一种面向纵横垂协同控制的车辆运动控制方法
本发明涉及车辆运动控制,尤其是涉及一种面向纵横垂协同控制的车辆运动控制方法。
背景技术:
1、车辆底盘技术中的控制是非常重要的,它涉及到对车辆动态性能、稳定性和安全性的关键影响。底盘是指车辆的悬挂系统、制动系统、转向系统以及与车轮、悬挂系统和车身连接的部分。车辆底盘控制中有以下几点关键控制技术:悬架系统控制、制动系统控制、动力转向系统控制、
2、车辆稳定性控制等。总的来说,车辆控制重要性主要体现在提高操控性能、行驶安全性以及乘坐舒适性方面。
3、车辆底盘的协同控制是基于控制提出的更加高级的技术。是对于控制技术的集成与融合,具有更高的技术难度,但也具有更多的优势和重要性。主要体现在以下几点。(1)综合性能优化:协同控制可以协调多个子系统或组件,使它们以最优方式协同工作,以实现整体系统的最佳性能。在车辆底盘技术中,例如,通过协同控制悬架系统、制动系统和动力系统,可以实现更好的操控性、安全性和燃油效率。(2)系统稳定性:在复杂系统中,协同控制有助于维持系统的稳定性。通过在不同子系统之间共享信息和调整控制策略,可以防止系统产生不稳定行为,提高系统的可靠性。(3)资源分配和利用:协同控制能够有效地分配和利用系统中的各种资源,包括中央处理器的计算资源等。(4)适应性和灵活性:协同控制系统能够适应不同的工作条件和环境变化。这种灵活性对于面对不断变化的工作条件和要求的系统至关重要。(5)故障容忍性:协同控制可以提高系统的故障容忍性。通过在系统中引入冗余控制或备用路径,协同控制系统可以在某个子系统出现故障时自动切换到备用策略,从而保持系统的性能和稳定性。(6)人机协同:在某些应用中,协同控制还可以涉及到人机协同工作。例如,在自动驾驶汽车中,车辆的协同控制需要考虑驾驶员和车辆系统之间的协同作用,以确保安全性和用户体验。
4、协同控制的重要性在于它可以使多个组件或子系统以协调的方式共同工作,以实现系统的综合性能最优化、稳定性、资源利用效率和适应性。这对于现代复杂系统的设计和运行是至关重要的。
5、对于车辆的协同控制,公开号为cn110281912a的发明公开了一种智能车辆横向纵向综合控制系统及控制方法,公开号为cn114919587a的发明公开了一种车辆的横纵向运动协调控制方法,公开号为cn103448716a的发明公开了分布式电驱动车辆纵-横-垂向力协同控制方法。
6、现有方案存在以下缺陷:
7、现存的车辆协同控制方法中,对稳定状态的判断以及运动工况的划分不够完备。如果不提前对于不同工况进行建模分析,在真实复杂的路况场景中车辆难免会出现判断失误,存在潜在风险。如果额外设计算法实时判断当前路况场景,则往往需要与车辆感知层进行通讯设计。未提前做工况划分方法模型复杂度大且臃肿,实际适应度不高,模型的适应度和算法的高效性之间很难权衡。这些问题最终会导致算法复杂,运行速度慢,车辆控制延迟高等缺点。
