转向架及轨道车辆的制作方法
1.本发明属于轨道车辆的技术领域,尤其涉及一种转向架及轨道车辆。
背景技术:
2.现有的轨道车辆存在部分车辆,需要在双轨道上运行。这一类型的轨道车辆包括左走行轮及右走行轮,左走行轮及右走行轮分别在双轨道的左轨道及右轨道上走行,受限于双轨道的加工及工艺限制,左轨道和右轨道难以保证在同一平面,在轨道车辆行驶过程中,会造成车辆振动大,导致舒适性差。
技术实现要素:
3.本发明所要解决的技术问题是:受限于双轨道的加工及工艺限制,两侧轨道的平行度难以保证,从而在轨道车辆的行驶过程中导致的车辆振动大及舒适性差的技术问题。
4.为解决上述技术问题,本发明实施例提供一种用于轨道车辆的转向架,包括:走行轮;导向架;多连杆机构,所述多连杆机构连接所述导向架与所述走行轮;及走行机构,所述走行机构包括转向节叉及摆臂,所述转向节叉与所述走行轮的轮毂总成转动连接,所述摆臂的一端与所述转向节叉转动连接,所述摆臂的另一端与车体转动连接;所述走行机构及所述走行轮均设有两个,两个所述走行机构分别与两个所述走行轮对应设置,两个所述走行机构的所述摆臂分离设置。
5.可选地,两个所述走行机构沿轨道车辆的宽度方向对称分布。
6.可选地,在沿轨道车辆的宽度方向的竖直平面内,两个所述走行机构的投影存在部分重合。
7.可选地,所述摆臂设有多个,多个所述摆臂包括第一摆臂及第二摆臂,所述转向节叉具有互成角度的第一臂及第二臂,所述第一臂与所述第一摆臂转动连接,所述第二臂与所述第二摆臂转动连接,所述第一臂与所述第二臂的连接处通过一转向节与所述走行轮的轮毂总成转动连接,所述第一摆臂远离所述第一臂的一端与所述车体转动连接,所述第二摆臂远离所述第二臂的一端与所述车体转动连接。
8.可选地,所述第一摆臂设有两个,两个第一摆臂沿车辆的长度方向对称连接在所述第一臂的两侧;所述第二摆臂设有两个,两个所述第二摆臂沿车辆的长度方向对称连接在所述第二臂的两侧。
9.可选地,两个所述走行机构,其中一个走行机构的一个第二摆臂位于另一个走行机构的两个第二摆臂之间。
10.可选地,所述转向架还包括第一安装座及第二安装座,所述第一摆臂远离第一臂
的一端与所述第一安装座转动连接,所述第二摆臂远离所述第二臂的一端与所述第二安装座转动连接,所述第一安装座与所述第二安装座适于与车体固定连接。
11.可选地,所述转向架还包括多连杆机构,所述多连杆机构与所述走行轮的轮毂总成连接且与车体转动连接,所述多连杆机构设有两个,两个所述多连杆机构分别与两个所述走行轮连接,两个所述多连杆机构转动连接,两个所述多连杆机构中的其中一个与所述导向架转动连接。
12.可选地,所述转向架还包括内圈和外圈,所述内圈和所述外圈能够相对转动,所述内圈和所述外圈的其中一个与所述导向架固定连接,另一个与车体连接。
13.可选地,所述转向架还包括弹性件,所述内圈和所述外圈,所述弹性件的一端与其中一个连接,所述弹性件的另一端与另一个连接,以使所述弹性件在所述导向架转动时能够发生形变。
14.本发明实施例提供的转向架,两个走行机构的摆臂分离设置,从而使得两个走行机构分离设置,互不影响,这样,与两个走行机构连接的两个走行轮也相互独立,当轨道的两侧处于不同平面时,两个走行轮在竖直方向上的位移,不会互相影响,从而降低了左右不平的轨道对轨道车辆产生的影响,减小了轨道车辆的振动,提高了舒适性。与此同时,走行机构与车体连接,而不需要在导向架上设置车桥,从而也减小了导向架的重量。
15.本发明另一实施例还提供一种轨道车辆,包括上述的转向架。
附图说明
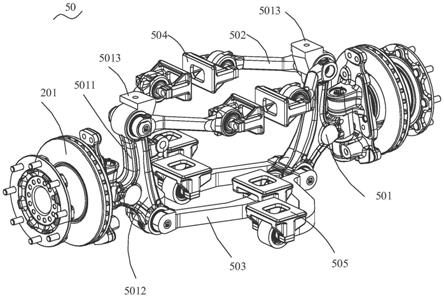
