一种车内无人自动驾驶营运汽车远程操控方法及装置与流程
本发明涉及自动驾驶,特别涉及一种车内无人自动驾驶营运汽车远程操控方法及装置。
背景技术:
1、实现规模化车内无人商业化应用的前提是能够确保车辆运行安全,一方面自动驾驶汽车需要达到一定的技术条件水平,确保有能力完成道路运输任务;另一方面,当车辆行驶过程中出现突发事件时,自动驾驶汽车能够自行处理、避免或减轻人身财产损失,但就当前自动驾驶技术发展现状、我国道路交通现状及业界普遍共识而言,即使现今自动驾驶汽车的底层架构和大部分技术问题均已经被解决,即自动驾驶汽车能够独立完成90%以上场景的自动驾驶任务,但仍有剩下10%的长尾场景始终无法覆盖,因此,为实现自动驾驶汽车在实际交通环境中落地安全应用,同时顺应车内无人的自动驾驶商业化发展模式,迫切需要借助远程应急操作控制系统和远程人员来确保在10%的长尾场景出现情况下采取有效的应急处置措施,确保车辆行驶安全。
2、现有自动驾驶汽车远程控制方法、装置及相关系统的设计前提是自动驾驶车辆运行过程中发出相应的接管指令,然后由远程人员接管并驾驶车辆,再执行后续的相关操作,缺乏考虑驾驶员是否具备相应接管能力的判断;另一方面,现有部分技术判断驾驶员在个别紧急情况下具备的接管能力不足时,由系统自动执行应急处置操作,该技术方案的前提是自动驾驶系统已经提前检测到突发事件潜在发生风险并预置了相应的应急处置方案,但当上述10%的长尾场景出现时,难以确保自动驾驶系统能够正确采取有效措施。
技术实现思路
1、本发明旨在至少一定程度上解决上述技术中的技术问题之一。为此,本发明的第一个目的在于提出一种车内无人自动驾驶营运汽车远程操控方法,旨在解决当长尾场景出现时,传统远程系统及人员无法进行突发事件应急处置,从而引发自动驾驶汽车行车风险,阻碍车内无人自动驾驶汽车发展应用的问题。
2、本发明的第二个目的在于提出一种车内无人自动驾驶营运汽车远程操控装置。
3、为达到上述目的,本发明第一方面实施例提出了一种车内无人自动驾驶营运汽车远程操控方法,包括:
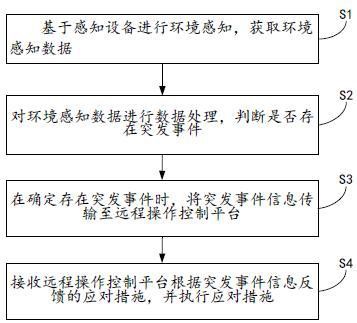
4、基于感知设备进行环境感知,获取环境感知数据;
5、对环境感知数据进行数据处理,判断是否存在突发事件;
6、在确定存在突发事件时,将突发事件信息传输至远程操作控制平台;
7、接收远程操作控制平台根据突发事件信息反馈的应对措施,并执行应对措施。
8、根据本发明的一些实施例,所述感知设备包括:
9、车外环境感知模块,用于获取车外的第一环境感知数据;
10、车内环境感知模块,用于获取车内的第二环境感知数据;
11、adas地图获取模块,用于获取道路信息;
12、信息整合模块,用于根据第一环境感知数据、第二环境感知数据及道路信息,确定环境感知数据。
13、根据本发明的一些实施例,所述突发事件类别包括车外运行环境异常、车辆异常、乘员情况异常及货物情况异常。
14、根据本发明的一些实施例,所述车外运行环境异常,包括道路基础设施异常、非预设交通参与者闯入、非标准障碍物出现在运营线路及突发地质灾害;
15、所述车辆异常包括车辆运动状态异常、车辆突发火灾;
16、所述乘员情况异常包括乘员异常行为;
17、所述货物情况异常包括货物翻倒、冷藏车温度异常、起火。
18、根据本发明的一些实施例,所述道路基础设施异常,包括临时交通管制、未设置警示牌的施工路段、路面塌陷、交通标志标识污损缺失及前方发生事故;
19、所述非预设交通参与者闯入,包括非机动车、行人、特种车辆、未按交通规则行驶的交通参与者、动物进入运营线路;