8、现存的控制权重过于依赖经验方法制定,导致横纵向控制权重分配不合理,使得车辆稳定性下降。抑或是在不同控制模式的过渡不够平滑,导致驾驶员的操控感受下降。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在对稳定状态的判断以及运动工况的划分不够完备,控制权重过于依赖经验方法制定的缺陷而提供一种面向纵横垂协同控制的车辆运动控制方法。
2、本发明的目的可以通过以下技术方案来实现:
3、一种面向纵横垂协同控制的车辆运动控制方法,包括以下步骤:
4、获取车辆数据,根据车辆数据获取质心侧偏角、方向盘转角、横摆角速度、期望纵向加速度和期望横摆角速度数据;
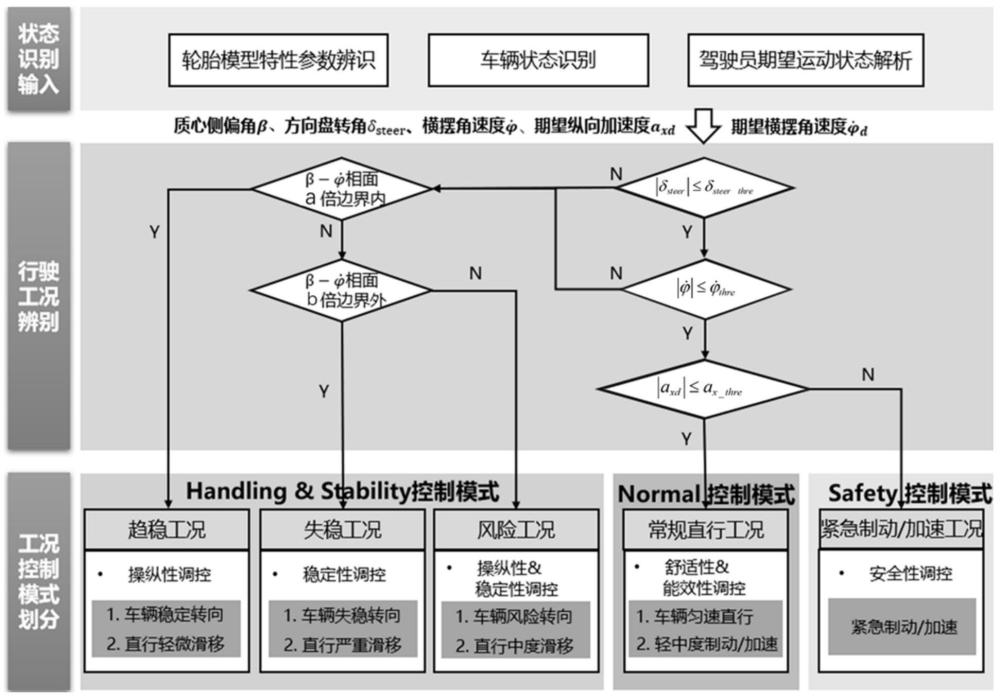
5、根据方向盘转角,判断车辆处于转向运行状态还是直线运动状态;
6、对于转向运行状态,根据预设的相平面,结合获取的质心侧偏角和横摆角速度,将车辆的转向状态划分为趋稳转向工况、风险转向工况和失稳转向工况,并通过预设的操控和稳定控制模式,对趋稳转向工况、风险转向工况和失稳转向工况采用不同的控制函数,进行车辆运动控制;
7、对于直线运行状态,根据车辆的横摆角速度,判断直行状态是否稳定,若直行状态不稳定,则通过相平面,结合获取的质心侧偏角和横摆角速度,将车辆的直行状态划分为趋稳滑移工况、风险滑移工况和失稳滑移工况,并通过所述操控和稳定控制模式,进行车辆运动控制;若直行状态稳定,则根据期望纵向加速度判断是否处于紧急制动或加速状态,若不处于,则通过预设的正常控制模式,从能效性和舒适性进行车辆运动控制,若处于,则通过预设的安全控制模式,从安全性进行车辆运动控制。
8、进一步地,所述方法还包括根据横摆角速度和期望横摆角速度的偏差,确定第二横向控制权重和第二纵向控制权重,从而对操控和稳定控制模式下的车辆运动控制输出进行加权优化;
9、所述操控和稳定控制模式下的车辆运动控制输出包括第一横向控制权重和第一纵向控制权重,加权优化后的车辆运动控制输出的计算表达式为:
10、
11、式中,wlat为加权优化后的横向控制权重,wlon为加权优化后的纵向控制权重,wlat_1为第一横向控制权重,wlon_1为第一纵向控制权重,wlat_2为第二横向控制权重,wlon_2为第二纵向控制权重。
12、进一步地,所述第二横向控制权重wlat_2的确定过程包括:
13、若横摆角速度和期望横摆角速度的偏差的绝对值在预设的第一偏差值以内,则第二横向控制权重wlat_2的值为1,若横摆角速度和期望横摆角速度的偏差的绝对值在预设的第二偏差值以外,则第二向控制权重wlat_2的值为0,所述第二偏差值大于第一偏差值,若横摆角速度和期望横摆角速度的偏差的绝对值在第一偏差值和第二偏差值之间,则按正比例函数确定第二横向控制权重wlat_2的值;
14、所述第二纵向控制权重wlon_2的确定过程包括:
15、wlon_2=1-wlat_2。
