一种汽车制动系统轮缸压力鲁棒预测控制方法及装置
本发明涉及汽车制动,特别是关于一种汽车制动系统轮缸压力鲁棒预测控制方法及装置。
背景技术:
1、液压制动系统是保障汽车行驶安全的关键部件。制动防抱死控制、驱动防滑控制以及电子稳定性控制等主动安全功能的实现在很大程度上取决于制动系统轮缸液压力的控制性能。
2、与线性电磁阀相比,高速开关阀具有成本低廉、响应迅速和鲁棒性强等特点,因此被广泛应用于汽车液压制动系统。考虑到高速开关阀全开全关的离散工作特性,通常采用脉宽调制(pwm)控制方式来控制流过开关阀的平均制动液流量,进而实现对轮缸液压力的控制。然而,现有的pwm控制方式主要存在以下缺陷:一是轮缸液压力的控制本质上是基于标定的开关阀的平均流量和pwm占空比之间的关系实现的,其无法直接量化电磁阀开关状态与轮缸液压力之间的关系;二是pwm控制方式需要pwm发生器,增加了液压制动系统的成本及控制算法的复杂度;三是液压制动系统的模型不确定性、环境因素变化以及不确定扰动等因素会影响轮缸液压力的控制性能,工程上通常采用参数标定的方式处理,但其工作量大,且效率低。
技术实现思路
1、针对上述问题,本发明的目的是提供一种汽车制动系统轮缸压力鲁棒预测控制方法及装置,从电磁阀离散开关的角度建立了进液阀和出液阀的开关状态与轮缸液压力的直接量化关系,进而可以直接优选出进液阀和出液阀的控制命令,避免了pwm发生器的使用;同时基于历史运行数据在线辨识轮缸液压力模型,可以减轻标定工作量,缩短开发周期,提高鲁棒性。
2、为实现上述目的,本发明采取以下技术方案:
3、第一方面,本技术提供一种汽车制动系统轮缸压力鲁棒预测控制方法,应用于汽车制动系统,所述汽车制动系统包括:液压控制单元、高压供给单元、制动轮缸、低压回油单元、进液阀和出液阀,所述方法,包括:
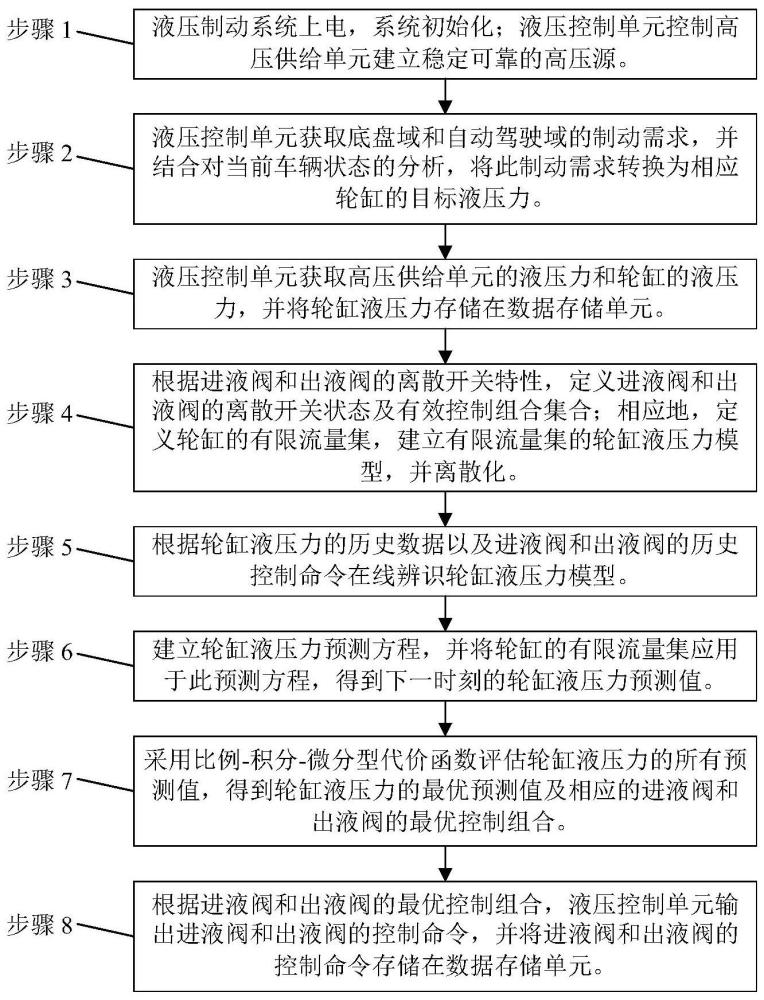
4、s1,所述液压控制单元控制所述高压供给单元建立稳定的高压源;
5、s2,所述液压控制单元获取汽车的制动需求,根据所述制动需求计算所述制动轮缸的目标液压力;
6、s3,所述液压控制单元获取所述制动轮缸的当前采样周期的液压力;
7、s4,所述液压控制单元获取预先存储的离散化的轮缸液压力模型;其中,所述离散化的轮缸液压力模型,用于根据制动轮缸当前采样周期的液压力、集总扰动和制动液流量求解下一采样周期的液压力,所述制动液流量根据有限流量集与当前采样周期的进液阀和出液阀的有效控制集的相关关系求解;所述有效控制集为所述进液阀和出液阀的有效的控制命令的组合;
8、s5,所述液压控制单元根据制动轮缸的液压力、进液阀和出液阀的控制命令的历史数据,求解所述集总扰动;
9、s6,所述液压控制单元建立轮缸液压力的预测方程,并预测一下采样周期的制动轮缸的液压力的所有可能值;
10、s7,所述液压控制单元,根据所述目标液压力,基于预设的评估方法对所有可能值进行评估,确定最优预测值及对应的进液阀和出液阀的控制命令;
11、s8,所述液压控制单元,根据最优预测值对应的进液阀和出液阀的控制命令,控制进液阀和出液阀执行打开或闭合的动作。
12、在本技术的一种实现方式中,所述进液阀和出液阀的开关状态定义为:
13、
14、式中sv表示电磁阀开关状态,下标v=i表示进液阀,v=o表示出液阀;
15、进液阀和出液阀的控制组合定义如下:
16、s=(si,so)
17、所述进液阀和出液阀的有效控制集为:
18、s={s0,s1,s2}
19、式中s表示进液阀和出液阀的有效控制集,其中s0=(0,0),s1=(1,0),s2=(0,1)。
20、在本技术的一种实现方式中,所述有限流量集定义为:
21、u={q0,q1,q2}
22、式中u表示制动轮缸的有限流量集,q0、q1和q2分别为对应于s0、s1和s2的制动轮缸的流量,使用下式计算
23、
24、式中cd为电磁阀流量系数,av为电磁阀阀口横截面积,ρ为制动液密度,ps为高压供给单元的液压力,p0为低压回油单元的液压力,pw为制动轮缸的液压力。
