车辆的控制方法、装置、计算机设备及存储介质与流程
本发明涉及车辆控制,具体涉及车辆的控制方法、装置、计算机设备及存储介质。
背景技术:
1、随着社会的进步和人们生活水平的提高,汽车已成为人们日常生活中不可或缺的交通工具。随着汽车的普及,车辆安全问题日益凸显。车辆通常配备了涉及主动安全的相关系统和涉及被动安全的相关系统。主动安全技术的目标是预防事故的发生,而被动安全技术则着重于事故发生后如何最大限度地保护乘员。
2、防抱死制动系统(anti-lock braking system,abs)是其中关键的主动安全技术。在汽车制动过程中,abs通过监测车轮转速的变化,自动调节制动器的制动力,使得车轮处于边滚边滑的状态,以维持与地面的最大附着力。这不仅使制动器效能得到最大化,确保在紧急制动时车辆依然具备转向能力,还能有效地防止车辆的侧滑和甩尾,进而增强行驶的稳定性。除此之外,abs还能大幅缩短制动距离和时间,减轻轮胎与地面的摩擦,从而降低轮胎的磨损。因此,近些年来abs已经成为车辆的标准配置并广泛应用。
3、例如,相关技术中,一种关于abs的控制方法是,在启动abs时,采集轮速数据,根据轮速数据计算相关路面状况或abs的当前的控制参数,通过该控制参数对abs进行控制;然而,该方案在实际执行时,时常会遇到abs介入后,abs使能效果不佳的情况。
技术实现思路
1、有鉴于此,本发明提供了一种车辆的控制方法、装置、计算机设备及存储介质,以解决特殊场景下abs使能效果不佳的问题。
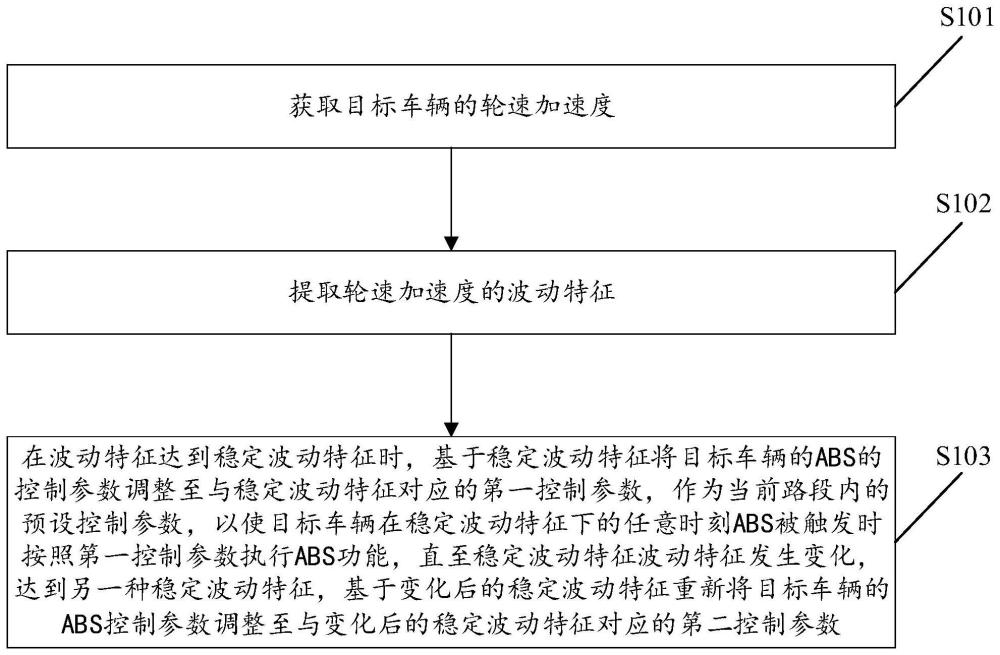
2、第一方面,本发明提供了一种车辆的控制方法,车辆的控制方法包括:获取目标车辆的轮速加速度;提取所述轮速加速度的波动特征;在所述波动特征达到稳定波动特征时,基于所述稳定波动特征将目标车辆的abs控制参数更新至与所述稳定波动特征对应的第一控制参数,作为当前路段内的预设控制参数,以使目标车辆在所述稳定波动特征下的任意时刻abs被触发时按照所述第一控制参数执行abs功能,直至稳定波动特征发生变化,达到另一种稳定波动特征,基于变化后的稳定波动特征重新将目标车辆的abs控制参数调整至与变化后的稳定波动特征对应的第二控制参数。
3、作为示例性的实施例,基于所述稳定波动特征将目标车辆的abs控制参数更新至与所述稳定波动特征对应的第一控制参数之前包括:判断所述稳定波动特征的持续时长是否大于预设时长,所述预设时长是在所述波动特征达到稳定波动特征时,所述目标车辆的在所述稳定波动特征下对应的abs介入总时长确定的;当所述稳定波动特征的持续时长大于所述预设时长,则进入基于所述波动特征将目标车辆的abs控制参数调整至与所述波动特征对应的第一控制参数的步骤;当所述稳定波动特征的持续时长小于预设时长,则在所述波动特征达到稳定波动特征之后,重新确定所述预设时长,并返回判断所述稳定波动特征的持续时长是否大于所述预设时长的步骤,直至所述稳定波动特征的持续时长大于所述预设时长。
4、作为示例性的实施例,基于变化后的稳定波动特征重新将目标车辆的abs控制参数调整至与变化后的稳定波动特征对应的第二控制参数之前还包括:判断所述稳定波动特征的变化状态是否为重复性变化状态;当所述稳定波动特征的变化状态为重复性变化状态时,在当前重复性变化状态结束后,按照当前重复性变化状态结束之后的最新变化后的稳定波动特征重新将目标车辆的abs控制参数调整至与波动特征对应的第二控制参数。