16.图1是本发明实施例提供的转向架的示意图;图2是图1所示的转向架的走行机构的示意图;图3是图1的转向架的俯视图;图4是本发明实施例提供的转向架的示意图(包括多连杆机构);图5是图4所示的转向架的多连杆机构的俯视图;图6是本发明实施例提供的转向架的示意图;图7是图6所示的转向架的仰视图;图8是本发明实施例提供的转向架的部分结构示意图;图9是图8所示的部分转向架的爆炸图;图10是本发明实施例提供的转向架的示意图(包括动力机构);图11是图10所示的转向架的动力总成的示意图。
17.说明书中的附图标记如下:10、走行轮;101、轮毂总成;20、导向轮;201、导向轮轴;30、多连杆机构;301、第一连杆;302、第二连杆;303、转向摆臂;304、第三连杆;305、车体安装座;40、导向架;50、走行机构;501、转向节叉;5011、第一臂;5012、第二臂;5013、悬挂安装座;502、第一摆臂;503、第二摆臂;504、第一安装座;505、第二安装座;60、悬挂;
70、减振器;801、内圈;802、外圈;8021、安装口;803、弹性件;804、弹性件安装座;805、耐磨片;90、动力总成;901、电机;902、变速箱;903、差速器;904、传动机构。
18.具体实施方式
19.为了使本发明所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合实施例,对本发明进行进一步的详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
20.如图1至图11所示,本发明实施例提供一种轨道车辆的转向架,包括走行轮10、导向架40、多连杆机构30及走行机构50,走行轮10通过多连杆机构30与导向架40连接,走行机构50包括走行机构50包括转向节叉501及摆臂,转向节叉501与走行轮10的轮毂总成101转动连接,摆臂的一端与转向节叉501转动连接,摆臂的另一端与车体转动连接,走行轮10及走行机构50均设有两个,两个走行机构50与两个走行轮10对应设置,两个走行机构50的摆臂分离设置,以此实现两个走行机构50的分离设置。
21.本发明实施例提供的转向架,两个走行机构50的摆臂分离设置,从而使得两个走行机构50分离设置,互不影响,这样,与两个走行机构50连接的两个走行轮10也相互独立,当轨道的两侧处于不同平面时,两个走行轮10在竖直方向上的位移,不会互相影响,从而降低了左右不平的轨道对轨道车辆产生的影响,减小了轨道车辆的振动,提高了舒适性。与此同时,走行机构50与车体连接,而不需要在导向架40上设置车桥,从而也减小了导向架40的重量。
22.如图2所示,两个走行机构50沿轨道车辆的宽度方向对称分布。在沿轨道车辆的宽度方向的竖直平面内,两个走行机构50的投影存在部分重合,也就是说,在轨道车辆的宽度方向上,其中一个走行机构50延伸至另一个走行机构50的空间范围内。这样,缩小了转向架在轨道车辆上的宽度方向上的延伸长度,能够缩小两个走行轮10的轮距,有利于减小轨道车辆的转弯半径。
23.在如图2所示的实施例中,摆臂设有多个,且包括第一摆臂502及第二摆臂503,转向节叉501具有互成角度的第一臂5011及第二臂5012,第一臂5011与第一摆臂502转动连接,第二臂5012与第二摆臂503转动连接,第一臂5011与第二臂5012的连接处通过转向节与走行轮10的轮毂总成101转动连接,第一摆臂502远离第一臂5011的一端与车体转动连接,第二摆臂503远离第二臂5012的一端与车体转动连接。由于第一摆臂502及第二摆臂503均与车体转动连接,能够缓解车体与转向架之间的转动,提高乘车舒适性。
