基于环视系统的车位构造方法、系统、电子设备及介质与流程
本发明涉及智能驾驶,尤其涉及基于环视系统的车位构造方法、系统、电子设备及介质。
背景技术:
1、随着科学技术的发展,自动驾驶技术已经越来越成熟,而自动泊车技术作为自动驾驶技术的分支,逐渐称为研发热门。目前主流的自动泊车车位构造方法是通过深度学习,在环视图上学习四个车位角点框,通过环视图上的四个车位角点框的中心点得到车位的四个角点,根据四个角点计算出车位的宽高与中心点,并构造整个车位。
2、自动泊车技术的关键在于车位检测的精确性与通用性,大多数自动泊车是依赖环视图像,根据四个角点构造出车位后,根据环视图片像素坐标与物理坐标的线性关系进行转化,转化为物理坐标系的车位。这种方法对环视的精度要求很高,同时也比较要求车位的平整程度,对于车辆的环视去畸变而言,在越远的地方,畸变校正效果越差,使用四个角点构造的车位与实际车位会有较大的误差。同时,如果地面不平整,环视的拼接也会有较大的畸变,也会导致构造出的车位与实际车位有较大的误差,并且由于算力问题,模型检出的角点框并不能完全达到自动泊车要求的角点精度,场景的适用性较差。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明提出一种精确度高、成本低的基于环视系统的车位构造方法、系统、电子设备及介质。
2、一方面,本发明实施例提供了基于环视系统的车位构造方法,包括:
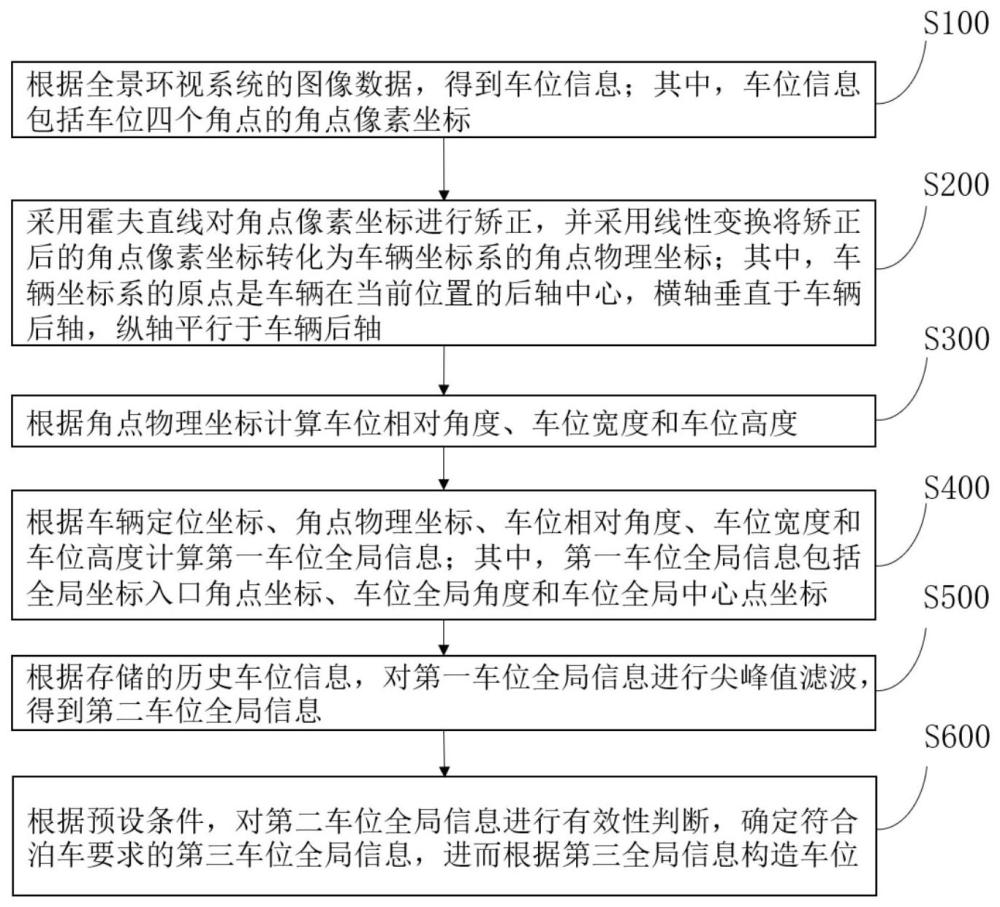
3、根据全景环视系统的图像数据,得到车位信息;其中,所述车位信息包括车位四个角点的角点像素坐标;
4、采用霍夫直线对角点像素坐标进行矫正,并采用线性变换将矫正后的角点像素坐标转化为车辆坐标系的角点物理坐标;其中,所述车辆坐标系的原点是车辆在当前位置的后轴中心,横轴垂直于车辆后轴,纵轴平行于车辆后轴;
5、根据所述角点物理坐标计算车位相对角度、车位宽度和车位高度;
6、根据车辆定位坐标、所述角点物理坐标、所述车位相对角度、所述车位宽度和所述车位高度计算第一车位全局信息;其中,所述第一车位全局信息包括全局坐标入口角点坐标、车位全局角度和车位全局中心点坐标;
7、根据存储的历史车位信息,对所述第一车位全局信息进行尖峰值滤波,得到第二车位全局信息;
8、根据预设条件,对所述第二车位全局信息进行有效性判断,确定符合泊车要求的第三车位全局信息,进而根据所述第三全局信息构造车位。
9、可选地,所述采用霍夫直线对角点像素坐标进行矫正,包括:
10、确定一个车位近角点,作为第一近角点,将另一个车位近角点作为第二近角点,计算所述第一近角点的霍夫直线斜率;
11、根据所述霍夫直线斜率,对第二近角点的角点像素坐标进行矫正。
12、可选地,所述根据所述角点物理坐标计算车位相对角度、车位宽度和车位高度,包括:
