一种基于激光的轨距测量装置的制作方法
[0001]
本实用新型是涉及轨道检测设备技术领域,具体的说是一种基于激光的轨距测量装置。
背景技术:
[0002]
随着我国轨道交通的发展,道路建设中轨道建设越来越重要,包括地铁、高铁、火车和轻轨等都会出现轨道。随着轨道建设的高速发展,整个铁路行业对铁轨要求越来越高,为保证铁路运输中人员或货物的安全性与稳定性,这就不可避免对轨道进行常态化巡检,因此轨距测量是一个重大且艰巨的任务,而传统的基于视觉的检测方法不仅精度较差,且时间较慢、检测效率低下。
[0003]
结合目前的方法,轨距测量主要存在以下问题:传统小车以推为主,自身不携带动力系统,此作业方式效率不高,作业不稳定,人为干扰因素大;传统方法精度差,效率低下。因此,设计出一款稳定、便捷、精度高、效率高的轨距测量装置至关重要,同时,对我国轨道交通行业的促进和发展,对提高轨道交通行业的检测与运维技术水平都有不可估量的作用和深远意义。
技术实现要素:
[0004]
本实用新型要解决的技术问题是提供一种基于激光的轨距测量装置,该种轨距测量装置在测量过程中能够在一定范围内自适应不同宽度的轮轨,同时能够在测量装置与轮轨间距不断变化的过程中自适应的调整二维线激光测距仪的高度,保证检测过程的持续有效。
[0005]
为解决上述技术问题,本实用新型采用的技术方案为:
[0006]
一种基于激光的轨距测量装置,其特征在于:包括水平设置的固定横梁,所述的固定横梁两端下方设置有第一行走轮和第二行走轮,所述的第一行走轮和第二行走轮对称设置,所述的第一行走轮和第二行走轮均为锥形轮,所述的第一行走轮的锥形面与左侧轮轨外侧面顶部边缘接触,所述的第二行走轮的锥形面与右侧轮轨外侧面顶部边缘接触,所述的第一行走轮的锥形面和第二行走轮的锥形面相对设置;所述的第一行走轮和第二行走轮均与驱动装置传动连接,所述的驱动装置用于带动第一行走轮和第二行走轮转动;
[0007]
所述的左侧轮轨远离第一行走轮一侧水平间距设置有第一二维线激光测距仪,所述的第一二维线激光测距仪用于发射激光照射左侧轮轨内侧壁测量第一二维线激光测距仪距离左侧轮轨内侧壁的距离;所述的右侧轮轨远离第二行走轮一侧水平间距设置有第二二维线激光测距仪,所述的第二二维线激光测距仪用于发射激光照射右侧轮轨内侧壁测量第二二维线激光测距仪距离右侧轮轨内侧壁的距离;所述的第一二维线激光测距仪和第二二维线激光测距仪均与固定横梁固定连接。
[0008]
所述的驱动装置包括第一直流电机和第二直流电机,所述的第一直流电机的输出轴与第一减速齿轮组的输入轴传动连接,所述的第一减速齿轮组的输出轴与第一行走轮的
中心轴传动连接;所述的第二直流电机的输出轴与第二减速齿轮组的输入轴传动连接,所述的第二减速齿轮组的输出轴与第二行走轮的中心轴传动连接。
[0009]
所述的第一直流电机的控制器与第一编码器信号连接,所述的第一编码器用于采集运行时第一直流电机的转速和第一减速齿轮组的减速比;所述的第二直流电机的控制器与第二编码器信号连接,所述的第二编码器用于采集运行时第二直流电机的转速和第二减速齿轮组的减速比。
[0010]
所述的驱动装置还包括工控机、锂电池组和电机驱动器,所述的工控机与电机驱动器信号连接,所述的电机驱动器与第一直流电机控制器和第二直流电机控制器信号连接,所述的工控机通过电机驱动器控制第一直流电机和第二直流电机的转速;所述的工控机还与第一减速齿轮组控制器和第二减速齿轮组控制器信号连接,所述的工控机用于控制第一减速齿轮组和第二减速齿轮组的减速比;所述的锂电池组用于为工控机、电机驱动器、第一直流电机、第二直流电机的工作提供电量。
