牵引半挂列车及其行驶控制方法、介质和电子设备与流程
本发明属于牵引半挂列车,具体而言,尤其涉及牵引半挂列车及其行驶控制方法、介质和电子设备。
背景技术:
1、目前大部分牵引半挂列车基本都是一辆牵引车连接一辆半挂车的形式,这种配置形式载货量少,货运效率低。而多式联挂,即一辆牵引车连接多辆半挂车的布置形式可以有效提高货物运输效率。但是目前多式联挂的牵引半挂列车只有首部的牵引车可以提供电驱动力,半挂车无动力,导致列车整体的动力性和操纵稳定性较差。
2、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本申请的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的在于提供了牵引半挂列车及其行驶控制方法、介质和电子设备,用于解决目前牵引半挂列车整体的动力性和操纵稳定性较差的问题。
2、根据本申请实施例的一个方面,提供一种牵引半挂列车,包括:
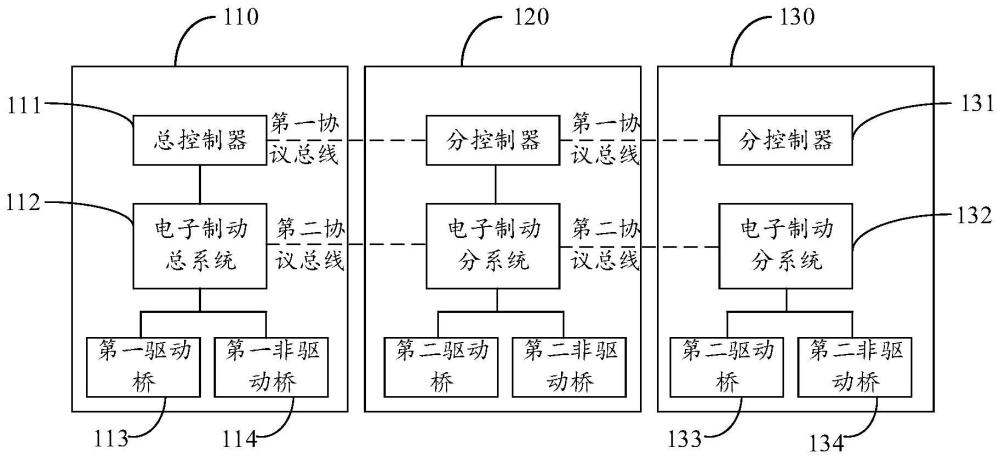
3、牵引车,包括总控制器和电子制动总系统,牵引车用于牵引半挂车;总控制器用于根据加速踏板的开度和当前动力部件转速,确定牵引车的第一驱动力参数和半挂车的第二驱动参数;根据第一驱动力参数控制牵引车加速;电子制动总系统用于根据制动踏板的开度和当前动力部件转速,确定牵引车的第一制动力参数和半挂车的第二制动力参数;根据第一制动力参数控制牵引车制动;
4、半挂车,连接于牵引车的尾部,半挂车包括分控制器和电子制动分系统;分控制器用于根据总控制器提供的第二驱动力参数控制半挂车加速;电子制动分系统用于根据电子制动总系统提供的第二制动力参数控制半挂车制动。
5、在本申请的一种实施例中,牵引车还包括:智能驾驶模块;半挂车包括智能控制转向轴;智能驾驶模块用于获取牵引车的转向轮转动角度,并根据该角度计算并控制半挂车智能控制转向轴的轮胎转动角度。
6、在本申请的一种实施例中,总控制器用于驱动电机的下一时刻预计电制动力最大值,以及根据目标电制动力信号控制驱动电机的输出扭矩;电子制动总系统用于根据下一时刻预计电制动力最大值,对下一时刻的电制动力和机械制动力进行分配,生成驱动电机的目标电制动力信号;以及将目标电制动力信号发送至总控制器。
7、在本申请的一种实施例中,牵引车还包括第一驱动桥和第一非驱动桥;半挂车还包括第二驱动桥和第二非驱动桥;电子制动总系统用于控制第一驱动桥和第一非驱动桥;电子制动分系统用于控制第二驱动桥和第二非驱动桥。
8、在本申请的一种实施例中,主控制器和分控制器挂载于第一协议总线上,并根据第一协议定义地址分区;电子制动总系统和电子制动分系统挂载于第二协议总线上,并根据第二协议进行地址区分。
9、在本申请的一种实施例中,在半挂车的预设位置设置电驱动轴,电驱动轴用于对半挂车进行电辅驱动,以及将半挂车进行制动时的动能转换为电能。
10、在本申请的一种实施例中,半挂车包括多辆半挂车,每辆半挂车均包括分控制器和电子制动分系统;每辆半挂车的行驶状态由对应的分控制器和电子制动分系统进行控制。
11、根据本申请实施例的一个方面,提供一种牵引半挂列车的行驶控制方法,应用于本申请提供的任意一种牵引半挂列车,方法包括:
12、响应于驾驶员对牵引车的操作,根据加速踏板的开度和当前动力部件转速,确定牵引车的第一驱动力参数和半挂车的第二驱动参数;
13、根据制动踏板的开度和当前动力部件转速,确定牵引车的第一制动力参数和半挂车的第二制动力参数;
14、根据第一驱动力参数控制牵引车加速,以及根据第二驱动力参数控制半挂车加速;
15、根据第一制动力参数控制牵引车制动,以及根据第二制动力参数控制半挂车制动。
16、根据本申请实施例的一个方面,提供一种计算机可读介质,其上存储有计算机程序,该计算机程序被处理器执行时实现本申请提供的任意一种牵引半挂列车的行驶控制方法。