24.在一具体的实施例中,第一摆臂502远离第一臂5011的一端通过关节轴承与第一安装座504转动连接,第二摆臂503远离第二臂5012的一端通过关节轴承与第二安装座505转动连接,第一安装座504及第二安装座505均与车体连接,从而实现第一摆臂502及第二摆臂503与车体的转动连接。第一臂5011与第二臂5012均位于水平面上,第一安装座504能够以轨道车辆的长度方向为轴向转动,第二安装座505也能够以轨道车辆的长度方向为轴向转动,从而能够避免走行轮10的竖直方向上的位移对车体造成影响。
25.可以理解的是,为了进一步消除走行轮10的竖直方向上的位移对车体的影响,第
一摆臂502及第二摆臂503均能够以轨道车辆的长度方向为轴向分别相对于第一臂5011及第二臂5012转动。
26.在如图2所示的实施例中,第一摆臂502及第二摆臂503均设有两个,两个第一摆臂502沿轨道车辆的长度方向对称连接在第一臂5011的两侧,两个第二摆臂503沿轨道车辆的长度方向对称连接在第二臂5012的两侧。将两个第一摆臂502及两个第二摆臂503对称设置,增强了结构稳定性,从而使得走行轮10与车体的连接更加稳定。
27.在一具体的实施例中,第一摆臂502位于第二摆臂503的上方,两个走行机构50的第一摆臂502在轨道车辆的宽度方向上间隔设置,其中一个走行机构50的第二摆臂503由第二臂5012沿轨道车辆的宽度方向延伸至另一个走行机构50的两个第二摆臂503之间,实现两个走行机构50在沿轨道车辆的宽度方向的竖直平面内的投影存在部分重合。可以理解的是,当其中一个走行机构50的第二摆臂503位于另一个走行机构的两个第二摆臂503之间时,并没有连接关系,仍然分离间隔设置。
28.在其他实施例中,可以是,其中一个走行机构50的第一摆臂502由第一臂5011沿轨道车辆的宽度方向延伸至另一个走行机构50的两个第一摆臂502之间,以实现两个走行机构50在沿轨道车辆的宽度方向的竖直平面内的投影存在部分重合。此时,两个走行机构50的第二摆臂503在轨道车辆的宽度方向上间隔设置。还可以是,两个走行机构50的第一摆臂502在轨道车辆的宽度方向上间隔设置,两个走行机构50的第二摆臂503也在轨道车辆的宽度方向上间隔设置。也可以是,其中一个走行机构50的第一摆臂502由第一臂5011沿轨道车辆的宽度方向延伸至另一个走行机构50的两个第一摆臂502之间,其中一个走行机构50的第二摆臂503也由第二臂5012沿轨道车辆的宽度方向延伸至另一个走行机构50的两个第二摆臂503之间。
29.如图2及图6所示,两个第一摆臂502与第一臂5011的连接处形成有悬挂安装座5013,悬挂60的一端固定在悬挂安装座5013上,一端与车体连接。第一臂5011与第二臂5012的连接处的朝向另一个走行机构50的位置形成为减振器安装座,减振器70的一端固定在减振器安装座上,一端与车体连接。
30.在一实施例中,悬挂60由悬挂安装座5013沿竖直方向延伸,以缓冲垂向载荷,减振器70由减振器安装座向上且向靠近另一个走行机构50的方向延伸,以缓冲横向载荷及垂向载荷。
31.在如图1至图11所示的实施例中,导向轮20通过导向轮轴201连接在导向架40上,多连杆机构30与走行轮10连接且与车体转动连接,多连杆机构30设有两个且两个多连杆机构30之间转动连接。两个多连杆机构30分别与两个走行轮10连接,两个多连杆机构30中的其中一个与导向架40连接。
