车速确定方法、装置、车辆以及存储介质与流程
本申请涉及车辆辅助驾驶,更具体地,涉及一种车速确定方法、装置、车辆以及存储介质。
背景技术:
1、随着车辆辅助驾驶技术的不断发展,对于车辆当前行驶速度的估算的准确性需求也越来越高。通常情况下,车辆可以基于卡尔曼滤波算法,获得基于卡尔曼滤波的车速估计值。但对于一些系统资源进展和消息迟滞性较大的系统而言,由于车速估计值的延迟较大,消息的实时性无法保证,导致确定的当前车速不够准确。
技术实现思路
1、鉴于上述问题,本申请提出了一种车速确定方法、装置、车辆以及存储介质,可以确定出更加准确的本车的当前车速。
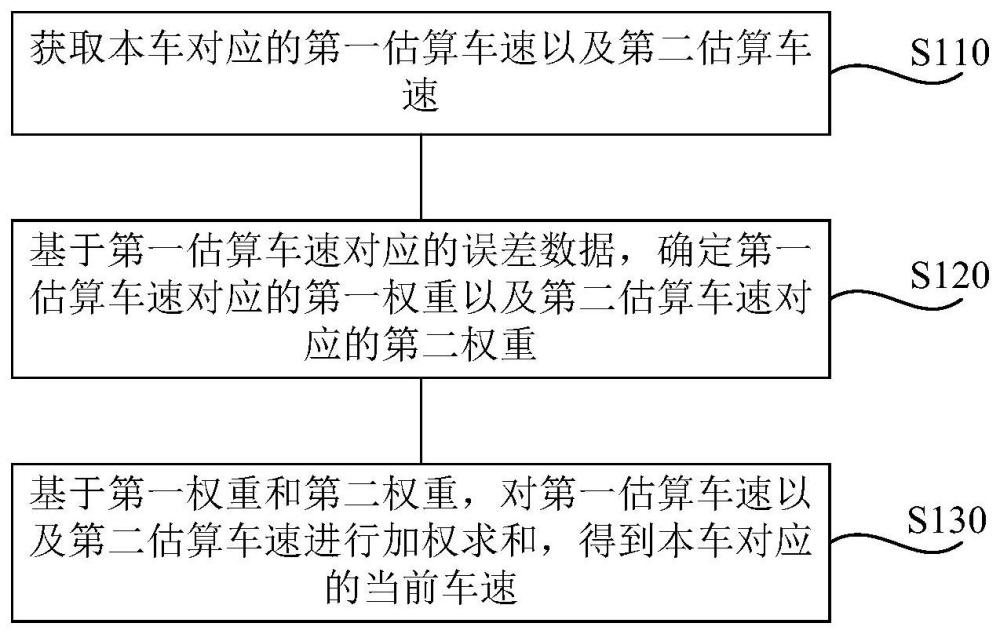
2、第一方面,本申请实施例提供了一种车速确定方法,所述方法包括:获取本车对应的第一估算车速以及第二估算车速,所述第一估算车速为基于预先构建的卡尔曼滤波器估算得到的所述本车的当前行驶速度,所述第二估算车速为基于毫米波雷达设备估算得到的所述本车的当前行驶速度;基于所述第一估算车速对应的误差数据,确定所述第一估算车速对应的第一权重以及所述第二估算车速对应的第二权重;基于所述第一权重和所述第二权重,对所述第一估算车速以及所述第二估算车速进行加权求和,得到所述本车对应的当前车速。
3、第二方面,本申请实施例提供了一种车速确定装置,所述装置包括:车速估算模块、权重确定模块以及车速确定模块。其中,车速估算模块用于获取本车对应的第一估算车速以及第二估算车速,所述第一估算车速为基于预先构建的卡尔曼滤波器估算得到的所述本车的当前行驶速度,所述第二估算车速为基于毫米波雷达设备估算得到的所述本车的当前行驶速度;权重确定模块用于基于所述第一估算车速对应的误差数据,确定所述第一估算车速对应的第一权重以及所述第二估算车速对应的第二权重;车速确定模块用于基于所述第一权重和所述第二权重,对所述第一估算车速以及所述第二估算车速进行加权求和,得到所述本车对应的当前车速。
4、第三方面,本申请实施例提供了一种车辆,包括:一个或多个处理器;存储器;一个或多个应用程序,其中所述一个或多个应用程序被存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序配置用于执行上述第一方面提供的车速确定方法。
5、第四方面,本申请实施例提供了一种计算机可读取存储介质,所述计算机可读取存储介质中存储有程序代码,所述程序代码可被处理器调用执行上述第一方面提供的车速确定方法。
6、本申请提供的方案,通过获取本车对应的第一估算车速以及第二估算车速,第一估算车速为基于预先构建的卡尔曼滤波器估算得到的当前行驶速度,第二估算车速为基于毫米波雷达设备估算得到的当前行驶速度;基于第一估算车速对应的误差数据,确定第一估算车速对应的第一权重以及第二估算车速对应的第二权重;基于第一权重和第二权重,对第一估算车速以及第二估算车速进行加权求和,得到本车对应的当前车速。由此,可以实现根据能够反映基于卡尔曼滤波的第一估算车速的准确程度的误差数据,为第一估算车速以及基于毫米波雷达设备估算得到的第二估算车速,确定相应的权重,进而使得基于获得的权重确定出的当前车速能够更加准确。
技术特征:
1.一种车速确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述误差数据包括输出间隔时长,所述输出间隔时长为所述本车相邻两次获取到的所述第一估算车速之间间隔的时长;
3.根据权利要求2所述的方法,其特征在于,所述若所述输出间隔时长大于第一预设时长,则降低所述第一估算车速对应的基础权重,得到所述第一权重,包括:
4.根据权利要求1所述的方法,其特征在于,所述误差数据包括数值卡顿时长,所述数值卡顿时长为所述本车最近一次的所述第一估算车速保持不变的持续时长;
5.根据权利要求1所述的方法,其特征在于,所述误差数据包括速度差值,所述速度差值为所述第一估算车速与所述第二估算车速之间的差值的绝对值;
6.根据权利要求1-5任一项所述的方法,其特征在于,所述获取本车对应的第一估算车速以及第二估算车速,包括:
7.根据权利要求6所述的方法,其特征在于,所述基于每个所述目标物体对应的运动速度,确定所述本车对应的第二估算车速,包括:
8.一种车速确定装置,其特征在于,所述装置包括:
9.一种车辆,其特征在于,所述车辆包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有程序代码,所述程序代码可被处理器调用执行如权利要求1-7任一项所述的方法。
技术总结
本申请公开了一种车速确定方法、装置、车辆以及存储介质。该方法通过获取本车对应的第一估算车速以及第二估算车速,第一估算车速为基于预先构建的卡尔曼滤波器估算得到的当前行驶速度,第二估算车速为基于毫米波雷达设备估算得到的当前行驶速度;基于第一估算车速对应的误差数据,确定第一估算车速对应的第一权重以及第二估算车速对应的第二权重;基于第一权重和第二权重,对第一估算车速以及第二估算车速进行加权求和,得到本车对应的当前车速。由此根据能够反映基于卡尔曼滤波的第一估算车速的准确程度的误差数据,为第一估算车速以及基于毫米波雷达设备估算得到的第二估算车速确定相应的权重,可以使基于获得的权重确定出的当前车速更加准确。
技术研发人员:祖国强,杜雨航,蔡璐珑,祁玉晓,孙玲
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!