空气弹簧控制方法、系统及设备与流程
本申请属于空气弹簧控制,尤其涉及一种空气弹簧控制方法、系统及设备。
背景技术:
1、空气弹簧是一种悬挂系统,它使用气囊来替代传统的金属弹簧。这种悬挂系统使用气体(通常是空气)来提供悬挂支撑,而不是传统的金属弹簧或线圈弹簧。
2、现有技术中,空气弹簧的控制主要靠简单的传感数据进行控制,智能化程度较低,导致无法根据不同行车环境进行控制,降低了车辆运行的稳定性、影响乘坐舒适性、增加了车辆维护成本。
技术实现思路
1、本申请实施例提供了一种空气弹簧控制方法、系统及设备,可以解决无法根据不同行车环境控制空气弹簧,导致车辆运行稳定性降低、影响乘坐舒适性、增加车辆维护成本的问题。
2、第一方面,本申请实施例提供了一种空气弹簧控制方法,包括:
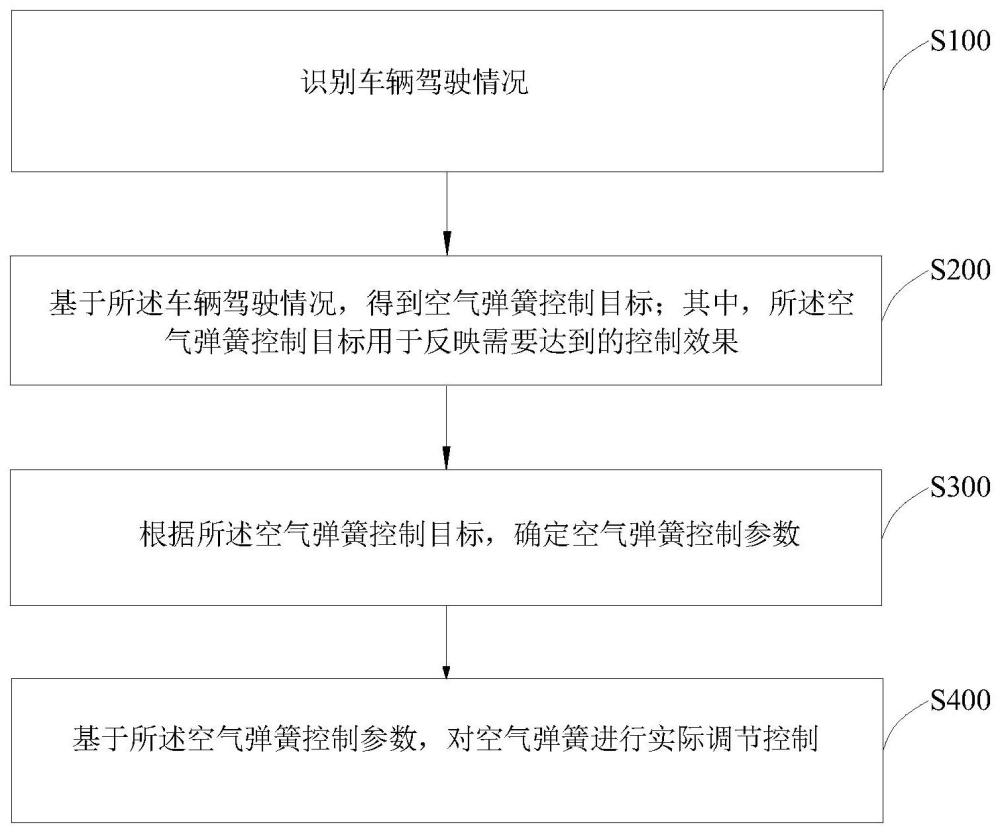
3、识别车辆驾驶情况;
4、基于所述车辆驾驶情况,得到空气弹簧控制目标;其中,所述空气弹簧控制目标用于反映需要达到的控制效果;
5、根据所述空气弹簧控制目标,确定空气弹簧控制参数;
6、基于所述空气弹簧控制参数,对空气弹簧进行实际调节控制。
7、本申请实施例中上述的技术方案,至少具有如下技术效果:
8、本申请实施例提供的空气弹簧控制方法,通过识别车辆驾驶情况,了解车辆的所处的实际驾驶环境,以便于更好地根据实际驾驶环境控制空气弹簧。基于识别的车辆驾驶情况,来进一步得到空气弹簧控制目标,空气弹簧控制目标用于反映需要达到的控制效果,有助于对空气弹簧的实际控制。根据空气弹簧控制目标,来确定空气弹簧控制参数,空气弹簧控制参数是实际的控制参数,是直接影响空气弹簧性能的参数。基于空气弹簧控制参数,对空气弹簧进行实际调节控制,以达到根据不同行车环境控制空气弹簧,提升车辆运行稳定性、提高乘坐舒适性、降低车辆维护成本的效果。
9、在第一方面的一种可能实现方式中,所述识别车辆驾驶情况,包括:
10、获取车辆雷达信息;
11、基于所述车辆雷达信息,构建车辆驾驶预测路况模型;其中,所述车辆驾驶预测路况模型是用于反映路况的数据模型;
12、基于所述构建车辆驾驶预测路况模型的结果,得到车辆驾驶预测路况模型。
13、在第一方面的一种可能实现方式中,所述基于所述车辆雷达信息,构建车辆驾驶预测路况模型,包括:
14、基于所述车辆雷达信息,分析雷达反射信号;
15、基于所述分析雷达反射信号的结果,得到路面障碍情况;
16、基于所述路面障碍情况,计算路面障碍率;其中,所述路面障碍率用于反应路面颠簸情况;
17、基于所述计算路面障碍率的结果,得到单位位移的路面障碍率;
18、基于所述单位位移的路面障碍率,构建车辆驾驶预测路况模型。
19、所述识别车辆驾驶情况,还包括:
20、基于所述车辆驾驶预测路况模型,按预设规则匹配车辆驾驶场景;
21、基于所述按预设规则匹配车辆驾驶场景的结果,得到车辆驾驶情况。
22、在第一方面的一种可能实现方式中,所述基于所述车辆驾驶预测路况模型,按预设规则匹配车辆驾驶场景,包括:
23、基于所述车辆驾驶预测路况模型的数值,匹配相应的驾驶场景映射区间;
24、基于所述匹配相应的驾驶场景映射区间的结果,得到车辆驾驶场景。
25、在第一方面的一种可能实现方式中,所述基于所述车辆驾驶情况,得到空气弹簧控制目标,包括:
26、基于所述车辆驾驶场景,获取对应的最佳空气弹簧伸缩控制区间值;
27、获取当前空气弹簧伸缩控制值;
28、基于所述最佳空气弹簧伸缩控制区间值和所述当前空气弹簧伸缩控制值,得到空气弹簧控制目标。
29、在第一方面的一种可能实现方式中,所述根据所述空气弹簧控制目标,确定空气弹簧控制参数,包括:
30、获取空气弹簧控制关系模型;其中,所述空气弹簧控制关系模型用于反映空气弹簧控制目标与控制参数之间的关联关系;
31、根据所述空气弹簧控制目标和所述空气弹簧控制关系模型,确定所述空气弹簧控制参数。
32、在第一方面的一种可能实现方式中,所述获取空气弹簧控制关系模型,包括:
33、获取多个空气弹簧样本控制参数集;
34、利用各个所述空气弹簧样本控制参数集控制所述空气弹簧进行测试,得到多个对应的空气弹簧控制数据集;
35、获取不同气压变化率下的所述空气弹簧控制数据集对应的不同舒适性量化评分;
36、对所述舒适性量化评分和对应的所述空气弹簧样本控制参数集进行数据拟合,得到所述空气弹簧控制关系模型。
37、在第一方面的一种可能实现方式中,所述根据所述空气弹簧控制目标和所述空气弹簧控制关系模型,确定所述空气弹簧控制参数,包括:
38、获取当前空气弹簧气压值;
39、基于所述当前空气弹簧气压值和空气弹簧控制目标,得到气压变化量区间;
40、基于所述空气弹簧控制关系模型,得到最佳气压变化率;
41、基于所述气压变化量区间和所述最佳气压变化率,确定空气弹簧控制参数。
42、第二方面,本申请实施例提供了一种空气弹簧控制系统,包括:
43、识别单元,用于识别车辆驾驶情况;
44、获取单元,用于基于所述车辆驾驶情况,得到空气弹簧控制目标;其中,所述空气弹簧控制目标用于反映需要达到的控制效果;
45、确认单元,用于根据所述空气弹簧控制目标,确定空气弹簧控制参数;
46、控制单元,用于基于所述空气弹簧控制参数,对空气弹簧进行实际调节控制。
47、第三方面,本申请实施例提供了一种空气弹簧控制设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面任一项所述的方法。
48、第四方面,本申请实施例提供了一种计算机程序产品,当计算机程序产品在终端设备上运行时,使得终端设备执行上述第一方面中任一项的所述方法。
49、可以理解的是,上述第二方面至第四方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
技术特征:
1.一种空气弹簧控制方法,其特征在于,包括:
2.如权利要求1所述的空气弹簧控制方法,其特征在于,所述识别车辆驾驶情况,包括:
3.如权利要求2所述的空气弹簧控制方法,其特征在于,所述基于所述车辆雷达信息,构建车辆驾驶预测路况模型,包括:
4.如权利要求3所述的空气弹簧控制方法,其特征在于,所述基于所述车辆驾驶预测路况模型,按预设规则匹配车辆驾驶场景,包括:
5.如权利要求4所述的空气弹簧控制方法,其特征在于,所述基于所述车辆驾驶情况,得到空气弹簧控制目标,包括:
6.如权利要求1至5任一项所述的空气弹簧控制方法,其特征在于,所述根据所述空气弹簧控制目标,确定空气弹簧控制参数,包括:
7.如权利要求6所述的空气弹簧控制方法,其特征在于,所述获取空气弹簧控制关系模型,包括:
8.如权利要求6所述的空气弹簧控制方法,其特征在于,所述根据所述空气弹簧控制目标和所述空气弹簧控制关系模型,确定所述空气弹簧控制参数,包括:
9.一种空气弹簧控制系统,其特征在于,包括:
10.一种空气弹簧控制设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至8任一项所述的方法。
技术总结
本申请适用于空气弹簧控制技术领域,尤其涉及空气弹簧控制方法、系统及设备,空气弹簧控制方法包括:识别车辆驾驶情况,了解车辆的所处的实际驾驶环境,以便于更好地根据实际驾驶环境控制空气弹簧。基于识别的车辆驾驶情况,来进一步得到空气弹簧控制目标,空气弹簧控制目标用于反映需要达到的控制效果,有助于对空气弹簧的实际控制。根据空气弹簧控制目标,来确定空气弹簧控制参数,空气弹簧控制参数是实际的控制参数,是直接影响空气弹簧性能的参数。基于空气弹簧控制参数,对空气弹簧进行实际调节控制,以达到根据不同行车环境控制空气弹簧,提升车辆运行稳定性、提高乘坐舒适性、降低车辆维护成本的效果。
技术研发人员:陈勇,陈佳俊,朱江风,杨芳燃
受保护的技术使用者:浙江盖茨工业科技股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!