32.本发明提供的转向架的转向原理为:导向轮20的转向带动导向架40的转动,导向架40的转动带动其中一个多连杆机构30的转动,其中一个多连杆机构30的转动带动与之连接的走行轮10转向及另一个多连杆机构30转动,另一个多连杆机构30的转动带动与之连接的另一个走行轮10转向,从而使得导向轮20的转动能够通过导向架40及多连杆机构30的转动带动走行轮10的转向。本发明的用于实现轨道车辆转向的多连杆机构30与车体连接,且只有一个多连杆机构30与导向架40连接实现导向轮20到走行轮10的转向传递,即,车体承担了多连杆机构30的大部分重量,故而降低了导向架40的重量,同时也减小了导向轮20的
负载和磨损。
33.本文所指的与车体连接,可以是直接与车体连接,也可以是通过支架等与车体间接连接。
34.在其他实施例中,还可以是多连杆机构设有一个,该多连杆机构具有两端,两端分别与两个走行轮10连接,依此实现多连杆机构连接走行轮10及转向架40。
35.在一实施例中,走行轮10包括轮胎及上述的轮毂总成101,轮胎安装在轮毂总成101上,多连杆机构30与轮毂总成101连接。具体来说,多连杆机构30的一端与轮毂总成101固定连接。
36.如图3及图4所示,多连杆机构30包括转动连接的第一连杆301及第二连杆302,第一连杆301能够相对于第二连杆302在竖直方向上摆动。这样,一个走行轮10独立跳动,其竖直方向上的位移会通过第一连杆301及第二连杆302在竖直方向上的相对摆动消除,并不会传递到导向架40,从而不会影响轨道车辆的转向及另一个走行轮10。
37.在一具体的实施例中,第一连杆301与第二连杆302通过球铰实现转动连接,并将球铰的球铰座的开口朝上,球铰杆沿竖直方向延伸,以使第一连杆301与第二连杆302之间既可以实现在竖直方向上的相对摆动,又可以实现第一连杆301与第二连杆302绕竖直轴线的相对转动。
38.如图4所示,多连杆机构30还包括转向摆臂303,第二连杆302与转向摆臂303转动连接,第二连杆302能够相对于转向摆臂303在竖直方向上摆动。进一步消除了独立跳动的走行轮10在竖直方向上的位移产生的影响。
39.在一具体的实施例中,第一连杆301与第二连杆302的转动连接处、第二连杆302与转动摆臂的转动连接处分别位于第二连杆302的竖直方向上的两侧,从而使第一连杆301相对于第二连杆302在竖直方向上的摆动量与第二连杆302相对于转向摆臂303在竖直方向上的摆动量能够叠加,从而能够更多地消除走行轮10在竖直方向上的位移量对轨道车辆的转向及另一个走行轮10的影响。
40.如图1及图2所示,第一连杆301位于第二连杆302的上方,转向摆臂303位于第二连杆302的下方。
41.在其他实施例中,还可以是,第一连杆301位于第二连杆302的下方,转向摆臂303位于第二连杆302的上方。
42.在一实施例中,第一连杆301与走行轮10连接,转向摆臂303与车体转动连接以使转向摆臂303能够相对于车体沿竖直轴线转动。这样,走行轮10的跳动传递给第一连杆301,由第一连杆301与第二连杆302之间的转动连接以及第二连杆302与转向摆臂303的转动连接吸收,从而避免走行轮10的跳动会对轨道车辆的转向产生影响。转向摆臂303与车体转动连接,既实现了多连杆机构30与车体的连接,减轻了导向架40的重量,而且转向摆臂303的转动不会传递给车体,保证了车体的稳定性。
43.在其他实施例中,走行轮10还可以通过一个连杆或者多个连杆与第一连杆301转动。
44.在一具体的实施例中,第一连杆301与走行轮10的轮毂总成101固定连接。第二连杆302与转向摆臂303通过球铰连接,转向摆臂303上设置有球铰,球铰与车体安装座305转动连接,车体安装座305与车体固定连接,以此实现转向摆臂303与车体的连接。
45.在一实施例中,多连杆机构30还包括第三连杆304,两个多连杆机构30,其中一个的第三连杆304与导向架40转动连接,另一个的第三连杆304用于连接两个多连杆机构30。以使导向架40的转动能够由与导向架40连接的第三连杆304传递给对应的走行轮10,并通过连接两个多连杆机构30的第三连杆304传递给另一个走行轮10,从而带动两个走行轮10的转动。
