一种前罩变形装置、控制系统以及方法与流程
本发明涉及汽车车身,具体涉及一种前罩变形装置、控制系统以及方法。
背景技术:
1、汽车前罩又被称为汽车引擎盖,用于对发动机舱进行遮盖,当发生汽车碰撞行人事故时,行人容易和汽车前罩发生硬接触,造成人员伤亡。另外现有技术中前罩存在一些缺陷,如现有技术中提出了一种兼顾刚性及主动行人保护的汽车前罩,包括前罩内板以及设置在所述前罩内板的上侧的前罩外板,所述前罩内板与所述前罩外板之间具有空腔,所述空腔内设置有多个可变刚度支撑机构;多个所述可变刚度支撑机构均包括弹性支撑件、齿条以及锁止组件;所述弹性支撑件的下端与所述前罩内板连接,所述齿条的上下两端分别与所述前罩外板以及弹性支撑件连接;所述锁止组件包括安装支架、齿轮棘轮复合体、棘爪以及驱动组件。其通过在汽车前罩内板和前罩外板之间设置多个可变刚度支撑机构,并通过碰撞传感器对行人即将发生碰撞时进行检测,在发生碰撞时可以缓冲吸能,提供主动行人保护功能。然而,上述汽车前罩虽能保护行人安全,但无法主动变形以改变车辆风格,不能满足用户的使用需求。
技术实现思路
1、本发明的目的之一在于提供一种前罩变形装置,以解决现有技术中的汽车前罩不仅可以保护行人安全、而且可以主动变形改变车辆风格的技术问题;目的之二在于提供一种前罩变形控制系统,可以根据变形指令对汽车前罩进行变形以改变车辆风格、以及根据碰撞指令做出行人保护措施;目的之三在于提供一种前罩变形控制方法。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种前罩变形装置,包括:
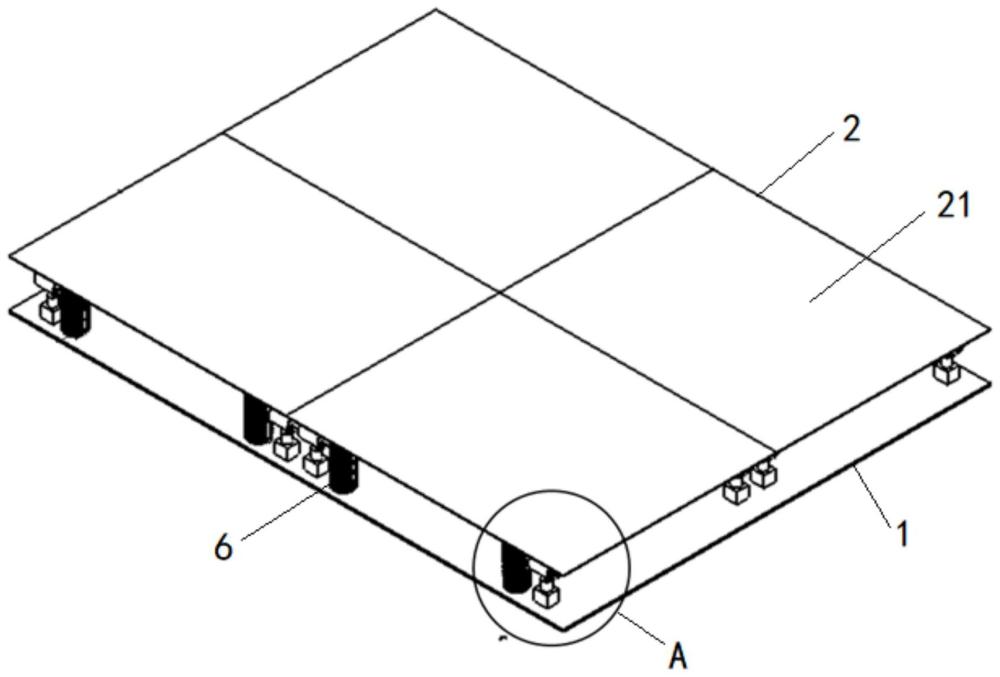
4、前罩内板,固定连接于汽车车身;
5、前罩模块,与所述前罩内板相对布设且数量为多个,多个前罩模块拼接形成前罩外板;
6、缓冲组件,连接于每个所述前罩模块和所述前罩内板之间且数量为多个;
7、支撑组件,连接于每个所述前罩模块和所述前罩内板之间且用于调节两者间的距离和角度;所述支撑组件包括安装于前罩模块的固定单元、安装于前罩内板的伸缩单元、安装于固定单元的第一连接件、以及安装于伸缩单元端部的第二连接件,所述第一连接件与第二连接件连接时,前罩模块由支撑组件支撑,当第一连接件和第二连接分离时,前罩模块由缓冲组件支撑;
8、变形控制器,固设于所述前罩内板且与车身控制器、第一连接件、第二连接件、伸缩单元信号连接。
9、根据上述技术手段,前罩外板由多个前罩模块拼接而成,且每个前罩模块和前罩内板之间均设有支撑组件,因此当第一连接件和第二连接件连接且前罩模块由支撑组件支撑时,在车身控制器的作用下,变形控制器驱动支撑组件运动从而调节前罩模块和前罩内板之间的距离和角度,实现汽车前罩不同目标形态的切换,主动变形来改变车辆风格;还可以在车辆与行人碰撞发生前,变形控制器控制第一连接件和第二连接件分离,此时,前罩模块由缓冲组件支撑,从而利用连接在前罩模块和前罩内板之间的缓冲组件减轻前罩外板对行人的冲击,进而保护行人的安全,可以满足不同的需求。
10、进一步,所述固定单元包括:内部设有安装孔的安装套以及活动安装在所述安装孔内部的球头销,所述安装套固定安装于所述前罩模块,所述球头销远离所述安装套的一端设有凹口,所述伸缩单元端部活动插接于所述凹口内部,所述球头销远离所述安装套的一端设有凹口,所述伸缩单元端部活动插接于所述凹口内部。
11、根据上述技术手段,由于采用球头销和安装套的安装方式,因此当多个伸缩单元进行不同长度的伸缩时,可以带动与之相连的前罩模块相对于前罩内板发生角度的变化。
12、进一步,所述第一连接件、第二连接件两者中一个为与所述变形控制器信号连接的电磁件、两者中的另外一个为磁吸件;或所述第一连接件、第二连接件均为与所述变形控制器信号连接的电磁件。