25、在本技术的一种实现方式中,所述轮缸液压力模型为:
26、qw∈u
27、式中β为制动液的体积模量,v0为轮缸的初始体积,dw为集总扰动,qw为进入或流出轮缸的制动液流量;
28、令y=pw,f=dw,α=β/v0,u=qw,得到离散化的轮缸液压力模型,为:
29、y(k+1)=y(k)+ts[f(k)+αu(k)],u(k)∈u
30、式中ts为采样周期,y(k)、f(k)和u(k)分别表示第k个采样周期时y、f和u的值。
31、在本技术的一种实现方式中,根据制动轮缸的液压力、进液阀和出液阀的控制命令的历史数据,采用代数参数辨识方法,求解所述集总扰动。
32、在本技术的一种实现方式中,求解所述集总扰动的公式为:
33、
34、式中为f的估计值,tf为历史数据时间窗宽度,tf=nfts,nf为采样周期个数,τ为积分变量。
35、在本技术的一种实现方式中,所述轮缸液压力的预测方程,具体为:
36、ui=qi,(i=0,1,2)
37、式中下标i=0,1,2分别对应于不同的控制组合,则表示对应于第i个控制组合的第k+1采样周期轮缸液压力的预测值。
38、在本技术的一种实现方式中,基于pid型代价函数对所有可能值进行评估。
39、在本技术的一种实现方式中,所述pid型代价函数,具体为:
40、ji=[w1pi(k)+w2ii(k)+w3di(k)]2+hi,(i=0,1,2)
41、式中ji为对应于第i个控制组合的代价函数,w1、w2和w3为权重系数,pi(k)、ii(k)和di(k)分别为比例项、积分项和微分项,hi为附加项;
42、比例项、积分项和微分项分别定义为:
43、
44、i(0)=0。
45、
46、附加项的定义为:
47、
48、式中∞表示正无穷。
49、第二方面,本技术提供一种汽车制动系统轮缸压力鲁棒预测控制装置,包括:目标液压力计算模块、数据处理与存储模块、轮缸液压力模型模块、在线参数辨识模块、轮缸液压力预测模块、代价函数评估模块;
50、所述的目标液压力计算模块用于根据获取的底盘域和自动驾驶域的制动需求,并结合对当前车辆状态的分析,将此制动需求转换为相应轮缸的目标液压力;
51、所述的数据处理与存储模块用于获取高压供给单元的液压力、低压回油单元的液压力以及制动轮缸的液压力;并存储轮缸液压力的历史数据以及进液阀和出液阀的历史控制命令;
52、所述的轮缸液压力模型模块用于构建进液阀和出液阀的有效控制组合,建立有限流量集轮缸液压力模型,以量化表征电磁阀开关状态与轮缸液压力之间的关系;
53、所述的在线参数辨识模块采用代数参数辨识方法,实时估计轮缸液压力模型的集总扰动,并用于对所述轮缸液压力预测模型模块的液压力预测方程进行校正;
54、所述的轮缸液压力预测模块将轮缸的有限流量集应用于预测方程,得到下一时刻轮缸液压力的预测值;
55、所述的代价函数评估模块用于根据制动轮缸液压力的目标值,采用pid型代价函数对所述的液压力预测模型模块得到的轮缸液压力的预测值进行评估;通过求解优化问题得到轮缸液压力的最优预测值及相应的进液阀和出液阀的最优控制组合;并将其直接输出到进液阀和出液阀的驱动装置,控制进液阀和出液阀的打开和关闭,进而实现轮缸液压力的控制。
56、本发明由于采取以上技术方案,其具有以下优点:
57、(1)本发明根据高速开关阀全开和全关的离散工作特性,定义了进液阀和出液阀的有效控制组合及相应的轮缸的有限流量集,建立了有限流量集轮缸液压力模型,量化表征了电磁阀开关状态与轮缸液压力之间的关系。
58、(2)本发明使用pid型代价函数优化评估轮缸液压力的预测值与目标值之间的偏差,优选出轮缸液压力的最优预测值及相应的进液阀和出液阀的最优控制组合,并直接输出到进液阀和出液阀的驱动装置,取消了pwm轮缸液压力控制方式中的pwm发生器,降低了系统成本及算法复杂度。
59、(3)本发明通过代数参数辨识方法在线估计轮缸液压力模型中的集总扰动,并基于此对预测模型进行补偿,不仅提高了轮缸液压力控制算法的鲁棒性,而且降低了算法的标定工作量。
- 还没有人留言评论。精彩留言会获得点赞!