5、作为示例性的实施例,判断所述稳定波动特征的变化状态是否为重复性变化状态包括:在所述稳定波动特征发生变化时,判断变化后的稳定波动特征中是否存在与前n个稳定波动特征中的至少一个稳定波动特征的相似度大于预设相似度;当存在时,则确认所述波动特征的变化状态为重复性变化状态。
6、作为示例性的实施例,当变化后的稳定波动特征与前n个稳定波动特征中的任意一个稳定波动特征的相似度小于预设相似度时,判断所述变化后的稳定波动特征的持续时长是否超过重复变化状态中最大重复间隔;当超过所述最大重复间隔时,确认当前重复性变化状态结束。
7、作为示例性地实施例,车辆的控制方法还包括:基于波动特征计算abs触发判断阈值;在实时轮速加速度超出abs触发判断阈值时,基于实时轮速加速度确定目标车辆的颠簸等级;基于颠簸等级确定目标车辆的abs触发参数;其中,实时加速度与abs触发参数正相关。
8、作为示例性地实施例,车辆的控制方法还包括基于所述波动特征计算abs触发判断阈值;在实时轮速加速度超出所述abs触发判断阈值时,基于所述实时轮速加速度确定所述目标车辆的颠簸等级;基于所述颠簸等级确定所述目标车辆的启动abs的滑移率门限;其中,所述颠簸等级与启动abs的滑移率门限正相关。
9、作为示例性地实施例,车辆的控制方法还包括:获取所述目标车辆的属性信息;其中,所述属性信息包括车轮数量和/或车辆重量;基于所述属性信息对所述abs触发判断阈值进行修正。
10、第二方面,本发明提供了一种车辆的控制装置,车辆的控制装置包括:获取模块,用于获取目标车辆的轮速加速度;波动特征提取模块,用于提取轮速加速度的波动特征;控制模块,用于在所述波动特征达到稳定波动特征时,基于所述稳定波动特征将目标车辆的abs控制参数更新至与所述稳定波动特征对应的第一控制参数,作为当前路段内的预设控制参数,以使目标车辆在所述稳定波动特征下的任意时刻abs被触发时按照所述第一控制参数执行abs功能,直至稳定波动特征发生变化,达到另一种稳定波动特征,基于变化后的稳定波动特征重新将目标车辆的abs控制参数调整至与变化后的稳定波动特征对应的第二控制参数。
11、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的车辆的控制方法。
12、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的车辆的控制方法。
13、本发明提供的车辆的控制方法,获取目标车辆的轮速加速度;提取所述轮速加速度的波动特征;在波动特征达到稳定时,基于稳定波动特征,将目标车辆的abs控制参数更新至与稳定波动特征对应的第一控制参数作为当前路段内的预设控制参数,以使目标车辆在当前稳定波动特征下的任意时刻abs被触发时按照第一控制参数执行abs功能,直至稳定波动特征发生变化,基于变化后的稳定波动特征重新将目标车辆的abs控制参数更新至与变化后的新的稳定波动特征对应的第二控制参数;上述方案,实时检测加速度的波动特征,在波动特征达到稳定后,则表征当前加速度的波动是较为稳定的,根据加速度的当前稳定波动特征预设对应的abs控制参数,在稳定波动特征发生变化前的任意时刻,只要abs介入,则可按照当前稳定波动特征对应的控制参数控制abs使能,以防止由于路面不均匀导致abs启动时刻或急刹车时采集的数据计算出的abs控制参数不适宜abs介入期间的路面状况,导致abs使能效果差的问题,根据检测到的稳定波动特征提前预置对应的abs控制参数,以在abs介入后均可适应当前不均匀路面中的绝大部分的路面状况,并且在稳定波动状态发生变化后,能够及时更新abs控制参数,以使后续abs介入后能够一直适应对应的路况。
- 还没有人留言评论。精彩留言会获得点赞!