13、根据角点物理坐标计算第一近角点和第二近角点的角点距离;
14、根据所述角点距离和车位类型,计算车位相对角度;
15、基于所述车位相对角度,根据所述角点物理坐标计算车位宽度和车位高度。
16、可选地,所述根据车辆定位坐标、所述角点物理坐标、所述车位相对角度、所述车位宽度和所述车位高度计算第一车位全局信息,包括:
17、根据车辆定位坐标的轨迹横坐标、车辆航向角和各个所述角点物理坐标,计算各个角点的车位角点全局横坐标;
18、根据所述车辆定位坐标的轨迹纵坐标和所述车辆航向角和各个所述角点物理坐标,计算各个角点的车位角点全局纵坐标;
19、根据所述车位角点全局横坐标和所述车位角点全局纵坐标,确定全局坐标入口角点坐标;
20、根据所述车辆航向角和所述车位相对角度确定车位全局角度;
21、根据处于对角线的所述角点物理坐标计算车位全局中心点坐标;
22、根据所述车位角点全局横坐标、所述车位角点全局纵坐标、所述车位全局角度和车位全局中心点坐标确定第一车位全局信息。
23、可选地,所述根据存储的历史车位信息,对所述第一车位全局信息进行尖峰值滤波,得到第二车位全局信息,包括:
24、将所述第一车位全局信息和存储的历史车位信息进行匹配,得到当前车位的历史信息;
25、结合所述第一车位全局信息和所述历史信息,对车位全局中心点坐标和车位全局角度进行若干次均值滤波,得到第一滤波结果;
26、根据均值滤波次数和所有的所述第一滤波结果,计算第二滤波结果;
27、根据所述第二滤波结果构造全局车位,得到第二车位全局信息。
28、可选地,所述根据预设条件,对所述第二车位全局信息进行有效性判断,确定符合泊车要求的第三车位全局信息,进而根据所述第三全局信息构造车位的步骤中,所述预设条件包括以下至少之一:
29、车位尺寸大于车辆尺寸;
30、车位与车辆的相对位置距离大于预设的第一阈值;
31、车位与车辆的车位入口线的位置距离小于预设的第二阈值;
32、车位全局角度符合预设的角度要求。
33、可选地,所述根据车辆定位坐标、所述角点物理坐标、所述车位相对角度、所述车位宽度和所述车位高度计算第一车位全局信息的步骤中,所述第一车位全局信息的计算公式为:
34、gx=x*cos(trackq)-y*sin(trackq)+trackx
35、gy=x*sin(trackq)+y*cos(trackq)+tracky
36、gq=trackq+q
37、gxc=(gx1+gx3)/2
38、gyc=(gy1+gy3)/2
