一种面向弱势道路使用者的自动紧急制动控制方法
本公开的实施例涉及紧急制动控制,具体地,涉及适用于一种面向弱势道路使用者的自动紧急制动控制方法。
背景技术:
1、紧急制动是指车辆在行驶过程中遇到紧急情况时,驾驶者迅速、正确的使用制动器,在最短距离内将车停住,紧急制动控制能够让车辆在短距离内停止,有效减少驾驶风险。
2、相关技术中,通过采用车辆中的紧急制动控制系统来对车辆进行紧急制动,紧急制动控制系统是基于相应算法和框架,采用基于数据和基于模型的方法提出相应的控制策略以实现面向弱势道路使用者的自动紧急制动控制。但其忽略了弱势道路使用者的不确定性估计,并且采用的优化算法没有达到很好的预期,导致预测的准确性和稳定性有限,造成车辆制动风险。
技术实现思路
1、本文中描述的实施例提供了一种面向弱势道路使用者的自动紧急制动控制方法,克服了上述问题。
2、根据本公开的内容,提供了一种面向弱势道路使用者的自动紧急制动控制方法,包括:
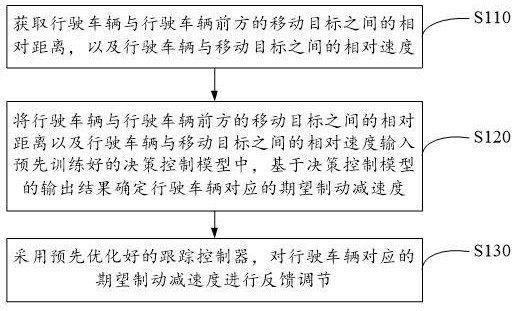
3、获取行驶车辆与所述行驶车辆前方的移动目标之间的相对距离,以及所述行驶车辆与所述移动目标之间的相对速度;
4、将所述行驶车辆与所述行驶车辆前方的移动目标之间的相对距离以及所述行驶车辆与所述移动目标之间的相对速度输入预先训练好的决策控制模型中,基于所述决策控制模型的输出结果确定所述行驶车辆对应的期望制动减速度;
5、采用预先优化好的跟踪控制器,对所述行驶车辆对应的期望制动减速度进行反馈调节,以基于所述行驶车辆对应的期望制动减速度对所述行驶车辆进行紧急制动控制;
6、其中,所述决策控制模型是基于双层前馈神经网络结构训练得出的,所述跟踪控制器是通过对pid控制器进行参数优化得到的。
7、可选的,所述决策控制模型的训练过程,包括:
8、获取训练样本,所述训练样本中包括多组训练数据,每组所述训练数据包括:训练车辆与移动对象之间的相对距离、所述训练车辆与所述移动对象之间的相对速度以及所述训练车辆的期望制动减速度;
9、基于所述训练样本对双层前馈神经网络结构进行训练,得到所述决策控制模型;
10、其中,所述决策控制模型用于基于所述行驶车辆与所述移动目标之间的相对距离以及所述行驶车辆与所述移动目标之间的相对速度,输出所述行驶车辆的期望制动减速度。
11、可选的,所述跟踪控制器的优化过程,包括:
12、获取所述训练车辆的实际反馈减速度;
13、将所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值输入所述pid控制器中,得到所述pid控制器的输出控制值;
14、采用模拟退火算法,基于所述pid控制器的输出控制值对所述pid控制器进行参数优化,得到所述跟踪控制器。
15、可选的,所述采用模拟退火算法,基于所述pid控制器的输出控制值对所述pid控制器进行参数优化,得到所述跟踪控制器,包括:
16、基于所述pid控制器的输出控制值、所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值、第一预设权重系数以及第二预设权重系数,确定所述pid控制器对应的性能评价值;
17、若所述pid控制器对应的性能评价值小于预设评价值,则对所述pid控制器的预设参数进行参数优化,直至基于所述pid控制器的输出控制值、所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值、所述第一预设权重系数以及所述第二预设权重系数,确定出的所述pid控制器对应的性能评价值大于或等于所述预设评价值,则得到所述跟踪控制器。
18、可选的,所述pid控制器对应的输出控制值基于所述预设参数以及所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值确定得出;
19、所述预设参数包括:第一控制参数、第二控制参数和第三控制参数;
20、所述第一控制参数用于描述比例增益;
21、所述第二控制参数用于描述积分时间常数;
22、所述第三控制参数用于描述微分时间常数。
23、可选的,所述pid控制器对应的输出控制值基于所述预设参数以及所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值,采用如下公式计算得出:
24、