[0011]
所述的固定横梁的顶部设置有转接盘,所述的转接盘用于与外部装置固定连接。
[0012]
所述的第一行走轮的中心轴可转动的固定安装在第一支撑架的底端,所述的第一支撑架的顶端与固定横梁一端固定连接,所述的第二行走轮的中心轴可转动的固定安装在第二支撑架的底端,所述的第二支撑架的顶端与固定横梁另一端固定连接。
[0013]
所述的第一二维线激光测距仪与第一高度调整装置固定连接,所述的第二二维线激光测距仪与第二高度调整装置固定连接,所述的第一高度调整装置用于在固定横梁相对于左侧轮轨在竖直方向运动时维持第一二维线激光测距仪与左侧轮轨在竖直方向相对静止,所述的第二高度调整装置用于在固定横梁相对于右侧轮轨在竖直方向运动时维持第二二维线激光测距仪于右侧轮轨在竖直方向相对静止。
[0014]
所述的第一高度调整装置和第二高度调整装置结构相同均包括第一滑杆和第二滑杆,所述的第一滑杆和第二滑杆均竖直设置且可沿竖直方向往复滑动,所述的第一滑杆可滑动的安装在支撑架内,所述的第二滑杆可滑动的安装在固定支架内,所述的固定支架的顶端与固定横梁固定连接,所述的第一滑杆和第二滑杆的顶端通过水平设置的连接横杆固定连接,所述的第一滑杆的底端固定安装有可转动的轨道表面轮,所述的轨道表面轮与轮轨顶端平面滚动接触,所述的第二滑杆的底端固定安装二维线激光测距仪。
[0015]
所述的第一滑杆的顶端通过第一连接弹簧与支撑架内壁连接,所述的第二滑杆的顶端通过第二连接弹簧与固定支架内壁连接,所述的第一连接弹簧和第二连接弹簧均处于压缩状态。
[0016]
该种基于激光的轨距测量装置能够产生的有益效果为:第一,第一二维线激光测距仪测量出第一二维线激光测距仪距离左侧轮轨的距离l1,第二二维线激光测距仪测量出第二二维线激光测距仪距离右侧轮轨的距离l2,在两组二维线激光测距仪之间的距离不变的情况下,根据以上三组间距的和能够得到任意位置的轮距数据。第二,第一行走轮和第二行走轮未相对设置的锥形轮,当轮距减小时会降低固定横梁高度,适应较小的轮距,当轮距增大时,会增高固定横梁高度,适应较大的轮距。第三,轨道表面轮与二维线激光测距仪之间的相对高度不变,在轨道表面轮于轮轨表面接触的情况下,二维线激光测距仪与轮轨侧面在竖直方向相对静止,防止出现二维线激光测距仪照射方向脱离轮轨侧面的情况。第四,该种轨距测量装置能够自驱动行驶,可以控制行进的速度和方向,且两轮独立控制进行驱
动,在转弯时能够调整相对转速,完成转弯时轨距的测量。
附图说明
[0017]
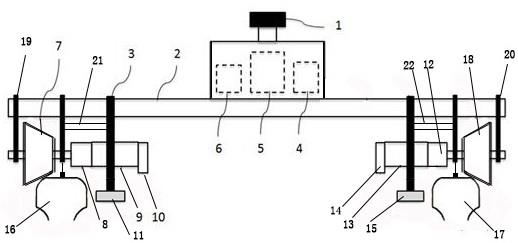
图1为本实用新型一种基于激光的轨距测量装置的结构示意图。
[0018]
图2为本实用新型一种基于激光的轨距测量装置中高度调整装置的结构示意图。
[0019]
图3为本实用新型一种基于激光的轨距测量装置中第一连接弹簧和第二连接弹簧的位置示意图。
[0020]
附图说明:1、转接盘;2、固定横梁;3、固定支架;4、工控机;5、锂电池组;6、电机驱动器;7、第一行走轮;8、第一减速齿轮组;9、第一直流电机;10、第一编码器;11、第一二维线激光测距仪;12、第二减速齿轮组;13、第二直流电机;14、第二编码器;15、第二二维线激光测距仪;16、左侧轮轨;17、右侧轮轨;18、第二行走轮;19、第一支撑架;20、第二支撑架;21;第一高度调整装置;22、第二高度调整装置;23、第一滑杆;24、第二滑杆;25、轨道表面轮;26、连接横杆;27、第一连接弹簧;28、第二连接弹簧。
