基于三维模型的智能碾压轨迹纠偏系统及方法与流程
本发明涉及车辆轨迹纠偏,尤其涉及基于三维模型的智能碾压轨迹纠偏系统及方法。
背景技术:
1、在现代车辆的驾驶系统中,轨迹控制和稳定性是关键技术之一。尤其是在复杂的道路条件和多变的环境中,保持车辆沿预定轨迹安全、稳定地行驶成为一个挑战。传统的轨迹控制系统主要依赖于基本的车载传感器(如转速传感器和转向角度传感器)来监测和调整车辆的运动状态,这些系统往往只能对当前的驾驶状况做出反应,而不具备预测未来道路状况和车辆行为的能力。
2、随着技术的发展,包括机器学习和人工智能在内的先进技术被引入车辆动态控制领域。这些技术的加入为实现更智能化和自适应的轨迹纠偏提供了可能。然而,现有技术在整合多源数据处理和实时环境感知方面仍面临挑战,尤其是在如何准确理解复杂环境和动态适应路面变化方面。
3、此外,传统系统在处理突发事件和预测未来轨迹方面的限制,导致其在复杂道路条件下的表现不尽如人意。这不仅影响了行车的安全性,也降低了驾驶的舒适性和效率。因此,开发一种能够实时感知环境、精确预测轨迹偏离并智能调整行驶轨迹的系统,成为提升车辆动态性能和安全性的关键需求。
4、基于上述背景,本发明提出了一种基于三维模型的智能碾压轨迹纠偏系统。该系统集成了高级车载传感器、三维环境建模技术和先进的数据处理算法,能够实时准确地监测和分析车辆及其周围环境的状态,通过智能算法预测并纠正轨迹偏离,有效提升了车辆的行驶稳定性和安全性。
技术实现思路
1、基于上述目的,本发明提供了基于三维模型的智能碾压轨迹纠偏系统及方法。
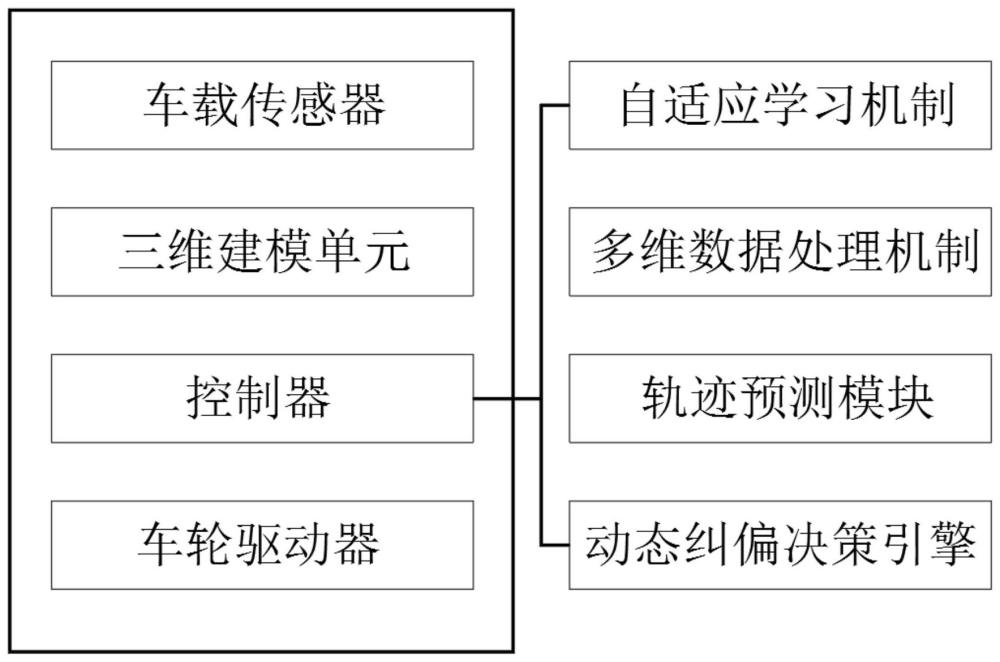
2、基于三维模型的智能碾压轨迹纠偏系统,包括以下模块:
3、车载传感器,用于实时监测车轮的转速、转向角度,结合车辆的加速度和角速度信息形成初始数据,并将初始数据发送至控制器;
4、三维建模单元,构建车辆周边实时的三维地图模型,该三维地图模型包含道路形态、障碍物位置及路面特性信息;
5、控制器,基于预设算法综合分析车载传感器的初始数据和三维地图模型,预测车轮轨迹是否产生偏离并计算出车轮需要纠正的角度,生成指令后将指令发送给车轮驱动器;
6、车轮驱动器,响应控制器的指令,对车轮进行调整,以纠正偏离轨迹,若角度偏离大,控制器将指令发送给车轮驱动器,使其减小输出力矩,若角度偏离小,控制器则将指令发送给车轮驱动器,使其增加输出力矩,使车轮恢复到正确的轨迹上。
7、进一步的,所述车轮转速、转向角度分别通过转速传感器、转向角度传感器获取,所述车辆的加速度和角速度信息基于惯性测量单元提供。
8、进一步的,所述三维建模单元包括:
9、车载摄像头和激光扫描仪协同工作,车载摄像头捕捉车辆周围环境的视觉图像,激光扫描仪用于测量环境中的物体距离和形状;
10、数据处理单元,接收来自车载摄像头和激光扫描仪的数据,通过数据处理单元进行深度学习和图像处理算法的分析,对车辆周围环境进行高精度三维重构;