25、其中,为所述pid控制器对应的输出控制值, k p为所述第一控制参数, t i为所述第二控制参数, t d为所述第三控制参数,为所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值, t为时间。
26、可选的,所述pid控制器对应的性能评价值基于所述pid控制器的输出控制值、所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值、第一预设权重系数以及第二预设权重系数,采用如下公式计算得出:
27、
28、其中, f为所述pid控制器对应的性能评价值,为第一预设权重系数,为第二预设权重系数。
29、可选的,=0.3。
30、可选的,=0.7。
31、本申请实施例提供的面向弱势道路使用者的自动紧急制动控制方法,获取行驶车辆与行驶车辆前方的移动目标之间的相对距离,以及行驶车辆与移动目标之间的相对速度;将行驶车辆与行驶车辆前方的移动目标之间的相对距离以及行驶车辆与移动目标之间的相对速度输入预先训练好的决策控制模型中,基于决策控制模型的输出结果确定行驶车辆对应的期望制动减速度;采用预先优化好的跟踪控制器,对行驶车辆对应的期望制动减速度进行反馈调节,以基于行驶车辆对应的期望制动减速度对行驶车辆进行紧急制动控制;其中,决策控制模型是基于双层前馈神经网络结构训练得出的,跟踪控制器是通过对pid控制器进行参数优化得到的。如此,通过双层前馈神经网络结构作为决策控制模型的网络结构,具有较好的时效性,并且,采用pid控制器作为紧急制动控制过程中的跟踪控制器,以对车辆进行有效的紧急制动,解决了车辆制动过程中存在风险的问题。
32、上述说明仅是本申请实施例技术方案的概述,为了能够更清楚了解本申请实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本申请实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种面向弱势道路使用者的自动紧急制动控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述决策控制模型的训练过程,包括:
3.根据权利要求2所述的方法,其特征在于,所述跟踪控制器的优化过程,包括:
4.根据权利要求3所述的方法,其特征在于,所述采用模拟退火算法,基于所述pid控制器的输出控制值对所述pid控制器进行参数优化,得到所述跟踪控制器,包括:
5.根据权利要求4所述的方法,其特征在于,所述pid控制器对应的输出控制值基于所述预设参数以及所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值确定得出;
6.根据权利要求5所述的方法,其特征在于,所述pid控制器对应的输出控制值基于所述预设参数以及所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值,采用如下公式计算得出:
7.根据权利要求6所述的方法,其特征在于,所述pid控制器对应的性能评价值基于所述pid控制器的输出控制值、所述训练车辆的期望制动减速度与所述训练车辆的实际反馈减速度的差值、第一预设权重系数以及第二预设权重系数,采用如下公式计算得出:
8.根据权利要求7所述的方法,其特征在于,=0.3。
9.根据权利要求7所述的方法,其特征在于,=0.7。
技术总结
本公开提供一种面向弱势道路使用者的自动紧急制动控制方法,包括:获取行驶车辆与行驶车辆前方的移动目标之间的相对距离,以及行驶车辆与移动目标之间的相对速度;将行驶车辆与行驶车辆前方的移动目标之间的相对距离以及行驶车辆与移动目标之间的相对速度输入预先训练好的决策控制模型中,基于决策控制模型的输出结果确定行驶车辆对应的期望制动减速度;采用预先优化好的跟踪控制器,对行驶车辆对应的期望制动减速度进行反馈调节。从而,通过双层前馈神经网络结构作为决策控制模型的网络结构,具有较好的时效性,并且,采用PID控制器作为紧急制动控制过程中的跟踪控制器,以对车辆进行有效的紧急制动,解决了车辆制动过程中存在风险的问题。
技术研发人员:杨为,王庆林,唐小林
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!