46.在一具体的实施例中,第三连杆304与转向摆臂303连接,通过转向摆臂303及第二连杆302实现与第一连杆的间接转动连接,导向架40的转动依次通过第三连杆304、转向摆臂303、第二连杆302及第一连杆301将导向架40的转动传递给走行轮10。连接两个多连杆机构30的第三连杆304分别与两个多连杆机构30的转向摆臂303转动连接,与导向架40连接的第三连杆304,一端与转向摆臂303转动连接,另一端与导向架40转动连接。
47.具体地,第三连杆304与转向摆臂303也通过球铰连接。如图3及图4所示,其中一个第三连杆304位于转向摆臂303的上方,另一个第三连杆304位于转向摆臂303的下方。这样有利于第三连杆304的布置,同时也提高了空间利用率。具体地,与导向架40连接的第三连杆304位于转向摆臂303的下方,连接两个多连杆机构30的第三连杆304位于转向摆臂303的上方。这样,能够使多连杆机构30以最短距离实现走行轮10与导向架40的连接以及两个多连杆机构30的连接,从而减小了多连杆机构30的部件数量以及部件尺寸,同时也降低了多连杆机构30在竖直方向上占有的空间。
48.在一具体的实施例中,两个转向摆臂303的上表面位于同一平面,从而能够减小两个多连杆机构30在竖直方向上占用的空间。
49.然而,在实际应用过程中,两个转向摆臂303的上表面可以在竖直方向上交错布置。
50.在一实施例中,在轨道车辆的长度方向上,两个多连杆机构30机构设置在走行轮10的同一侧,且沿轨道车辆的宽度方向分布。现有技术中的连接走行轮与导向架的结构一般分布在走行轮的两侧,占用空间较大,本发明的多连杆机构30连接走行轮10及导向架40,只分布在走行轮10的一侧,从而释放了走行轮10的另一侧的空间,有利于其他零部件的布置。
51.如图4、图8及图9所示,转向架还包括内圈801和外圈802,内圈801和外圈802能够相对转动,内圈801和外圈802的其中一个与导向架40固定连接,另一个与车体连接。当导向架40转动时,内圈801和外圈802相对转动,实现导向架40与车体的相对转动。此外,将内圈801和外圈802其中一个固定在导向架40上,一个与车体连接,车体也承担内圈801和外圈802的一部分重量,从而能够进一步减少导向架40的重量,从而进一步减小悬挂60下方的质量,从而有利于提高减振效果。
52.在一具体的实施例中,外圈802与导向架40固定连接,内圈801与车体固定连接。本文对外圈802与导向架40的固定连接方式不做具体的限制,对内圈801与车体的固定连接方式也不做具体的限制。
53.如图6所示,转向架还包括支座,支座的一端与内圈801连接,另一端与车体连接。
54.在其他实施例中,还可以是内圈801与导向架40固定连接,外圈802与车体连接。此时,支座的一端与外圈802连接,支座的另一端与车体连接。
55.在一实施例中,如图8及图9所示,转向架还包括弹性件803,内圈801和外圈802中
的其中一个与弹性件803的一端连接,另一个与弹性件803的另一端连接,以使弹性件803在导向架40转动时能够发生形变。导向架40发生转动时,内圈801和外圈802发生相对转动,弹性件803的两端分别与内圈801和外圈802连接,从而使得弹性件803能够在内圈801和外圈802发生转动时产生形变,以积攒势能,继而能够在导向架40转动完成后能够产生一个回转力矩,当不需要转向时,回正力矩能够保证轨道车辆继续直线行驶,从而不需要导向轮20的导向,以能够降低导向轮20使用率,提高导向轮20的使用寿命。
