电机控制方法、装置、作业机械、设备及介质与流程
本发明涉及自动控制,尤其涉及一种电机控制方法、装置、作业机械、设备及介质。
背景技术:
1、随着新能源技术的推广,在汽车、作业机械和各种可移动设备领域,均已出现了电动化产品。但是,电动化产品的电池储能有限,节能成为人们关注的焦点,另外,驾乘安全性也是客户的主要需求。
2、以电动作业机械为例,现有的作业机械主要为扭矩控制模式,即加速踏板的开度与电机扭矩成正相关,制动踏板的开度分段控制电机反向扭矩和制动压力。电动作业机械的主要优点是电机扭矩的大小等价于加速度,加速响应快,制动踏板前段回收的能量大;主要缺点是加速踏板稳定时,车速会随着行驶阻力的增加而减少,随着行驶阻力的减少而增加。
3、在驾驶员的实际驾驶过程中,扭矩通过人为控制,经常会出现电机处于低效运行状态的状况,能量浪费严重且安全性较差。
技术实现思路
1、本发明实施例提供一种电机控制方法、装置、作业机械、设备及介质,用以解决现有技术中由于人为控制电动作业机械出现的能量浪费严重和安全性差的问题,实现在电机处于低效运行状态的情况下,自动控制电机,达到节省能源和提高车辆驾驶安全性的目的。
2、本发明实施例提供一种电机控制方法,包括:
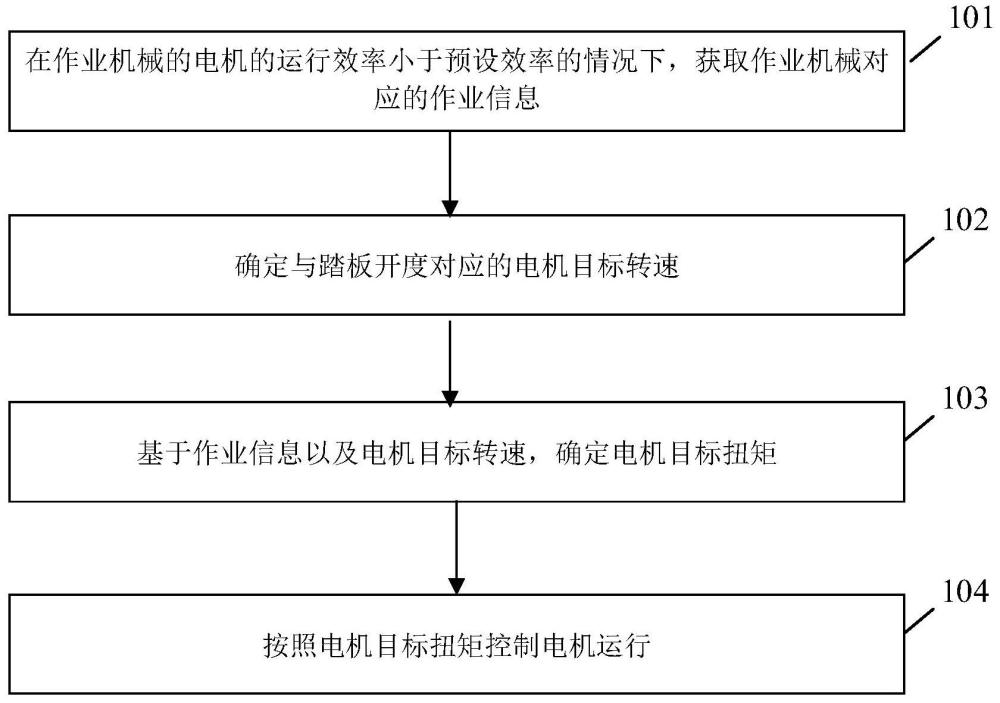
3、在作业机械的电机的运行效率小于预设效率的情况下,获取所述作业机械对应的作业信息,其中,所述作业信息包括:加速踏板的踏板开度;
4、确定与所述踏板开度对应的电机目标转速;
5、基于所述作业信息以及所述电机目标转速,确定电机目标扭矩;
6、按照所述电机目标扭矩控制所述电机运行。
7、根据本发明实施例的电机控制方法,所述作业信息还包括:当前时刻的档位、制动踏板对应的制动压力和电机实际转速;
8、所述基于所述作业信息以及所述电机目标转速,确定电机目标扭矩,包括:
9、在确定所述档位、所述制动压力和所述电机目标转速与所述电机实际转速的大小关系符合预设条件的情况下,基于第一预设映射关系,确定所述电机目标扭矩,其中,所述第一预设映射关系记录所述电机实际转速与所述电机目标扭矩之间的第一对应关系;
10、在确定所述档位、所述制动压力和所述电机目标转速与所述电机实际转速的大小关系中存在至少一项不符合所述预设条件的情况下,基于所述电机目标转速与所述电机实际转速的大小关系,确定所述电机目标扭矩。
11、根据本发明实施例的电机控制方法,所述在确定所述档位、所述制动压力和所述电机目标转速与所述电机实际转速的大小关系符合预设条件的情况下,基于第一预设映射关系,确定所述电机目标扭矩,包括:
12、在确定所述档位非零,所述制动压力为零以及所述电机目标转速大于所述电机实际转速的情况下,基于所述第一预设映射关系,确定与所述电机实际转速对应的所述电机目标扭矩。
13、根据本发明实施例的电机控制方法,所述基于第一预设映射关系,确定所述电机目标扭矩之前,还包括:
14、确定电机实际转速样本和电机目标转速样本的第一对应关系;
15、创建能够反应所述第一对应关系的第一预设映射关系;
16、在测试阶段,基于电机实际转速和电机目标转速,确定修正参数;
17、基于所述修正参数,修正所述第一预设映射关系,得到最终的第一预设映射关系。
18、根据本发明实施例的电机控制方法,所述在确定所述档位、所述制动压力和所述电机目标转速与所述电机实际转速的大小关系中存在至少一项不符合所述预设条件的情况下,基于所述电机目标转速与所述电机实际转速的大小关系,确定所述电机目标扭矩,包括:
19、在确定所述档位非零,所述制动压力为零以及所述电机目标转速大于所述电机实际转速中存在至少一项不成立的情况下,若所述电机目标转速小于所述电机实际转速,基于第二预设映射关系,确定与所述电机实际转速对应的所述电机目标扭矩,其中,所述第二预设映射关系记录所述电机实际转速与所述电机目标扭矩之间的第二对应关系;若所述电机目标转速等于所述电机实际转速,将预设扭矩值确定为所述电机目标扭矩。
20、根据本发明实施例的电机控制方法,所述基于第二预设映射关系,确定与所述电机实际转速对应的所述电机目标扭矩之前,还包括:
21、确定电机实际转速样本和电机目标转速样本的第二对应关系;