11、实时更新机制,确保三维地图模型根据车辆的移动和环境的变化实时更新,以提供持续准确的环境感知。
12、进一步的,所述控制器包括:
13、多维数据处理,处理来自车载传感器(如转速、转向角度、加速度和角速度)和三维建模单元(如道路形态、障碍物位置及路面特性)的多维数据;
14、轨迹预测模块,使用深度学习算法分析上述多维数据,预测车轮轨迹的偏离情况,轨迹预测模块利用历史数据和实时数据训练模型,以提高预测的准确性;
15、动态纠偏决策引擎,基于预测结果,该引擎计算出车轮需要纠正的角度,不仅考虑当前的轨迹偏离程度,还预测未来的行驶路径,以决定最佳的纠偏策略;
16、自适应学习机制,预设算法基于车辆的实际行驶情况和反馈数据持续优化,提高处理复杂驾驶场景的能力。
17、进一步的,所述多维数据处理具体包括:
18、数据预处理子模块,用于清洗和规范化来自车载传感器的数据和三维建模单元的数据,确保数据质量和一致性,采用数据融合技术来综合分析来自不同传感器的数据,提供一个统一的数据视图;
19、动态数据解析引擎,实时解析融合后的数据,以便快速响应车辆当前的行驶状态和周围环境变化,确保实时性和准确性。
20、进一步的,所述轨迹预测模块具体包括:
21、深度学习模型,用于处理和分析车载传感器和三维建模单元的数据,使用cnn(卷积神经网络)处理来自摄像头和激光扫描仪的图像数据,使用rnn(循环神经网络)处理时间序列数据,包括车辆的运动状态;
22、强化学习算法,基于dqn(深度q网络),所述dqn算法公式:qnew(st,at)=q(st,at)+α(rt+1+γmaxaq(st+1,a)-q(st,at));
23、其中:q(s,a)是动作a在状态s下的q值,α是学习率,rt+1是在状态st下采取动作at后获得的即时奖励,γ是折扣因子,用于平衡即时奖励和未来奖励,st+1是下一个状态,maxaq(st+1,a)表示在下一个状态下所有可能动作的最大q值,在dqn中,q函数是通过一个深度神经网络来近似的,该网络以状态作为输入,输出每个动作的预期回报。
24、数据融合策略,采用特征工程和自动特征提取技术,以确保从不同传感器获得的数据被整合和利用,该策略通过结合不同数据源的信息来提高预测的准确性和鲁棒性。
25、进一步的,所述动态纠偏决策引擎基于决策算法,所述决策算法结合当前的轨迹偏离情况和预测的未来行驶路径,计算出车轮所需的最优纠正角度,依据公式:
26、其中,θcorrect为车轮所需的纠正角度,e(t)为当前时间点车轮的轨迹偏离度,kp,ki,和kd分别是比例、积分和微分增益,用于调整纠偏响应的强度和速度;
27、轨迹偏离度(e(t))的计算:e(t)根据实时轨迹分析和未来路径预测得出,量化当前轨迹与预期轨迹之间的差距;
28、控制器增益的调整:kp,ki,和kd三个参数根据车辆的具体特性和预测模型的输出进行调整,以确保纠偏动作既及时又不过激,根据实际的纠偏效果持续调整kp,ki,和kd的值,从而优化纠偏性能。
