电机扭矩控制方法、装置、电机控制器及系统与流程
本技术涉及汽车,尤其涉及汽车动力,具体涉及一种电机扭矩控制方法、装置、电机控制器及系统。
背景技术:
1、纯电动汽车包含“三大电”,即“电机、电机控制器和电池”,其中电机是机电复合系统,在机电耦合作用下,存在很多不平稳扭矩干扰,运行过程中容易产生异常抖动的问题;电机控制器通过利用电池的电量,控制电机运转。
2、纯电动汽车传动系统扭振控制设计非常重要,直接关系到整车驾驶性,动力性和经济性。由于实际车辆在坡道定点起步、低附着路面打滑、以及突然踩刹车等非平稳工况下,都会伴随着轮端负载扭矩突增或突减的问题,从而易导致车辆发生抖动,影响驾驶体验。
技术实现思路
1、本技术的目的之一在于提供一种电机扭矩控制方法、装置、电机控制器及系统,用于实现控制电机输出合理的扭矩,避免整车出现异常抖动。
2、为了实现上述目的,本技术采用的技术方案如下:
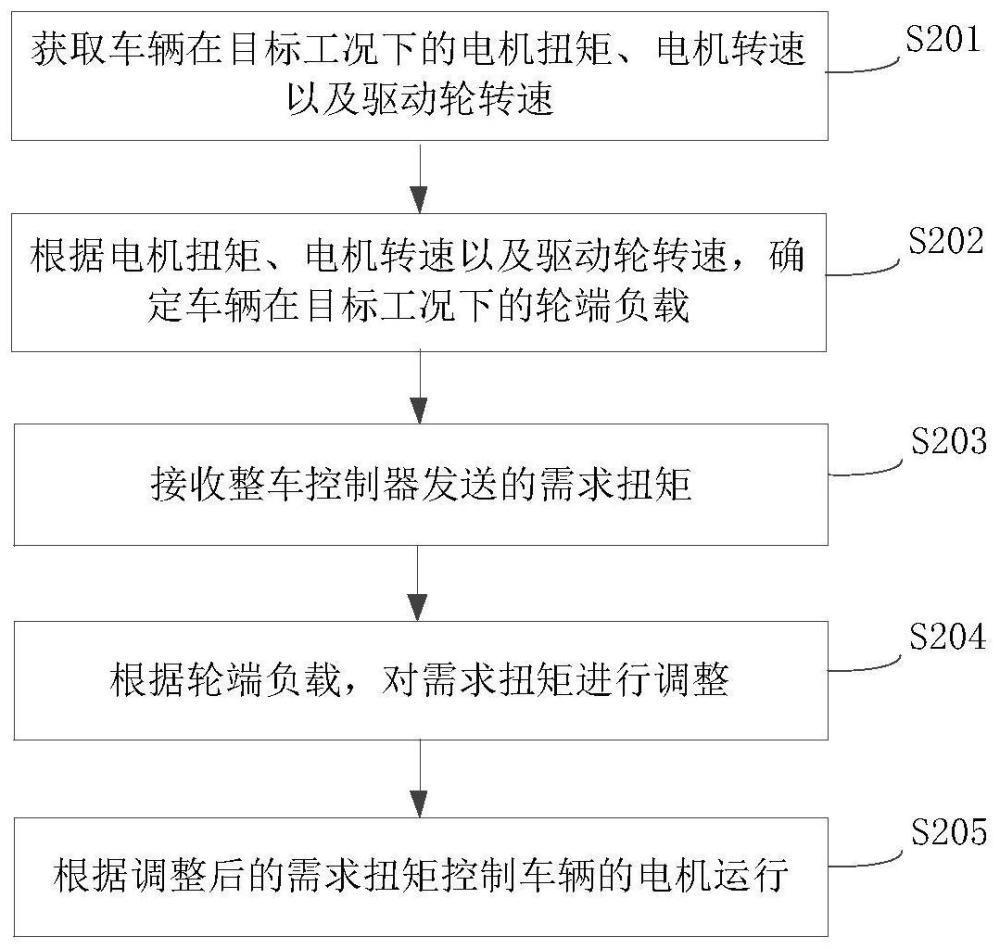
3、根据本技术涉及的第一方面,提供一种电机扭矩控制方法,该方法包括:电机扭矩控制装置获取车辆在目标工况下的电机扭矩、电机转速以及驱动轮转速;并根据电机扭矩、电机转速以及驱动轮转速,确定车辆在目标工况下的轮端负载。进一步的,电机扭矩控制装置接收整车控制器发送的需求扭矩,需求扭矩为基于车辆的控制参数确定到的;并根据轮端负载,对需求扭矩进行调整,进而根据调整后的需求扭矩控制车辆的电机运行。
4、根据上述技术手段,本技术提供的电机扭矩控制方法中,通过获取到的电机转速、驱动轮转速以及电机扭矩计算轮端负载,不需制动信号以及制动触发信号等,克服了相关技术中从底盘控制器接收信号存在延迟的问题,并在得到轮端负载后,基于轮端负载对整车控制器发送的需求扭矩进行调整,以使得电机控制器做出合理判别,避免整车出现异常抖动,提高车辆驾乘平顺性、舒适性,保障驾驶员的驾车体验。
5、在一种可能的实施方式中,上述电机扭矩控制装置根据电机扭矩、电机转速以及驱动轮转速,确定车辆在目标工况下的轮端负载,包括:电机扭矩控制装置根据电机转速以及驱动轮转速,确定半轴负载;进一步根据电机扭矩、电机转速、驱动轮转速以及半轴负载,确定车辆在目标工况下的轮端负载。
6、根据上述技术手段,本技术首先通过获取到的电机转速以及驱动轮转速,计算车辆的半轴负载,进而结合电机扭矩以及计算得到的半轴负载,实现轮端负载的确定。
7、在一种可能的实施方式中,上述电机扭矩控制装置根据电机转速以及驱动轮转速,确定半轴负载,包括:电机扭矩控制装置获取车辆标定的半轴刚度以及半轴阻尼;并根据半轴刚度、半轴阻尼、电机转速、驱动轮转速,确定半轴负载。
8、根据上述技术手段,本技术获取车辆标定的半轴刚度以及半轴阻尼,进而结合获取到的电机转速以及驱动轮转速,计算得到半轴负载,实现半轴负载的确定。
9、在一种可能的实施方式中,上述电机扭矩控制装置根据调整后的需求扭矩控制电机运行,包括:电机扭矩控制装置获取电机母线的电压实测值;并根据调整后的需求扭矩、电机母线的电压实测值以及电机转速,计算控制电流、控制电压以及占空比;进一步控制电机以控制电流、控制电压以及占空比运行。
