绕障决策时的无用计算,又避免了出现针对单个小型障碍物生成的绕障决策不合理的情况。
5、在一种可能的实施方式中,在检测到当前道路存在目标障碍物的情况下,车辆驾驶辅助装置确定目标障碍物群,包括:在检测到当前道路存在目标障碍物的情况下,确定第一目标障碍物,第一目标障碍物为与车辆在sl坐标系的s方向距离最近的目标障碍物;根据第一目标障碍物,确定多个第二目标障碍物,多个第二目标障碍物中相邻两个目标障碍物满足第一预设条件,第一预设条件包括在s方向的距离小于第一距离,在sl坐标系的l方向的距离小于第二距离,多个第二目标障碍物中包括至少一个第三目标障碍物,第三目标障碍物与第一目标障碍物满足第一预设条件;根据第一目标障碍物的位置信息以及多个第二目标障碍物的位置信息,确定目标障碍物群的位置信息。
6、根据上述技术手段,本技术实现了在检测到当前到存在目标障碍物的情况下,识别影响车辆行驶的目标障碍物群,并确定目标障碍物群的位置信息,以使得后续基于该确定到的目标障碍物群的位置信息,进行绕障决策。
7、在一种可能的实施方式中,上述车辆驾驶辅助装置根据第一目标障碍物,确定多个第二目标障碍物,包括:根据第一目标障碍物以及第一预设条件,确定至少一个第三目标障碍物;根据至少一个第三目标障碍物,以及第一预设条件,依次遍历得到多个第四目标障碍物;将至少一个第三目标障碍物以及多个第四目标障碍物确定为多个第二目标障碍物。
8、在一种可能的实施方式中,在车辆驾驶辅助装置确定目标障碍物群之后,车辆驾驶辅助方法还包括:在目标障碍物群在sl坐标系中的投影为预设形状的情况下,确定在当前道路中是否存在除目标障碍物群中包括的目标障碍物以外的第五目标障碍物;在当前道路中存在第五目标障碍物的情况下,确定目标障碍物群中是否存在第六目标障碍物,第五目标障碍物与第六目标障碍物满足第二预设条件,第二预设条件包括在s方向上的距离小于第三距离,在l方向的距离小于第四距离,第三距离大于第一距离,第四距离大于第二距离;在目标障碍物群中存在第六目标障碍物的情况下,基于第五目标障碍物的位置信息,更新目标障碍物群的位置信息。
9、根据上述技术手段,由于凹轮廓状的目标障碍物群,可能会出现设置距离偏大的情况,本技术实现了在当前道路还存在有未确定为目标障碍物群中的目标障碍物的情况下,基于更大的距离阈值确定是否同属于一个目标障碍物群,避免后续生成错误的绕障指示信息,导致无法通过障碍区域。
10、根据本技术提供的第二方面,提供一种车辆驾驶辅助装置,包括处理单元以及确定单元。处理单元,用于根据车辆当前行驶的道路信息,建立sl坐标系。确定单元,用于在检测到当前道路存在目标障碍物的情况下,确定目标障碍物群的位置信息,目标障碍物群包括多个目标障碍物。确定单元,还用于根据车辆的位置信息确定车辆在sl坐标系的投影,以及根据目标障碍物群的位置信息确定目标障碍物群在sl坐标系的投影。处理单元,还用于根据车辆在sl坐标系的投影以及目标障碍物群在sl坐标系的投影,生成绕障指示信息,绕障指示信息用于指示避开目标障碍物群的车辆行驶路线。
11、在一种可能的实施方式中,确定单元,具体用于在检测到当前道路存在目标障碍物的情况下,确定第一目标障碍物,第一目标障碍物为与车辆在sl坐标系的s方向距离最近的目标障碍物。根据第一目标障碍物,确定多个第二目标障碍物,多个第二目标障碍物中相邻两个目标障碍物满足第一预设条件,第一预设条件包括在s方向的距离小于第一距离,在sl坐标系的l方向的距离小于第二距离,多个第二目标障碍物中包括至少一个第三目标障碍物,第三目标障碍物与第一目标障碍物满足第一预设条件。根据第一目标障碍物的位置信息以及多个第二目标障碍物的位置信息,确定目标障碍物群的位置信息。
12、在一种可能的实施方式中,确定单元,具体用于根据第一目标障碍物以及第一预设条件,确定至少一个第三目标障碍物。根据至少一个第三目标障碍物,以及第一预设条件,依次遍历得到多个第四目标障碍物。将至少一个第三目标障碍物以及多个第四目标障碍物确定为多个第二目标障碍物。
13、在一种可能的实施方式中,确定单元,还用于在目标障碍物群在sl坐标系中的投影为预设形状的情况下,确定在当前道路中是否存在除目标障碍物群中包括的目标障碍物以外的第五目标障碍物。在当前道路中存在第五目标障碍物的情况下,确定目标障碍物群中是否存在第六目标障碍物,第五目标障碍物与第六目标障碍物满足第二预设条件,第二预设条件包括在s方向上的距离小于第三距离,在l方向的距离小于第四距离,第三距离大于第一距离,第四距离大于第二距离。在目标障碍物群中存在第六目标障碍物的情况下,基于第五目标障碍物的位置信息,更新目标障碍物群的位置信息。
14、根据本技术提供的第三方面,提供一种车辆驾驶辅助设备,部署于车辆。车辆驾驶辅助设备包括存储器和处理器,存储器和处理器耦合;存储器用于存储计算机程序代码,计算机程序代码包括计算机指令;当处理器执行计算机指令时,车辆驾驶辅助设备执行上述第一方面及其任一种可能的实施方式提供的车辆驾驶辅助方法。
15、根据本技术提供的第四方面,提供一种计算机可读存储介质,计算机可读存储介质中存储有指令,当指令在车辆驾驶辅助设备上运行时,使得车辆驾驶辅助设备执行上述第一方面及其任一种可能的实施方式提供的车辆驾驶辅助方法。
16、根据本技术提供的第五方面,提供一种车辆,包括上述第三方面提供的车辆驾驶辅助设备。
17、根据本技术提供的第六方面,提供一种计算机程序产品,计算机程序产品包括计算机指令,当计算机指令在在车辆驾驶辅助设备上运行时,使得车辆驾驶辅助设备执行上述第一方面及其任一种可能的实施方式提供的车辆驾驶辅助方法。
18、由此,本技术的上述技术特征具有以下有益效果:
19、(1)本技术提供的车辆驾驶辅助方法中,车辆驾驶辅助装置根据车辆当前行驶的道路信息,建立sl坐标系,并在检测到当前道路存在目标障碍物的情况下,基于锥桶和水马的特性,确定当前道路上的目标障碍物群,进而基于车辆在sl坐标系中的投影,以及目标障碍物群在sl坐标系中投影出的区域,生成绕障指示信息,以辅助用户驾驶车辆通过目标障碍物群,由此实现了避免在道路中存在多个小型障碍物的情况下,针对单个进行绕障决策的执行,既降低了进行绕障决策时的无用计算,又避免了出现针对单个小型障碍物生成的绕障决策不合理的情况。
20、(2)由于凹轮廓状的目标障碍物群,可能会出现设置距离偏大的情况,本技术实现了在当前道路还存在有未确定为目标障碍物群中的目标障碍物的情况下,基于更大的距离确定是否同属于一个目标障碍物群,避免后续生成错误的绕障指示信息,导致无法通过障碍区域。
21、需要说明的是,第二方面至第六方面中的任一种实现方式所带来的技术效果可参见第一方面中对应实现方式所带来的技术效果,此处不再赘述。
22、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!