具体实施方式
[0021]
以下结合说明书附图和具体优选的实施例对本实用新型作进一步描述。
[0022]
如图1所示,一种基于激光的轨距测量装置,其特征在于:包括水平设置的固定横梁2,所述的固定横梁2两端下方设置有第一行走轮7和第二行走轮18,所述的第一行走轮7和第二行走轮18对称设置,所述的第一行走轮7和第二行走轮18均为锥形轮,所述的第一行走轮7的锥形面与左侧轮轨16外侧面顶部边缘接触,所述的第二行走轮18的锥形面与右侧轮轨17外侧面顶部边缘接触,所述的第一行走轮7的锥形面和第二行走轮18的锥形面相对设置;所述的第一行走轮7和第二行走轮18均与驱动装置传动连接,所述的驱动装置用于带动第一行走轮7和第二行走轮18转动;
[0023]
所述的左侧轮轨16远离第一行走轮7一侧水平间距设置有第一二维线激光测距仪11,所述的第一二维线激光测距仪11用于发射激光照射左侧轮轨16内侧壁测量第一二维线激光测距仪11距离左侧轮轨16内侧壁的距离;所述的右侧轮轨17远离第二行走轮18一侧水平间距设置有第二二维线激光测距仪15,所述的第二二维线激光测距仪15用于发射激光照射右侧轮轨17内侧壁测量第二二维线激光测距仪15距离右侧轮轨17内侧壁的距离;所述的第一二维线激光测距仪11和第二二维线激光测距仪15均与固定横梁2固定连接。
[0024]
进一步的,第一二维线激光测距仪11测量出第一二维线激光测距仪11距离左侧轮轨16内侧壁的距离l1,第二二维线激光测距仪15测量出第二二维线激光测距仪15距离右侧轮轨17内侧壁的距离l2,在两组二维线激光测距仪之间的距离不变的情况下,根据以上三组间距的和能够得到任意位置的轮距数据。第一行走轮7和二行走轮18的锥形面相对设置,在轮距减小时,第一行走轮7和二行走轮18相对于轮轨表面竖直向下运动,在轮距增大时,第一行走轮7和二行走轮18相对于轮轨表面竖直向上运动。因此,该种锥形轮设置能够适应不断变化的轮距环境。
[0025]
本实施例中,驱动装置包括第一直流电机9和第二直流电机13,所述的第一直流电机9的输出轴与第一减速齿轮组8的输入轴传动连接,所述的第一减速齿轮组8的输出轴与第一行走轮7的中心轴传动连接;所述的第二直流电机13的输出轴与第二减速齿轮组12的
输入轴传动连接,所述的第二减速齿轮组12的输出轴与第二行走轮18的中心轴传动连接。
[0026]
本实施例中,第一直流电机9的控制器与第一编码器10信号连接,所述的第一编码器10用于采集运行时第一直流电机9的转速和第一减速齿轮组8的减速比;所述的第二直流电机13的控制器与第二编码器14信号连接,所述的第二编码器14用于采集运行时第二直流电机13的转速和第二减速齿轮组12的减速比。
[0027]
本实施例中,驱动装置还包括工控机4、锂电池组5和电机驱动器6,所述的工控机4与电机驱动器6信号连接,所述的电机驱动器6与第一直流电机9控制器和第二直流电机13控制器信号连接,所述的工控机4通过电机驱动器6控制第一直流电机9和第二直流电机13的转速;所述的工控机4还与第一减速齿轮组8控制器和第二减速齿轮组12控制器信号连接,所述的工控机4用于控制第一减速齿轮组8和第二减速齿轮组12的减速比;所述的锂电池组5用于为工控机4、电机驱动器6、第一直流电机9、第二直流电机13的工作提供电量。
