一种电动汽车短期能耗预测方法
本发明属于新能源汽车,具体涉及一种基于道路交通信息和驾驶行为特征的电动汽车短期能耗预测方法。
背景技术:
1、电动汽车相比于传统燃油汽车,具有动力性强、噪声小、结构简单以及零排放等优点,但受限于电池技术,电动汽车的实际续航里程一直是备受关注的问题。尽管现在的电动汽车所采用的动力电池能量密度和容量不断提高,充电技术和基础设施不断完善,“里程焦虑”问题仍然是困扰消费者选择购买电动汽车的主要原因之一。因此,电动汽车需要对未来行驶的能耗进行精确的预测,一方面可以为驾驶员提供准确的剩余行驶里程数据,以便于驾驶员提前计划充电地点和充电时间,在一定程度上缓减驾驶员的“里程焦虑”;另一方面,准确的能耗预测可以帮助智能电动汽车进行低能耗路线的规划,提高实际续航里程;此外,准确的电动汽车预测能耗也可以帮助纯电动汽车电池管理系统对电能的输出与制动能量回收进行优化,提高电能的利用效率。
2、目前相关研究中所提出的电动汽车能耗预测方法主要可以分为两类:基于历史数据的机器学习能耗预测方法和基于车辆动力学模型的能耗预测方法。前者基于驾驶员在特定道路行驶的历史数据或者能耗数据,通过提取其中的驾驶行为特征信息并采用机器学习方法来进行能耗预测,进一步还可以采用深度学习算法以及神经网络模型提高预测的准确性;后者基于纯电动汽车的车辆动力学模型,并考虑行驶路径的地面摩擦系数、坡度等地理信息以及温度、风速、风向等天气信息中对纯电动汽车能耗产生影响的因素,建立能耗或者车速预测模型来进行能耗预测。但这两种方法的优缺点也较为明显。基于历史数据的机器学习能耗预测方法能够较好的反映驾驶员行为对能耗的影响和车辆真实的能耗水平,但当行驶路线和行驶环境发生变化会出现预测偏差,适应性较差。基于车辆动力学模型的能耗预测方法对不同工况具有较好的适应性,但对车速预测的准确性要求较高。
技术实现思路
1、本发明提供一种基于道路交通信息和驾驶行为特征的纯电动汽车短期能耗预测方法,结合两种传统纯电动汽车能耗预测方法的优点并引入交通流信息数据对纯电动汽车的短期能耗进行预测,以提高预测的准确性和适应性,缓解驾驶员的“里程焦虑”问题,并为智能电动汽车的低能耗路径规划以及能量管理策略优化提供有效技术支持。
2、为实现上述技术目的,本发明采用如下技术方案:
3、一种基于道路交通信息和驾驶行为特征的纯电动汽车短期能耗预测方法,包括:
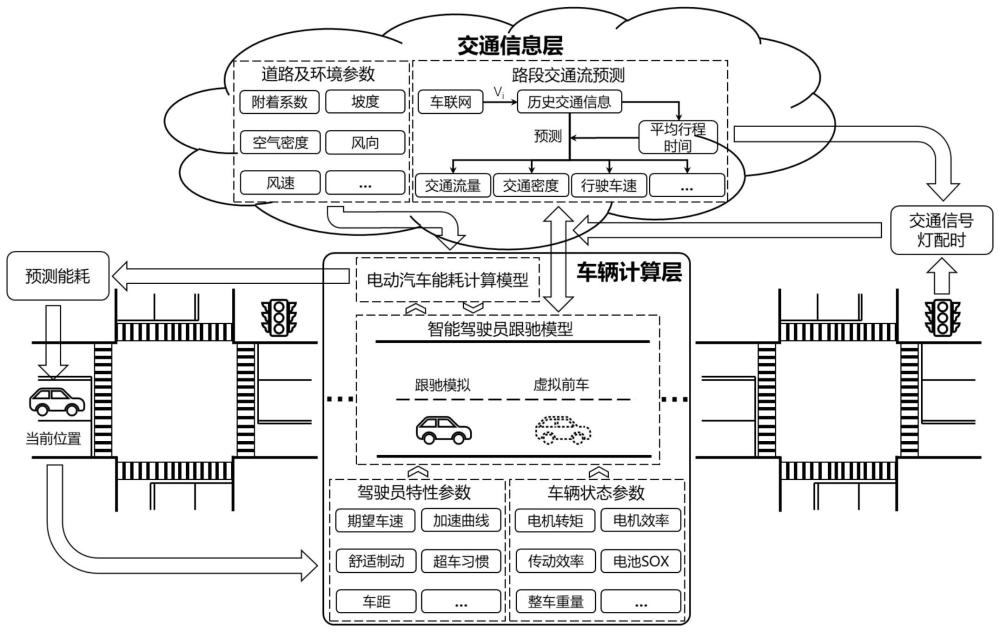
4、首先,从驾驶员行驶的历史数据中提取驾驶员的特征参数,从电动汽车的车辆状态信息中提取动力性参数,结合驾驶员特征参数以及车辆动力性参数对智能驾驶员跟驰模型中的物理参数进行定义和赋值;
5、然后,获取并利用各个路段在不同时间段内的规律性交通流信息,对电动汽车即将要行驶的下一路段的交通流信息进行预测;并基于驾驶员的超车习惯,相应根据驾驶员的期望车速和预测得到的交通流量计算自由交通流密度,再通过将其与预测得到的宏观交通流密度相比较,将电动汽车预测路段的行驶状态分为自由行驶和跟驰行驶;
6、其中,自由行驶时,电动汽车将自由加速至期望车速并行驶到交叉口;跟驰行驶时,在电动汽车前方生成基于交通流信息的虚拟前车,并采用赋值后的智能驾驶员跟驰模型对虚拟前车进行跟驰模拟,获得电动汽车在预测路段行驶的车速;