29、进一步的,所述轨迹偏离度(e(t))的计算还包括:
30、定义轨迹偏离度e(t):轨迹偏离度e(t)在任意时刻t定义为车辆实际轨迹与预期轨迹之间的几何距离,设实际轨迹上的点为pactual(t),预期轨迹上的对应点为pexpected(t),则轨迹偏离度表示为两点之间的欧几里得距离:
31、
32、其中,(xactual(t),yactual(t))和(xexpected(t),yexpected(t))分别是实际轨迹和预期轨迹在时间t的坐标;
33、获取实际和预期轨迹点:实际轨迹点pactual(t)通过车载传感器结合三维地图模型获取,预期轨迹点pexpected(t)通过轨迹预测模块获得;
34、轨迹偏离度的实时计算:在车辆行驶过程中,持续获取实际轨迹点和预期轨迹点并实时计算轨迹偏离度e(t),应用上式进行计算。
35、基于三维模型的智能碾压轨迹纠偏方法,包括以下步骤:
36、s1:环境感知和数据获取,利用车载摄像头和激光扫描仪实时捕捉车辆周围的环境,包括道路形态、障碍物位置及路面特性,同时,车载传感器组收集车辆的实时运动状态数据,包括转速、转向角度、加速度和角速度;
37、s2:三维模型构建,基于s1的环境感知数据,构建车辆周围环境的实时三维地图模型,为车辆提供全面的环境信息和轨迹路径;
38、s3:轨迹预测和分析,结合车辆当前状态数据和三维地图模型,通过深度学习和强化学习算法预测车轮的轨迹偏离情况,并分析未来的行驶路径;
39、s4:纠偏决策制定,基于预测和分析结果,动态纠偏决策引擎计算出车轮所需的最优纠正角度,该决策考虑即时的轨迹偏离程度和预测的未来行驶路径,平衡纠偏的即时性和长期稳定性,并发出具体指令;
40、s5:执行轨迹纠偏,车轮驱动器根据纠偏决策引擎的指令调整车轮的转向角度和速度,以纠正轨迹偏离。
41、本发明的有益效果:
42、本发明,通过集成车载传感器、三维建模单元和数据处理技术,显著提高了轨迹纠偏的准确性,系统能够实时监测并分析车辆的运动状态和周围环境,包括道路形态、障碍物位置和路面特性,这种全面的监测和分析能力确保了车辆即使在复杂或多变的道路条件下也能保持正确的行驶轨迹,大大提高行车安全性。
43、本发明,利用深度学习和强化学习算法,不仅能够处理当前的轨迹偏离问题,还能够预测未来的行驶路径,以实现更智能化的轨迹调整,这种前瞻性的纠偏方法使系统能够适应各种意外情况,例如突然的道路变化或极端天气条件,此外,系统的自适应学习机制允许它根据实际行驶情况不断优化纠偏策略,进一步提升系统的智能化和适应性。
44、本发明,通过精确控制车轮的纠正角度,有效减少了不必要的操控动作和过度纠偏,从而提升了驾驶的平稳性和乘坐的舒适性,这种高效的轨迹管理不仅减少了能耗,还有助于降低车辆的磨损和维修成本,因此,该系统不仅提升了车辆的性能,还增强了驾驶体验的整体质量。
- 还没有人留言评论。精彩留言会获得点赞!