驱动电机扭矩控制方法、装置、电子设备、计算机可读存储介质及计算机程序产品与流程
本申请涉及驱动电机技术,尤其涉及一种驱动电机扭矩控制方法、装置、电子设备、计算机可读存储介质及计算机程序产品。
背景技术:
1、混合动力汽车配有高压动力电池、驱动驱动电机/发驱动电机和发动机,系统运行模式复杂。与传统燃油汽车相比的不同之处在于,混合动力汽车上的驱动驱动电机会参与汽车的行驶驱动。同时也意味着驱动驱动电机的扭矩能否准确跟随vecu发出的请求扭矩,对混动汽车的动力性、平顺性、安全性会产生至关重要的影响。
2、在混合动力汽车的控制架构里,车身电子控制系统(vecu,vehicle electroniccontrol unit)会将请求扭矩信号发送给电机控制单元(mcu,motor control unit)。mcu收到来自vecu的扭矩请求信号后计算驱动电机所需的功率来控制驱动电机的扭矩。然而,目前mcu的算法可靠性不够,对功率的计算不够准确,从而无法准确控制驱动电机扭矩。
技术实现思路
1、本申请实施例提供一种驱动电机扭矩控制方法、装置、电子设备、计算机可读存储介质及计算机程序产品,能够提高对驱动电机扭矩控制的准确性。
2、本申请实施例的技术方案是这样实现的:
3、本申请实施例提供一种驱动电机扭矩控制方法,包括:
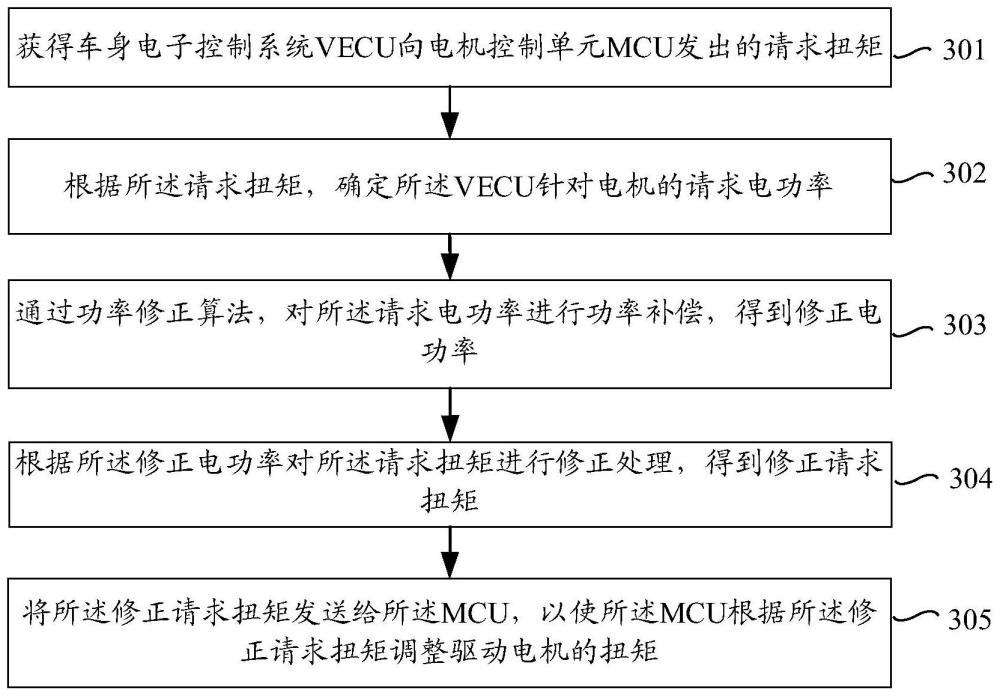
4、获得车身电子控制系统vecu向电机控制单元mcu发出的请求扭矩;
5、根据所述请求扭矩,确定所述vecu针对驱动电机的请求电功率;
6、通过功率修正算法,对所述请求电功率进行功率补偿,得到修正电功率;
7、根据所述修正电功率对所述请求扭矩进行修正处理,得到修正请求扭矩;
8、将所述修正请求扭矩发送给所述mcu,以使所述mcu根据所述修正请求扭矩调整驱动驱动电机的扭矩。
9、上述方案中,所述根据所述请求扭矩,确定所述vecu针对驱动电机的请求电功率,包括:
10、确定驱动驱动电机的驱动电机转速及驱动电机效率;
11、根据所述请求扭矩、所述驱动电机转速及所述驱动电机效率,确定所述vecu针对驱动电机的请求电功率。
12、上述方案中,通过功率修正算法,对所述请求电功率进行功率补偿,得到修正电功率,包括:
13、确定电池管理系统的第一功率、直流直流dcdc转换器的第二功率及发动机的第三功率;
14、计算所述第二功率、所述第三功率及所述请求电功率的功率之和,得到第四功率;
15、计算所述第一功率与所述第四功率之间的差值,得到误差功率;
16、基于所述误差功率,通过功率修正算法,对所述请求电功率进行功率补偿,得到修正电功率。
17、上述方案中,所述基于所述误差功率,通过功率修正算法,对所述请求电功率进行功率补偿,得到修正电功率,包括:
18、基于所述误差功率,通过短时功率修正算法,对所述请求电功率进行第一功率补偿,得到短时修正电功率;
19、基于所述误差功率,通过长时功率修正算法,对所述请求电功率进行第一功率补偿,得到长时修正电功率;
20、计算所述短时修正电功率与所述长时修正电功率的功率之和,得到所述修正电功率。
21、上述方案中,所述基于所述误差功率,通过长时功率修正算法,对所述请求电功率进行第一功率补偿,得到长时修正电功率,包括:
22、确定驱动驱动电机的驱动电机转速;
23、获得长时修正表,所述长时修正表包括驱动电机转速、请求扭矩与长时修正电功率的对应关系;
24、基于所述驱动电机转速及所述请求扭矩,从所述长时修正表中确定对应的所述长时修正电功率。
25、上述方案中,所述根据所述修正电功率对所述请求扭矩进行修正处理,得到修正请求扭矩,包括:
26、确定驱动驱动电机的驱动电机转速及驱动电机效率;
27、根据所述修正电功率、所述驱动电机转速及所述驱动电机效率,对所述请求扭矩进行修正处理,得到修正请求扭矩。
