车辆感测系统的制作方法
本发明是有关于一种车辆感测系统,且特别是有关于一种决定转向警示区域的车辆感测系统。
背景技术:
1、在先进驾驶辅助系统(advanced driver assistance system,adas)、自动驾驶技术的蓬勃发展下,车辆感测系统的应用及需求也随之与日俱增。
2、对于四轮以上的车辆而言,特别是大型车辆,例如大客车、货车及联结车,其转弯时会产生后轮往转弯侧偏移的“内轮差”(radius difference between inner wheels)现象,且此处通常为驾驶的视线死角,故对于该侧人车造成相当大的威胁,其中又以右转(向驾驶座的另一侧转弯)车辆承受的风险最甚。
3、综合上述大型车辆的大范围视线死角及内轮差现象两种因素作用下,仅靠倡导之类的提醒仍是让行人或其他车辆暴露在极高风险之下。大型车辆中,又以必须在市区行驶的公交车肇事频率较高,且因乘载人数多时车体较笨重,导致于压过其他车辆时才发现异状,就为时已晚。目前只能被动地倡导摩托车、自行车及行人在道路通行时应尽量远离大型车辆,避免靠近大型车辆四周,遇大型车辆转弯时应与其保持更大的距离,以确保行车安全。
4、因此,当今的车辆感测系统的市场上,亟需发展一种有效由车辆本身,特别是大型车辆本身主动计算出转向警示区域以预防视线死角或内轮差问题造成交通事故的解决方案。
技术实现思路
1、本发明提供一种车辆感测系统,通过其计算单元用以由车辆尺寸数据组及转向数据组决定转向警示区域,且转向警示区域与时间及转向数据组中至少一者相关,以确保车辆转向时周遭的人车安全。
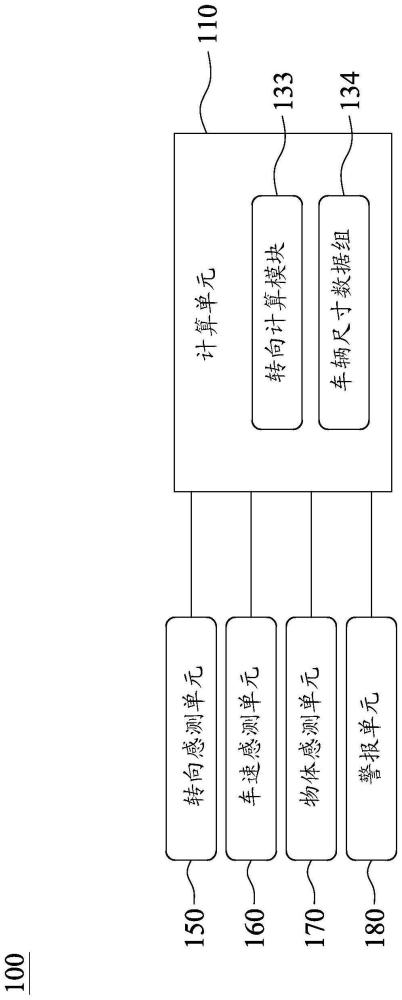
2、依据本发明一实施方式提供一种车辆感测系统,用以设置于车辆,车辆为一体式车辆,车辆包含左前轮、右前轮、左后轮及右后轮,车辆感测系统包含计算单元、转向感测单元及车速感测单元。计算单元包含转向计算模块及车辆尺寸数据组,车辆尺寸数据组包含车辆的轴距及车宽,计算单元用以接收车辆的转向数据组。转向感测单元通信连接计算单元,转向感测单元用以提供车辆的转向数据组予计算单元,转向数据组包含车辆的横摆角速度。车速感测单元通信连接计算单元,车速感测单元用以提供车辆的车速予计算单元。基于转向计算模块,计算单元用以由转向数据组决定内前轮及内后轮,内前轮为左前轮及右前轮中一者,内后轮为左后轮及右后轮中与内前轮同侧的一者。基于转向计算模块,计算单元用以由车辆的横摆角速度及车速决定车辆的横摆角速度相关半径,并由横摆角速度相关半径及后轮相关半径的方向决定圆心、后轮相关半径及前轮相关半径,后轮相关半径为内后轮与圆心的距离,前轮相关半径为内前轮与圆心的距离。基于转向计算模块,计算单元用以由车辆的轴距、车宽、横摆角速度及车速决定转向警示区域,且转向警示区域与时间及转向数据组相关。借此,车辆感测系统可计算出动态的转向警示区域。
3、依据前述车辆感测系统的实施例中,其中基于转向计算模块,计算单元可用以由车辆的横摆角速度及车速决定车辆的横摆角速度相关半径。轴距为ad,车宽为wd,横摆角速度相关半径为r1,车辆的后轮相关半径为r2,其满足下列条件:
4、
5、依据前述车辆感测系统的实施例中,其中后轮相关半径的方向为垂直车辆的侧表面并通过内后轮的方向,横摆角速度相关半径为车辆的轴距中心与圆心的距离。
6、依据前述车辆感测系统的实施例中,其中基于转向计算模块,计算单元可用以由后轮相关半径及前轮相关半径决定转向警示区域。
7、依据前述车辆感测系统的实施例中,可还包含物体感测单元及警报单元。物体感测单元为雷达单元并通信连接计算单元,物体感测单元用以感测位于车辆外的物体相对于车辆的位置。警报单元通信连接计算单元,当物体感测单元所感测到的物体的位置落入转向警示区域,警报单元产生警报信号。
8、借由前述实施方式的车辆感测系统,有助依据车辆的转向程度实时并动态地调整转向警示区域。
技术特征:
1.一种车辆感测系统,其特征在于,用以设置于车辆,该车辆为一体式车辆,该车辆包含左前轮、右前轮、左后轮及右后轮,该车辆感测系统包含:
2.根据权利要求1所述的车辆感测系统,其中基于该转向计算模块,该计算单元用以由该车辆的该横摆角速度及该车速决定该车辆的横摆角速度相关半径;
3.根据权利要求1所述的车辆感测系统,其中该后轮相关半径的方向为垂直该车辆的侧表面并通过该内后轮的方向,该横摆角速度相关半径为该车辆的轴距中心与该圆心的距离。
4.根据权利要求3所述的车辆感测系统,其中基于该转向计算模块,该计算单元用以由该后轮相关半径及该前轮相关半径决定该转向警示区域。
5.根据权利要求4所述的车辆感测系统,还包含:
技术总结
一种车辆感测系统,用以设置于车辆,车辆为一体式车辆,车辆感测系统包含计算单元、转向感测单元及车速感测单元。计算单元包含转向计算模块及车辆尺寸数据组,车辆尺寸数据组包含车辆的轴距及车宽,计算单元用以接收车辆的转向数据组。转向感测单元通信连接计算单元,转向感测单元用以提供车辆的转向数据组予计算单元,转向数据组包含车辆的横摆角速度。车速感测单元通信连接计算单元,车速感测单元用以提供车辆的车速予计算单元。基于转向计算模块,计算单元用以由车辆的轴距、车宽、横摆角速度及车速决定转向警示区域,且转向警示区域与时间及转向数据组相关。借此,车辆感测系统可计算出动态的转向警示区域。
技术研发人员:李俊贤,陈咸闵,钱肇豪,胡毓旺,陈正夫,钟世忠
受保护的技术使用者:为升科科技股份有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!