7、最后,结合道路参数以及环境参数,并采用车辆动力学公式,计算电动汽车在预测路段行驶的预测能耗。
8、进一步的,提取电动汽车的动力性参数包括:电机转矩、电机效率、传动系效率、电池sox状态、整车重量、车辆长度lv、制动系统参数。
9、进一步的,通过车辆动力学公式计算当前电动汽车所能提供的最大加速度amax、最大减速度bmax以及超车能耗与直行加速能耗之比μ(μ>1)。
10、进一步的,道路参数以及环境参数包括:路面的摩擦系数、坡度、空气密度、风向、风速。
11、进一步的,获取并利用各个路段的历史交通流信息,对电动汽车即将要行驶的下一路段的交通流信息进行预测,具体包括:基于历史交通信息并通过交通大数据系统预测下一路段中相同类型电动汽车的宏观交通信息:平均行程时间ts、区间车速va、交通流量qa,并计算预测路段的宏观交通流密度ka:
12、
13、进一步的,提取的驾驶员特征参数包括:期望车速vfree、加速曲线、舒适制动减速度b、制动反应时间td、停车距离s0和超车习惯;
14、期望车速vfree按照如下公式计算:
15、vfree=ζ·vl
16、式中,vl为预测路段的最高限速,ζ为从驾驶员历史行驶数据中统计的驾驶员在不同限速道路中自由行驶时的车速与道路限速的百分比;
17、加速曲线将在智能驾驶员模型中用于拟合驾驶员的加速指数;
18、舒适制动减速度为驾驶员在非紧急情况下保证舒适性制动时的减速度;
19、制动反应时间为驾驶员从发现制动信号到把脚移到制动踏板上所需要的时间;
20、停车间距为前车停车时,后车驾驶员减速至停车后与前车保持的车距;
21、超车习惯包括驾驶员进行超车时与当前车道前车的车距l1、与相邻车道后车的车距l2以及驾驶员的超车概率η,其中,超车概率从历史数据中统计驾驶员实际超车的次数与具备超车空间条件的总次数之比来获得。
22、进一步的,自由交通流密度的计算公式为:
23、
24、式中,kfree为自由交通流密度,qa为预测的交通流量,vfree为期望车速,η为超车概率,lv为车辆长度,l1和l2为驾驶员超车时与前、后车的车距,l为前后车的车距;
25、若计算所得自由交通流密度kfree大于宏观交通流密度ka,则判定电动汽车在预测路段的行驶状态为自由行驶;否则判定电动汽车在预测路段的行驶状态为跟驰行驶。
26、进一步的,自由行驶状态下的智能驾驶员跟驰模型表示为:
27、
28、式中,aacc(t)为电动汽车自由加速至期望车速并行驶到交叉口的加速度,amax为电动汽车的最大加速度,v(t)为电动汽车预测车速,vfree为驾驶员的期望车速;δ为加速指数,采用智能驾驶员模型中的自由加速公式a(t)=amax[1-(v(t)/vfree)δ]与驾驶员历史加速曲线进行拟合获得;λ根据预测路段末端的交通信号灯配时确定:红灯时λ=1;绿灯时λ=0;s0为停车间距;t为车头时距,为安全车头时距ts与驾驶员反应时间td之和;b为舒适制动减速度;s'(t)为电动汽车当前位置与预测路段末端停止线之间的距离;
29、当信号灯为绿灯λ=0时,将预测路段中自由行驶时的加速度调整为aaccf(t),需要满足:
30、
31、同时增加对电动汽车的车速和加速度进行如下约束:
32、
33、进一步的,跟驰行驶状态下的智能驾驶员跟驰模型表示为:
34、