13、根据上述技术手段,方便在变形控制器的作用下,带动前罩模块和前罩内板两者固定或者发生脱离,以实现对前罩模块和前罩内板支撑的解除和恢复,为车辆与行人发生碰撞时的脱离提供基础。
14、一种用于控制上述前罩变形模块的前罩变形控制系统,包括:
15、信号采集模块,用于采集用户意图信号和行人距离信号,并将采集到的用户意图信号和行人距离信号传输给车机系统模块;
16、车机系统模块,与所述信号采集模块以及车身控制器信号连接,用于通过基础通用模型识别用户意图信号并基于识别结果向车身控制器输出变形指令、用于将行人距离信号与车辆当前刹车距离进行比较并基于比较结果向车身控制器输出碰撞指令、以及用于在行程结束后将用户意图信号和车辆行驶过程数据上传到云端系统模块;
17、变形控制器,与所述车身控制器信号连接,用于接收变形指令并控制第一连接件与第二连接件连接、控制每个伸缩单元进行目标长度伸缩,以及用于接收碰撞指令控制第一连接件与第二连接件分离、伸缩单元与固定单元脱离;
18、云端系统模块,用于对车机系统模块上传的用户意图信号进行学习训练和标定,从而对基础通用模型进行迭代和优化后传回车机系统模块。
19、根据上述技术手段,利用变形控制器控制每个伸缩单元进行目标长度的伸缩,以实现汽车前罩的主动变形;利用车机系统模块可以将行人距离信号与车辆当前刹车距离进行比较,当发现有行人碰撞风险时向车身控制器输出对应碰撞指令,并利用变形控制器控制第一连接件与第二连接件分离,从而带动伸缩单元与固定单元脱离,此时利用设于前罩模块和前罩内板之间的缓冲组件降低行人碰撞时的伤害;因此既可以根据变形指令对汽车前罩进行变形以改变车辆风格,又能根据碰撞指令做出行人保护措施,提升行人安全。
20、进一步,所述信号采集模块至少包括:
21、车内采集单元,包括车内麦克风及车内摄像头,用于实时捕捉用户在车内时的语音信号、面部信号以及肢体信号;
22、车外采集单元,包括车外麦克风及车载环视摄像头,用于实时捕捉用户在车外时的语音信号、面部信号和肢体信号、以及行人距离信号。
23、根据上述技术手段,利用车内采集单元以及车外采集单元,方便对用户在车内以及车外时的语音信号、面部信号以及肢体信号进行采集,同时还可以对行人距离信号进行采集,为车辆即将与行人发生碰撞时的判断提供基础。
24、进一步,还包括:设于所述前罩内板靠近所述前罩模块一侧且与所述车机系统模块信号连接的压力传感模块,所述车机系统模块用于对压力传感模块的压力值进行判定并基于判定结果向车身控制器输出碰撞结束指令。
25、根据上述技术手段,通过压力传感模块检测前罩模块与前罩内板之间的压力值,通过车机系统模块判断行人与前罩模块的碰撞结束。
26、一种前罩变形控制方法,基于上述的前罩变形控制系统实现,包括:
27、步骤s1:信号采集模块实时采集用户意图信号和行人距离信号,并将采集到的信号传输到车机系统模块;
28、步骤s2:车机系统模块对用户意图信号进行识别,并基于识别结果向车身控制器输出用户前期预设的该用户意图信号对应的变形指令,对行人距离信号及刹车距离进行比较判断并基于判断结果向车身控制器输出对应的碰撞指令;
29、步骤s3:根据车机系统模块的变形指令,变形控制器控制第一连接件与第二连接件连接、控制每个伸缩单元进行目标长度伸缩,根据车机系统模块的碰撞指令,变形控制器控制第一连接件与第二连接件分离,伸缩单元与固定单元脱离;
30、步骤s4:行程结束后,车机系统模块识别用户已离开车辆感应区域后,先判断第一连接件、第二连接件及伸缩单元是否复位到初始状态,若是,则直接执行步骤s5,若否,则先控制第一连接件、第二连接件及伸缩单元复位到初始状态,然后再执行步骤s5;
31、步骤s5:车机系统模块将本次行程中的用户意图信号和车辆行驶数据上传到云端系统模块,对基础模型进行迭代学习,学习结束后传回车机系统模块以完成用户意图信号的切换。