39、其中,gx表示车位角点全局横坐标;gy表示车位角点全局纵坐标;gq表示车位全局角度;gxc表示车位全局中心点横坐标;gyc表示车位全局中心点纵坐标;在车辆坐标系中,入口角点坐标为(x1,y1)和(x2,y2);w表示车位宽度,h表示车位高度,q表示车位相对角度;根据车辆定位坐标为(trackxtrackytrackq),trackx表示车辆的轨迹横坐标,tracky表示车辆的轨迹纵坐标,trackq表示车辆的航向角;x表示车位角点的物理相对横坐标;y表示车位角点的物理相对纵坐标;gx1表示车位入口角点的全局横坐标;gx3表示车位末端角点的全局横坐标;gy1表示车位入口角点的全局纵坐标;gy3表示车位末端角点的全局纵坐标。
40、另一方面,本发明实施例还提供了基于环视系统的车位构造系统,包括:
41、第一模块,用于根据全景环视系统的图像数据,得到车位信息;其中,所述车位信息包括车位四个角点的角点像素坐标;
42、第二模块,用于采用霍夫直线对角点像素坐标进行矫正,并采用线性变换将矫正后的角点像素坐标转化为车辆坐标系的角点物理坐标;其中,所述车辆坐标系的原点是车辆在当前位置的后轴中心,横轴垂直于车辆后轴,纵轴平行于车辆后轴;
43、第三模块,用于根据所述角点物理坐标计算车位相对角度、车位宽度和车位高度;
44、第四模块,用于根据车辆定位坐标、所述角点物理坐标、所述车位相对角度、所述车位宽度和所述车位高度计算第一车位全局信息;其中,所述第一车位全局信息包括全局坐标入口角点坐标、车位全局角度和车位全局中心点坐标;
45、第五模块,用于根据存储的历史车位信息,对所述第一车位全局信息进行尖峰值滤波,得到第二车位全局信息;
46、第六模块,用于根据预设条件,对所述第二车位全局信息进行有效性判断,确定符合泊车要求的第三车位全局信息,进而根据所述第三全局信息构造车位。
47、另一方面,本发明实施例还提供了一种电子设备,包括:处理器以及存储器;存储器用于存储程序;处理器执行程序实现如前面所述的方法。
48、另一方面,本发明实施例还提供了一种计算机存储介质,其中存储有处理器可执行的程序,处理器可执行的程序在由处理器执行时用于实现如前面所述的方法。
49、本发明实施例具有如下有益效果:本发明实施例根据全景环视系统的图像数据,得到车位信息;其中,车位信息包括车位四个角点的角点像素坐标;采用霍夫直线对角点像素坐标进行矫正,并采用线性变换将矫正后的角点像素坐标转化为车辆坐标系的角点物理坐标;根据角点物理坐标计算车位相对角度、车位宽度和车位高度;根据车辆定位坐标、角点物理坐标、车位相对角度、车位宽度和车位高度计算第一车位全局信息;根据存储的历史车位信息,对第一车位全局信息进行尖峰值滤波,得到第二车位全局信息;根据预设条件,对第二车位全局信息进行有效性判断,确定符合泊车要求的第三车位全局信息,进而根据第三全局信息构造车位的整体步骤,可以矫正由于地面的不平整以及环视标定的局限性导致的系统误差,通过滤波方法改善模型输出车位的稳定性,使得其能够适应不同畸变程度下的精确构造车位的要求,能够大大提升泊车的精确度,适用场景广泛。
- 还没有人留言评论。精彩留言会获得点赞!