10、根据上述技术手段,本技术在确定调整后的需求扭矩,也即最终需要执行的扭矩后,根据调整后的需求扭矩,结合电机母线的电压实测值以及电机转速,计算控制电机运行的参数,包括控制电流、控制电压以及占空比,在得到控制参数后,基于计算得到的控制参数实现控制电机以调整后的需求扭矩运行。
11、在一种可能的实施方式中,上述电机扭矩控制装置获取驱动轮转速,包括:电机扭矩控制装置接收底盘控制器发送的驱动轮转速信号;并在驱动轮转速信号指示的转速大于预设转速的情况下,将驱动轮转速信号指示的转速确定为驱动轮转速;进一步在驱动轮转速信号指示的转速小于或等于预设转速的情况下,基于带相位补偿的低通滤波,对驱动轮转速信号进行处理,得到处理后的驱动轮转速信号;并将处理后的驱动轮转速信号指示的转速,确定为驱动轮转速。
12、根据上述技术手段,本技术通过对转速较低的驱动轮转速信号进行处理,提高驱动轮转速信号的精度,进而保障确定到的驱动轮转速的精度,提高轮端负载的准确性。
13、根据本技术提供的第二方面,提供一种电机扭矩控制系统,包括电机控制器、底盘控制器、整车控制器、速度传感器以及电机。电机控制器用于通过速度传感器获取车辆在目标工况下的电机转速。底盘控制器用于向电机控制器发送车辆在目标工况下的驱动轮转速信号。电机控制器还用于根据驱动轮转速信号,确定驱动轮转速。电机控制器还用于根据车辆在目标工况下的电机扭矩、电机转速、驱动轮转速,确定轮端负载。整车控制器用于向电机控制器发送需求扭矩,需求扭矩为基于车辆的控制参数确定到的。电机控制器还用于根据轮端负载,对需求扭矩进行调整,并根据调整后的需求扭矩控制电机运行。
14、在一种可能的实施方式中,电机控制器具体用于确定驱动轮转速信号指示的转速与预设转速的大小关系;并在驱动轮转速信号指示的转速大于预设转速的情况下,将驱动轮转速信号指示的转速确定为驱动轮转速;在驱动轮转速信号指示的转速小于或等于预设转速的情况下,基于带相位补偿的低通滤波,对驱动轮转速信号进行处理,得到处理后的驱动轮转速信号;将处理后的驱动轮转速信号指示的转速,确定为驱动轮转速。
15、根据本技术提供的第三方面,提供一种电机扭矩控制装置,部署于电机控制器,电机扭矩控制装置包括获取单元、确定单元、接收单元以及处理单元。获取单元,用于获取车辆在目标工况下的电机扭矩、电机转速以及驱动轮转速。确定单元,用于根据电机扭矩、电机转速以及驱动轮转速,确定车辆在目标工况下的轮端负载。接收单元,用于接收整车控制器发送的需求扭矩,需求扭矩为基于车辆的控制参数确定到的。处理单元,用于根据轮端负载,对需求扭矩进行调整,并根据调整后的需求扭矩控制电机运行。
16、在一种可能的实施方式中,确定单元,具体用于根据电机转速以及驱动轮转速,确定半轴负载;根据电机扭矩、电机转速、驱动轮转速以及半轴负载,确定车辆在目标工况下的轮端负载。
17、在一种可能的实施方式中,获取单元,还用于获取车辆标定的半轴刚度以及半轴阻尼。确定单元,具体用于根据半轴刚度、半轴阻尼、电机转速、驱动轮转速,确定半轴负载。