[0028]
进一步的,工控机4能够通过电机驱动器6分别控制第一直流电机9和第二直流电机13的转向和转速,进一步的,工控机4还能够控制第一减速齿轮组8和第二减速齿轮组12的减速比,进而控制第一行走轮7和第二行走轮18的转速。一般情况下第一直流电机9和第二直流电机13均可采用功率为900w的直流电机,锂电池组5采用48v的大容量锂电池,能够满足检测装置稳定持续运行8小时。两轮独立控制进行驱动,在转弯时能够调整相对转速,完成转弯时轨距的测量
[0029]
本实施例中,固定横梁2的顶部设置有转接盘1,所述的转接盘1用于与外部装置固定连接。
[0030]
本实施例中,第一行走轮7的中心轴可转动的固定安装在第一支撑架19的底端,所述的第一支撑架19的顶端与固定横梁2一端固定连接,所述的第二行走轮18的中心轴可转动的固定安装在第二支撑架20的底端,所述的第二支撑架20的顶端与固定横梁2另一端固定连接。第一行走轮7、第二行走轮18以及两组电机均通过支撑架与固定横梁2固定连接,提高了结构的稳定性。
[0031]
本实施例中,第一二维线激光测距仪11与第一高度调整装置21固定连接,所述的第二二维线激光测距仪15与第二高度调整装置22固定连接,所述的第一高度调整装置21用于在固定横梁2相对于左侧轮轨16在竖直方向运动时维持第一二维线激光测距仪11与左侧轮轨16在竖直方向相对静止,所述的第二高度调整装置22用于在固定横梁2相对于右侧轮轨17在竖直方向运动时维持第二二维线激光测距仪15于右侧轮轨17在竖直方向相对静止。
[0032]
本实施例中,第一高度调整装置21和第二高度调整装置22结构相同均包括第一滑杆23和第二滑杆24,所述的第一滑杆23和第二滑杆24均竖直设置且可沿竖直方向往复滑动,所述的第一滑杆23可滑动的安装在支撑架内,所述的第二滑杆24可滑动的安装在固定支架3内,所述的固定支架3的顶端与固定横梁2固定连接,所述的第一滑杆23和第二滑杆24的顶端通过水平设置的连接横杆26固定连接,所述的第一滑杆23的底端固定安装有可转动的轨道表面轮25,所述的轨道表面轮25与轮轨顶端平面滚动接触,所述的第二滑杆24的底端固定安装二维线激光测距仪。
[0033]
进一步的,由于第一滑杆23、第二滑杆24、连接横杆26一体化固定连接,保证了轨道表面轮25与二维线激光测距仪之间的相对距离不变,且第一行走轮7和第二行走轮18均为锥面轮的设计在能够适应不同轮距的同时,也具有不与轮轨表面接触的特点,因此,通过
轨道表面轮25与轮轨表面紧密接触,保证了二维线激光测距仪与轮轨之间在竖直方向相对静止,消除了第一行走轮7和第二行走轮18在适应不同轨距工况时造成的高度变化对二维线激光测距仪的测距的影响。
[0034]
本实施例中,第一滑杆23的顶端通过第一连接弹簧27与支撑架内壁连接,所述的第二滑杆24的顶端通过第二连接弹簧28与固定支架3内壁连接,所述的第一连接弹簧27和第二连接弹簧28均处于压缩状态,如图3所示。
[0035]
进一步的,第一连接弹簧27和第二连接弹簧28均处于压缩状态减少了二维线激光测距仪以及轨道表面轮25在高度快速变化过程中的跳动。
[0036]
以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1