17、根据本申请实施例的一个方面,提供一种电子设备,包括:至少一个处理器和存储器,至少一个处理器执行存储器中存储的计算机程序使牵引车和挂车实现本申请提供的任意一种牵引半挂列车的行驶控制方法。
18、在本申请的技术方案中,牵引车包括总控制器和电子制动总系统,半挂车包括分控制器和电子制动分系统,总控制器将驱动力合理分配至相应半挂车的分控制器,电子制动总系统将制动力合理分配至相应半挂车的电子制动分系统,以使分控制器和电子制动分系统共同调控半挂车的行驶状态,使得半挂车可以独立控制自身进行行驶,无需依赖于牵引车的驱动力和制动力,而半挂车又受到牵引车上总控制器和电子制动总系统的间接调控,可以实现牵引车和半挂车整体行驶协调,不会出现半挂车推动牵引车,或者半挂车处于减速而牵引车处于加速的情况,提高牵引半挂列车整体的稳定性。
19、本申请中应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种牵引半挂列车,其特征在于,包括:
2.如权利要求1所述的牵引半挂列车,其特征在于,所述牵引车还包括:智能驾驶模块;所述半挂车包括智能控制转向轴;所述智能驾驶模块用于获取所述牵引车的转向轮转动角度,并根据所述角度计算并控制半挂车智能控制转向轴的轮胎转动角度。
3.如权利要求1所述的牵引半挂列车,其特征在于,所述总控制器用于向所述电子制动总系统发送驱动电机的下一时刻预计电制动力最大值,以及根据目标电制动力信号控制驱动电机的输出扭矩;所述电子制动总系统用于根据下一时刻预计电制动力最大值,对下一时刻的电制动力和机械制动力进行分配,生成驱动电机的目标电制动力信号;以及将所述目标电制动力信号发送至所述总控制器。
4.如权利要求1所述的牵引半挂列车,其特征在于,所述牵引车还包括第一驱动桥和第一非驱动桥;所述半挂车还包括第二驱动桥和第二非驱动桥;所述电子制动总系统用于控制所述第一驱动桥和所述第一非驱动桥;所述电子制动分系统用于控制所述第二驱动桥和所述第二非驱动桥。
5.如权利要求1所述的牵引半挂列车,其特征在于,所述主控制器和所述分控制器挂载于第一协议总线上,并根据第一协议定义地址分区;所述电子制动总系统和所述电子制动分系统挂载于第二协议总线上,并根据第二协议进行地址区分。
6.如权利要求1所述的牵引半挂列车,其特征在于,在所述半挂车的预设位置设置电驱动轴,所述电驱动轴用于对所述半挂车进行电辅驱动,以及将所述半挂车进行制动时的动能转换为电能。
7.如权利要求1所述的牵引半挂列车,其特征在于,所述半挂车包括多辆半挂车,每辆半挂车均包括所述分控制器和所述电子制动分系统;每辆半挂车的行驶状态由对应的所述分控制器和所述电子制动分系统进行控制。
8.一种牵引半挂列车的行驶控制方法,其特征在于,应用于权利要求1-7任意一项所述的牵引半挂列车,所述方法包括:
9.一种计算机可读介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求8所述的牵引半挂列车的行驶控制方法。
10.一种电子设备,其特征在于,包括:
技术总结
本申请公开了牵引半挂列车及其行驶控制方法、介质和电子设备,该牵引半挂列车中的牵引车包括总控制器和电子制动总系统;半挂车包括分控制器和电子制动分系统;总控制器将驱动力分配到相应的分控制器,由该分控制器控制半挂车进行加速;电子制动总系统将制动力分配到相应的电子制动分系统,并由电子制动分系统控制半挂车进行减速,使得半挂车无需依赖于牵引车的驱动力和制动力,可以提高牵引半挂列车整车的行驶响应效率,实现牵引车和半挂车整体行驶协调,提高牵引半挂列车整体的稳定性。
技术研发人员:李晓甫,张世炜,纪传鹏,阳奕鹏
受保护的技术使用者:中集车辆(集团)股份有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!