32、根据上述技术手段,可以根据变形指令对汽车前罩进行变形以改变车辆风格;车机系统模块还可以对行人距离信号及刹车距离进行比较以判断是否即将与行人发生碰撞,从而在碰撞发生前向车身控制器发出碰撞指令,并利用变形控制器控制第一连接件与第二连接件分离,伸缩单元与固定单元脱离。从而利用缓冲组件减轻汽车前罩对行人的冲击;根据碰撞指令做出行人保护措施从而提升了行人安全。
33、进一步,步骤s2中,
34、所述用户意图信号包括用户的语音信号、面部信号和肢体信号;
35、所述行人距离信号为车载环视摄像头和前方行人对象的直线距离;
36、其中,对行人距离信号及刹车距离进行比较判断并基于判断结果向车身控制器输出对应的碰撞指令包括:
37、获取车载环视摄像头和前方行人对象的直线距离d1;
38、计算车辆的当前刹车距离d;
39、将d与d1进行对比;当d≥d1时,判断为车辆即将与行人碰撞,车机系统模块向车身控制器输出对应的碰撞指令,否则判断为没有碰撞风险;
40、其中,d=v/a,a=μ1x*μ2z,a为当前车辆的制动加速度,μ1和μ2为常数,x为轮胎性能参数,z为刹车性能参数,v为当前车辆的速度。
41、根据上述技术手段,在有碰撞风险时,将对应的碰撞指令发送给车身控制器,并利用变形控制器对第一连接件和第二连接件进行控制,提升碰撞发生时行人的安全。
42、进一步,步骤s2中,车机系统模块对用户意图信号进行识别具体包括:基于预存的图像识别模型对用户的肢体动作和面部表情进行训练标注,基于预存的glm语言模型对用户的语音信号进行训练标注,后期进行迭代优化。
43、根据上述技术手段,利用预存的基础通用模型对用户的肢体动作、面部表情以及语音信号进行识别,以获取用户的真实意图。
44、进一步,步骤s2中还包括:碰撞发生后,车机系统模块接收压力传感模块传送的压力值,将压力值与预设压力值进行比较,当每个压力传感模块受到的压力均小于预设值时,车机系统模块判断车辆碰撞结束并向车身控制器输出碰撞结束指令,车身控制器向变形控制器传输碰撞结束指令,变形控制器控制第一连接件、第二连接件及伸缩单元复位到初始状态。
45、根据上述技术手段,采用压力传感模块对碰撞结束时的压力进行采集,并通过车机系统模块对其进行判断,从而可以在碰撞结束后使得汽车前罩复原。
46、本发明的有益效果:
47、(1)本发明的前罩外板由多个前罩模块拼接而成,且每个前罩模块和前罩内板之间均设有支撑组件,因此当第一连接件和第二连接件连接且前罩模块由支撑组件支撑时,在车身控制器的作用下,变形控制器驱动支撑组件运动从而调节前罩模块和前罩内板之间的距离和角度,实现汽车前罩不同目标形态的切换,主动变形来改变车辆风格;还可以在车辆与行人碰撞发生前,变形控制器控制第一连接件和第二连接件分离,此时,前罩模块由缓冲组件支撑,从而利用连接在前罩模块和前罩内板之间的缓冲组件减轻前罩外板对行人的冲击,进而保护行人的安全,可以满足不同的需求。
48、(2)本发明利用信号采集模块实时在车辆感应区域内采集用户意图信号以及行人距离信号,当采集到用户意图信号后利用车机系统模块预存的基础通用模型对其识别,找出用户意图信号对应的变形指令后将其发送给车身控制器,从而实现根据变形指令对汽车前罩进行变形以改变车辆风格;车机系统模块还可以对行人距离信号及刹车距离进行比较以判断是否即将与行人发生碰撞,从而在碰撞发生前向车身控制器发出碰撞指令,并利用变形控制器控制第一连接件与第二连接件分离,伸缩单元与固定单元脱离。从而利用缓冲组件减轻汽车前罩对行人的冲击;根据碰撞指令做出行人保护措施从而提升了行人安全;而云端系统模块则可以接收用户意图信号和车辆行驶数据,并对基础模型进行迭代学习,以完成用户意图信号的更新和切换,便于下一次使用。
- 还没有人留言评论。精彩留言会获得点赞!