56.现有的转向结构,在导向架40发生偏转后没有自动回正功能,需要轨道施加力使其转动,从而使导向轮20受到垂向作用力,加快了导向轮20的磨损。本发明的转向架,在导向架40发生偏转后能够在发生形变后的弹性件803的作用下自动回正以使轨道车辆继续沿直线行驶,从而不需要轨道施加作用力给导向轮20,降低了导向轮20的使用率,减小了导向轮20的磨损,提高了导向轮20的使用寿命。
57.在一具体实施例中,外圈802与导向架40固定连接,导向架40上设置有安装口8021,弹性件803的一端固定在内圈801上,弹性件803的另一端插接在安装口8021内。此时,弹性件803的另一端与外圈802间接连接。
58.在其他实施例中,安装口8021还可以设置在外圈802上,此时,弹性件803的另一端与外圈802直接连接。还可以是,弹性件803的一端固定在外圈802或导向架40上,弹性件803的另一端与内圈801连接,只要能够保证弹性件803能够在导向架40转动时发生形变即可。
59.在一实施例中,安装口8021沿外圈802的径向延伸,弹性件803也沿外圈802的径向延伸。
60.在一实施例中,如图8及图9所示,转向架还包括弹性件安装座804,弹性件803设置在弹性件安装座804上,弹性件安装座804设置在所述内圈801上,弹性件803背离弹性件安装座804的一端延伸至与外圈802或导向架40连接。
61.如图9所示,安装口8021的侧壁上设有耐磨片805,耐磨片805用于与弹性件803接触,以期降低弹性件803的磨损。
62.可以理解的是,弹性件803可以是阻尼片,也可以是弹簧等其他部件。安装口8021可以是形成在导向架40上的凹槽,也可以是沿竖直方向贯穿导向架40的开口。本发明对安装口8021的具体形状不做具体的限制。
63.在一些实施例中,导向架40可以是如图1至图7所示的导向框,也可以是如图8及图9所示的由多个悬臂组成的导向装置。本发明对导向架40的形状不做具体的限制。
64.如图10所示,本发明实施例提供的转向架还包括动力总成90,动力总成90与车体连接。具体地,如图11所示,动力总成90包括电机901、变速箱902、差速器903及传动机构904,变速箱902的输入轴与电机901的输出轴连接,变速箱902的输出端与差速器903的主减齿轮连接,差速器903的输出端分别与传动机构904连接,传动机构904与轮毂总成101通过万向节连接。
65.在如图10所示的实施例中,动力总成90的部分结构位于支座上且与支座连接,该支座与内圈801连接,当动力总成90与车体连接时,内圈801实现了与车体的间接连接。
66.该实施例中的变速箱902与车体连接,也即是变速箱902位于支座上且与支座连接,从而避免了将动力总成90固定在导向架40上,减轻了导向架40的重量。该悬挂60及减振器70下方的质量减小,从而有利于提高减振功能,有利于提高车辆运行平稳性和舒适性。具
体地,变速器可以通过悬置、螺栓等方式实现与车体的连接。
67.在其他实施例中,还可以是动力总成90的其他部件与车体连接,具体哪一部件与车体连接,可以根据需要适当调整。
68.上述包括动力总成90在内的转向架为动力转向架。在其他实施例中,动力总成90还可以省略,形成非动力转向架,转向架上是否设置动力总成90,可以根据实际情况具体设置。
69.本发明另一实施例还提供一种轨道车辆,包括上述的转向架。以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
70.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1