16、进一步地,所述相平面包括稳定区域上边界、稳定区域下边界、分别位于稳定区域上边界两侧的b倍稳定区域上边界和a倍稳定区域上边界、以及分别位于稳定区域下边界两侧的a倍稳定区域下边界和b倍稳定区域下边界。
17、进一步地,所述车辆运动控制方法在操控和稳定控制模式下输出用于进行车辆运动控制的第一横向控制权重和第一纵向控制权重,所述第一横向控制权重的计算表达式为:
18、
19、式中,wlat_1为第一横向控制权重,为横摆角速度,β为质心侧偏角,g1为第一边界参数,表示相平面中边界倾斜线段斜率,g2为第二边界参数,表示相平面中边界倾斜线段与纵轴截距,g3为第三边界参数,表示相平面中边界水平线段所在直线与纵轴截距,所述第一边界参数、第二边界参数和第三边界参数均与路面附着系数和纵向车速相关;
20、所述第一纵向控制权重的计算表达式为:
21、wlon_1=1-wlat_1
22、式中,wlon_1为第一纵向控制权重。
23、进一步地,通过将方向盘转角的绝对值与预设的直线行驶时方向盘转角输入门限值对比,若方向盘转角的绝对值较大,则判断车辆处于转向运行状态,否则处于直线运行状态。
24、进一步地,通过将横摆角速度的绝对值与预设的车辆保持稳定直行状态的横摆角速度门限值对比,若横摆角速度的绝对值较大,则直行状态不稳定,否则直行状态稳定。
25、进一步地,通过将期望纵向加速度的绝对值与预设的车辆直行运动状态下紧急制动或加速时的纵向加速度门限值对比,若期望纵向加速度的绝对值较大,则车辆处于紧急制动或加速状态,否则车辆不处于紧急制动或加速状态。
26、进一步地,所述正常控制模式不对横向运动进行额外调控,依赖纵向电机能效性控制和垂向驾乘舒适性控制协同调控车辆运动。
27、进一步地,所述安全控制模式以保障和提升行车安全性作为优化控制目标,实现优化纵向滑移率的同时获得纵向轮胎力的最大利用,使车辆制动或加速。
28、与现有技术相比,本发明具有以下优点:
29、(1)本发明基于相平面稳定性判据进行了车辆运动工况和控制模式的划分,首先根据相平面下不同初始点的相轨迹,确定了稳定区域和失稳区域,并将稳定区域与失稳区域之间划分过渡区域,以使控制系统平滑过渡,对车辆的质心侧偏角和横摆角速度所处的区域,确定趋稳、失稳、风险工况;另外通过判断车辆是否处于直行状态,以及直行状态下的横摆角速度和期望纵向加速度的变化,确定车辆是否具有滑移跑偏的失稳趋势,或者存在紧急制动/加速的需求;
30、针对上述五种工况,提出操控和稳定控制模式handling&stability、正常控制模式normal和安全控制模式safety这三种控制模式;
31、本发明能够精准根据车辆状态进入对应控制模式,能够适应大多数工况并最大程度保障车辆的稳定性,且极大简化了模型和算法的复杂度。
32、(2)本发明提出的纵横向控制权重分配考虑不同工况下的实际情况,进行纵横向控制对于横摆运动的补偿权重分配,能够充分发挥全矢量线控车辆底盘的协同控制能力,使车辆在不同工况下保障操纵稳定性,同时保证了不同工况间切换的平顺。
- 还没有人留言评论。精彩留言会获得点赞!