20、所述非标准障碍物出现在运营线路,包括路面遗撒、落石、锥桶;
21、所述突发地质灾害,包括地震、台风、暴雪、暴雨、路面结冰、严重雾霾、强雷电、泥石流、滑坡;
22、所述车辆运动状态异常包括超速、急加速、急减速、车道偏移;
23、所述乘员异常行为包括突发疾病、危险行为。
24、根据本发明的一些实施例,在确定存在突发事件时,触发方式包括有提示突发事件触发和无提示突发事件触发;
25、有提示突发事件触发的提示方式为营运汽车采取声音、远程操作控制平台人机交互端出现相应视觉提示方式提示远程人员;
26、无提示突发事件触发条件由远程人员基于驾驶经验和突发事件应急预案培训方式,人为通过远程操作控制平台进行突发事件的识别,经必要性判定后确定事件触发状态。
27、根据本发明的一些实施例,所述应对措施包括紧急制动、变更车道和防御性驾驶。
28、根据本发明的一些实施例,基于感知设备进行环境感知,获取环境感知数据,包括:
29、基于营运汽车上的双目立体视觉模块获取第一环境感知图像和第二环境感知图像;
30、计算第一环境感知图像和第二环境感知图像之间的视差图;
31、对视差图进行噪声去除和平滑处理,得到修正视差图;
32、根据图像处理和计算机视觉算法,对视差图中地面区域的特征进行提取,根据提取结果基于图像分割算法进行分割,得到若干个第一局部区域;
33、基于营运汽车上的激光雷达获取所处环境的多帧点云数据,并进行融合,得到融合点云数据;
34、对融合点云数据进行识别,确定融合点云数据中各个第二局部区域包括的物体及物体的位置;
35、根据各个第二局部区域包括的物体及物体的位置基于二维熵筛选出稳定性高的第二特征点;
36、对若干个第一局部区域基于二维熵筛选出稳定性高的第一特征点;
37、将第二特征点与第一特征点采用欧式距离进行相似度匹配,确定相匹配的第一局部区域和第二局部区域,将相匹配的第一局部区域和第二局部区域进行信息融合,得到环境感知数据。
38、根据本发明的一些实施例,对环境感知数据进行数据处理,判断是否存在突发事件,包括:
39、对环境感知数据基于卷积神经网络中的多个卷积层和池化层通过多次迭代卷积处理,得到若干张高层次特征表示的中间特征图;
40、对若干张高层次特征表示的特征图基于卷积神经网络中的上采样层和卷积层进行合并卷积处理,得到目标特征图;
41、根据目标特征图对营运汽车所处的道路环境进行建模,得到道路环境模型,根据道路环境模型判断是否存在突发事件。
42、为达到上述目的,本发明第二方面实施例提出了一种车内无人自动驾驶营运汽车远程操控装置,包括:
43、获取模块,用于基于感知设备进行环境感知,获取环境感知数据;
44、判断模块,用于对环境感知数据进行数据处理,判断是否存在突发事件;
45、确定模块,用于在确定存在突发事件时,将突发事件信息传输至远程操作控制平台;
46、接收模块,用于接收远程操作控制平台根据突发事件信息反馈的应对措施,并执行应对措施。
47、本发明提出了一种车内无人自动驾驶营运汽车远程操控方法及装置,基于感知设备实时进行环境感知,对环境感知数据进行数据处理,判断是否存在突发事件;在确定存在突发事件时,将突发事件信息传输至远程操作控制平台;接收远程操作控制平台根据突发事件信息反馈的应对措施,并执行应对措施。实现突发事件应急处置,降低自动驾驶汽车行车风险,提高了无人自动驾驶营运汽车的安全性。
48、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
49、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!