28、本申请实施例提供一种驱动电机扭矩控制装置,包括:
29、获得模块,用于获得车身电子控制系统vecu向电机控制单元mcu发出的请求扭矩;
30、确定模块,用于根据所述请求扭矩,确定所述vecu针对驱动电机的请求电功率;
31、功率补偿模块,用于通过功率修正算法,对所述请求电功率进行功率补偿,得到修正电功率;
32、修正模块,用于根据所述修正电功率对所述请求扭矩进行修正处理,得到修正请求扭矩;
33、发送模块,用于将所述修正请求扭矩发送给所述mcu,以使所述mcu根据所述修正请求扭矩调整驱动驱动电机的扭矩。
34、本申请实施例提供一种电子设备,包括:
35、存储器,用于存储可执行指令;
36、处理器,用于执行所述存储器中存储的可执行指令时,实现本申请实施例提供的驱动电机扭矩控制方法。
37、本申请实施例提供一种计算机可读存储介质,存储有可执行指令,用于引起处理器执行时,实现本申请实施例提供的驱动电机扭矩控制方法。
38、本申请实施例提供一种计算机程序产品,存储有计算机程序,用于引起处理器执行时,实现本申请实施例提供的驱动电机扭矩控制方法。
39、本申请实施例通过获得车身电子控制系统vecu向电机控制单元mcu发出的请求扭矩;根据所述请求扭矩,确定所述vecu针对驱动电机的请求电功率;通过功率修正算法,对所述请求电功率进行功率补偿,得到修正电功率;根据所述修正电功率对所述请求扭矩进行修正处理,得到修正请求扭矩;将所述修正请求扭矩发送给所述mcu,以使所述mcu根据所述修正请求扭矩调整驱动驱动电机的扭矩,提高了对驱动电机扭矩控制的准确性。
技术特征:
1.一种驱动电机扭矩控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述请求扭矩,确定所述vecu针对驱动电机的请求电功率,包括:
3.根据权利要求1所述的方法,其特征在于,通过功率修正算法,对所述请求电功率进行功率补偿,得到修正电功率,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述误差功率,通过功率修正算法,对所述请求电功率进行功率补偿,得到修正电功率,包括:
5.根据权利要求3所述的方法,其特征在于,所述基于所述误差功率,通过长时功率修正算法,对所述请求电功率进行第一功率补偿,得到长时修正电功率,包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述修正电功率对所述请求扭矩进行修正处理,得到修正请求扭矩,包括:
7.一种驱动电机扭矩控制装置,其特征在于,包括:
8.一种电子设备,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,存储有可执行指令,用于被处理器执行时,实现权利要求1至6任一项所述的驱动电机扭矩控制方法。
10.一种计算机程序产品,其特征在于,存储有计算机程序,用于被处理器执行时,实现权利要求1至6任一项所述的驱动电机扭矩控制方法。
技术总结
本申请提供了一种驱动电机扭矩控制方法、装置、电子设备、计算机可读存储介质及计算机程序产品;方法包括:获得车身电子控制系统VECU向电机控制单元MCU发出的请求扭矩;根据所述请求扭矩,确定所述VECU针对驱动电机的请求电功率;通过功率修正算法,对所述请求电功率进行功率补偿,得到修正电功率;根据所述修正电功率对所述请求扭矩进行修正处理,得到修正请求扭矩;将所述修正请求扭矩发送给所述MCU,以使所述MCU根据所述修正请求扭矩调整驱动驱动电机的扭矩。通过本申请,能够提高对驱动电机扭矩控制的准确性。
技术研发人员:张昊,李海波,陈鹏,权卫平,廖云峰
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!