18、在一种可能的实施方式中,获取单元,还用于获取电机母线的电压实测值。处理单元,还用于根据调整后的需求扭矩、电机母线的电压实测值以及电机转速,计算控制电流、控制电压以及占空比。处理单元,还用于控制电机以控制电流、控制电压以及占空比运行。
19、在一种可能的实施方式中,接收单元,还用于接收底盘控制器发送的驱动轮转速信号。确定单元,还用于在驱动轮转速信号指示的转速大于预设转速的情况下,将驱动轮转速信号指示的转速确定为驱动轮转速。处理单元,还用于在驱动轮转速信号指示的转速小于或等于预设转速的情况下,基于带相位补偿的低通滤波,对驱动轮转速信号进行处理,得到处理后的驱动轮转速信号。确定单元,还用于将处理后的驱动轮转速信号指示的转速,确定为驱动轮转速。
20、根据本技术提供的第四方面,提供一种电机控制器,部署于车辆。电机控制器包括存储器和处理器,存储器和处理器耦合;存储器用于存储计算机程序代码,计算机程序代码包括计算机指令;当处理器执行计算机指令时,电机控制器执行上述第一方面及其任一种可能的实施方式提供的电机扭矩控制方法。
21、根据本技术提供的第五方面,提供一种计算机可读存储介质,计算机可读存储介质中存储有指令,当指令在电机控制器上运行时,使得电机控制器执行上述第一方面及其任一种可能的实施方式提供的电机扭矩控制方法。
22、根据本技术提供的第六方面,提供一种车辆,包括上述第三方面提供的电机控制器。
23、根据本技术提供的第七方面,提供一种计算机程序产品,计算机程序产品包括计算机指令,当计算机指令在在电机控制器上运行时,使得电机控制器执行上述第一方面及其任一种可能的实施方式提供的电机扭矩控制方法。
24、由此,本技术的上述技术特征具有以下有益效果:
25、(1)本技术提供的电机扭矩控制方法中,通过获取到的电机转速、驱动轮转速以及电机扭矩计算轮端负载,不需制动信号以及制动触发信号等,克服了相关技术中从底盘控制器接收信号存在延迟的问题,并在得到轮端负载后,基于轮端负载对整车控制器发送的需求扭矩进行调整,以使得电机控制器做出合理判别,避免整车出现异常抖动,提高车辆驾乘平顺性、舒适性,保障驾驶员的驾车体验。
26、(2)本技术提供的电机扭矩控制方法中,提出了根据电机转速以及驱动轮转速确定轮端负载,而为了保障轮端负载的精度,本技术通过对转速较低的驱动轮转速信号进行处理,提高驱动轮转速信号的精度,进而保障确定到的驱动轮转速的精度,提高轮端负载的准确性。
27、(3)由于实际车辆在坡道定点起步,低附着路面打滑,以及突然踩刹车过程中,都会伴随着轮端负载扭矩突增或突减的问题,因此,本技术中电机控制器在具备轮端负载识别后,结合识别到的轮端负载确定最终执行扭矩,会使驾驶性计算更加智能和自动化,使乘员感知不到轮端负载突变,使得起步更加平稳、打滑和制动工况更加平顺。
28、需要说明的是,第二方面至第七方面中的任一种实现方式所带来的技术效果可参见第一方面中对应实现方式所带来的技术效果,此处不再赘述。
29、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!