35、式中,aacc(t)为电动汽车的自由加速度,amax为电动汽车的最大加速度,v(t)为电动汽车预测车速,vfree为驾驶员的期望车速;δ为加速指数,采用智能驾驶员模型中的自由加速公式a(t)=amax[1-(v(t)/vfree)δ]与驾驶员历史加速曲线进行拟合获得;s0为停车间距;t为车头时距,为安全车头时距ts与驾驶员反应时间td之和;b为舒适制动减速度;δv(t)为电动汽车与虚拟前车的车速差,即:s(t)为电动汽车与虚拟前车的当前车距,由预测路段的交通流密度kp(t)进行计算:
36、同时增加对电动汽车的车速和加速度进行如下约束:
37、
38、
39、此外,针对介于自由行驶和跟驰行驶边界的“平衡流状态”,即v(t)≈vfree,δv(t)≈0,增加对电动汽车的加速度进行如下约束:
40、
41、
42、
43、进一步的,预测路段的交通流密度kp(t)的计算方法为:
44、首先,基于当前行驶路段末端交叉口的红绿灯配时可以预测出车辆通过该交叉口停车线的时间点tf,则电动汽车到达下一个交叉口的预计时间点tl表示为:
45、tl=tf+ts
46、然后,基于tl查找下一个交叉口的红绿配时,获得在下一个交叉口的红灯或者绿灯剩余时间t',并在历史交通流大数据中检索上一个具有相同红绿灯剩余时间的时间点t'l,则与之对应的路段起点时间点t'f为:
47、t'f=t'l-ts
48、再从车联网中获取时间点t'f进入预测路段的所有车辆在该路段行驶的车速,并计算获得平均车速作为预测路段中的行驶车速,其中i为所统计的车辆;并基于历史交通流信息并通过交通大数据系统预测获得tf至tl时间段内的交通流量qp(t);
49、最后,基于交通流三要素之间的关系计算出预测路段的交通流密度kp(t):
50、
51、进一步的,电动汽车在预测路段行驶的预测能耗ev,其改进计算方式为:
52、ev=ed·[1+η(μ-1)]
53、式中,ed为现有技术中采用车辆动力学公式逆向计算得到电动汽车在预测路段行驶的预测能耗;μ为超车能耗与直行加速能耗之比,η为驾驶员的超车概率,μ属于车辆动力性参数,η属于驾驶员的特征参数。
54、有益效果
55、与现有技术相比,本发明综合了传统基于历史数据的机器学习能耗预测方法和基于车辆动力学模型的能耗预测方法的优点,并至少具有以下优势:
56、(1)相比于整条规划路径的长期能耗预测,对其中每一个路段进行的短期能耗预测实时性更强,对于行驶路线的变换以及交通流状态的变化具有更好的适应性,且能够对长期能耗预测进行及时的调整和补充。
57、(2)相比于采用历史驾驶数据进行预测,该方法不需要完整的行驶历史数据对机器学习算法进行训练,仅需要驾驶行为特征参数即可进行预测,这些参数可以不依赖于数据量即可获得,比如采用小样本统计方法,并且能够使电动汽车的能耗预测更能体现当前驾驶员的特点;同时,相比于微观的车辆速度进行预测,宏观的交通流数据确定性和时空规律性更强,能够进行更加准确地预测。
58、(3)相比于采用车辆动力学模型进行预测,该方法通过交通流预测信息生成虚拟前车并采用智能驾驶员跟驰模型进行预测,搭建了宏观交通流行驶车速与微观车辆车速之间的桥梁,能更准确地反映交通流状态和驾驶员行为特征对电动汽车能耗的影响。
- 还没有人留言评论。精彩留言会获得点赞!