22、创建能够反应所述第二对应关系的第二预设映射关系;
23、基于所述制动压力,确定与所述第二预设映射关系对应的增益系数;
24、在测试阶段,基于所述增益系数、电机实际转速和电机目标转速,调整所述第一预设映射关系,得到最终的第二预设映射关系。
25、本发明实施例提供一种电机控制装置,包括:
26、获取模块,用于在作业机械的电机的运行效率小于预设效率的情况下,获取所述作业机械对应的作业信息,其中,所述作业信息包括:加速踏板的踏板开度;
27、第一确定模块,用于确定与所述踏板开度对应的电机目标转速;
28、第二确定模块,用于基于所述作业信息以及所述电机目标转速,确定电机目标扭矩;
29、控制模块,用于按照所述电机目标扭矩控制所述电机运行。
30、本发明实施例还提供一种作业机械,用于实现所述电机控制方法的步骤。
31、本发明实施例还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现所述电机控制方法的步骤。
32、本发明实施例还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述电机控制方法的步骤。
33、本发明实施例提供的电机控制方法、装置、作业机械、设备及介质,通过在作业机械的电机的运行效率小于预设效率的情况下,获取作业机械对应的作业信息;确定与踏板开度对应的电机目标转速;并基于作业信息和电机目标转速,确定电机目标扭矩,按照确定的电机目标扭矩以控制电机的运行,可见,本发明基于踏板开度与电机转速的相关性,得到作业机械的电机处于低效运行状态(即电机的运行效率小于预设效率的情况)下的踏板开度对应的电机目标转速,进而,利用作业信息和电机目标转速,确定的电机目标扭矩进行电机的控制,实现了在电机处于低效运行状态下电机的自动控制,避免了电机处于低效运行状态,节省了能源,并且提高了车辆驾驶的安全性。
技术特征:
1.一种电机控制方法,其特征在于,包括:
2.根据权利要求1所述的电机控制方法,其特征在于,所述作业信息还包括:当前时刻的档位、制动踏板对应的制动压力和电机实际转速;
3.根据权利要求2所述的电机控制方法,其特征在于,所述在确定所述档位、所述制动压力和所述电机目标转速与所述电机实际转速的大小关系符合预设条件的情况下,基于第一预设映射关系,确定所述电机目标扭矩,包括:
4.根据权利要求3所述的电机控制方法,其特征在于,所述基于第一预设映射关系,确定所述电机目标扭矩之前,还包括:
5.根据权利要求2所述的电机控制方法,其特征在于,所述在确定所述档位、所述制动压力和所述电机目标转速与所述电机实际转速的大小关系中存在至少一项不符合所述预设条件的情况下,基于所述电机目标转速与所述电机实际转速的大小关系,确定所述电机目标扭矩,包括:
6.根据权利要求5所述的电机控制方法,其特征在于,所述基于第二预设映射关系,确定与所述电机实际转速对应的所述电机目标扭矩之前,还包括:
7.一种电机控制装置,其特征在于,包括:
8.一种作业机械,其特征在于,用于实现如权利要求1至6任一项所述的电机控制方法的步骤。
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述的电机控制方法的步骤。
10.一种非暂态计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的电机控制方法的步骤。
技术总结
本发明实施例提供一种电机控制方法、装置、作业机械、设备及介质,包括:在作业机械的电机的运行效率小于预设效率的情况下,获取作业机械对应的作业信息,其中,作业信息包括:加速踏板的踏板开度;确定与踏板开度对应的电机目标转速;基于作业信息以及电机目标转速,确定电机目标扭矩;按照电机目标扭矩控制电机运行。本发明用以解决现有技术中由于人为控制电动作业机械出现的能量浪费严重和安全性差的问题,实现在电机处于低效运行状态的情况下,自动控制电机,达到节省能源和提高车辆驾驶安全性的目的。
技术研发人员:陈继勇,张宇翔,黄祖福
受保护的技术使用者:三一海洋重工有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!