一种煤矿非均速压力调控猴车运行系统的制作方法
[0001]
本实用新型涉矿山运输与提升技术领域,具体为一种煤矿非均速压力调控猴车运行系统。
背景技术:
[0002]
目前,煤矿上运行的猴车系统主要有固定式猴车与自挂式猴车两种乘坐方式。前者是预先在钢丝绳索上等间距固定猴车,乘坐人员不需要自己钩挂猴车即可直接乘坐猴车;后者是运行的钢丝绳索上无固定的猴车,乘坐人员需要自己钩挂猴车才能乘坐猴车。无论是哪一种猴车乘坐方式,都有其应用优势,固定式猴车因其不需要人为钩挂猴车,乘车时较为方便和安全,而对于自挂式猴车虽然需要人为钩挂猴车,但其不需要全程固定大量的猴车,因而可以节省大量的猴车数量和运行成本,因此这两种猴车乘坐方式在煤矿上的应用十分普遍。然而,这两种猴车乘坐方式存在一个共同不可忽视的猴车乘坐安全问题,由于猴车的运行速度是固定的,在站点乘坐猴车或者到站时猴车运行速度保持不变,乘坐人员上下猴车时存在安全隐患,容易出现乘坐人员坠车和猴车脱绳事故。除此之外,固定式猴车乘坐方式需要固定大量的猴车,远长距离运行的猴车系统运行的经济成本较高,同时也需要消耗大量的能源;而对于自挂式猴车乘坐方式,因需自行钩挂猴车,乘坐时不仅不方便,而且还加大了乘坐猴车的安全隐患,钩挂猴车时容易出现坠车和猴车脱绳事故,尤其在随身携带有其他物品时自挂猴车的安全隐患更突出。
[0003]
实用新型专利201720648283.x公开的一种感应重量的猴车座椅,包括上端通过抱索器安装于钢丝绳的座椅柄;安装于座椅柄处的座垫;以及安装于座垫处的用于检测乘坐重量的重量传感器,重量传感器用于将检测到的信号发送至猴车控制器。该实用新型可以自动检测猴车上是否坐有矿工,为猴车的智能运行提供了保障。但是,该技术依然无法解决在猴车到达站点后人员上下车的存在安全隐患的问题。
技术实现要素:
[0004]
本实用新型所要解决的技术问题在于猴车运行系统速度无法阶段性控制,猴车到达站点后人员上下车存在安全隐患。
[0005]
本实用新型通过以下技术手段实现解决上述技术问题的:
[0006]
一种煤矿非均速压力调控猴车运行系统,包括匀速轨道、第一过渡轨道、第二过渡轨道、控制机构;
[0007]
所述匀速轨道两端的站点处,分别衔接有所述第一过渡轨道、第二过渡轨道,且匀速轨道的两端分别与第一过渡轨道、第二过渡轨道的对应端部重叠;
[0008]
所述第一过渡轨道、第二过渡轨道高于匀速轨道,且第一过渡轨道、第二过渡轨道与匀速轨道平行间隔设置;所述第一过渡轨道、第二过渡轨道与匀速轨道的横向排布宽度小于猴车抱索器的宽度;
[0009]
所述控制机构包括控制器、第一驱动机构、第二驱动机构、第三驱动机构、第一压
力传感器、第二压力传感器、第三压力传感器;所述第一压力传感器、第二压力传感器分别探测第一过渡轨道、第二过渡轨道的压力、第三压力传感器探测匀速轨道的压力,并分别与控制器通信连接,所述控制器根据压力信息分别控制第一驱动机构、第二驱动机构、第三驱动机构启闭,所述第一驱动机构、第二驱动机构分别驱动第一过渡轨道、第二过渡轨道运行,所述第三驱动机构驱动匀速轨道运行。
[0010]
通过第一过渡轨道和第二过渡轨道高于匀速轨道,实现猴车在站点时,抱索器挂在过渡轨道上时不会对匀速轨道造成压力,且便于顺利过渡到匀速轨道上,从而实现不同压力传感器采集到不同阶段的压力信息,为有效的控制猴车站点的轨道运行速度提供基础。
[0011]
进一步的,所述第一驱动机构包括第一驱动轮和第一从动轮,第一过渡轨道套设在第一驱动轮和第一从动轮上,在所述第一驱动轮和第一从动轮之间设置有第一托辊,所述第一托辊位于第一驱动轮和第一从动轮之间将第一过渡轨道托高;所述第一压力传感器固定在第一托辊的转轴处;
[0012]
所述第二驱动机构包括第二驱动轮和第二从动轮,第二过渡轨道套设在第二驱动轮和第二从动轮上,在所述第二驱动轮和第二从动轮之间设置有第二托辊,所述第二托辊将位于第二驱动轮和第二从动轮之间将第二过渡轨道托高;所述第二压力传感器固定在第二托辊的转轴处。
[0013]
进一步的,所述第一托辊为两个,分别位于第一驱动轮、第一从动轮之间;所述第二托辊为两个,分别位于第二驱动轮、第二从动轮之间。
[0014]
进一步的,第一过渡轨道的下车端和第二过渡轨道的上车端的转轴上还固定有用于承托匀速轨道的第三托辊;所述第三托辊与同转轴上的驱动轮或从动轮最高点等高;所述第三压力传感器固定在第三托辊的转轴处。
[0015]
进一步的,运行系统包括镜像设置的左运行单元和右运行单元;所述运行单元和右运行单元均包括所述匀速轨道、第一过渡轨道、第二过渡轨道、控制机构。
[0016]
进一步的,所述左运行单元和右运行单元对应的第一驱动轮、第一从动轮、第二驱动轮、第二从动轮、第一托辊、第二托辊分别通过轴承同轴固定在对应转轴上。
[0017]
进一步的,所述转轴通过竖杆与横梁固定。
[0018]
本实用新型的优点在于:
[0019]
本实用新型通过第一过渡轨道和第二过渡轨道高于匀速轨道,实现猴车在站点时,抱索器挂在过渡轨道上时不会对匀速轨道造成压力,且便于顺利过渡到匀速轨道上,从而实现不同压力传感器采集到不同阶段的压力信息,为有效的控制猴车站点的轨道运行速度提供基础。
[0020]
该系统不仅有效解决了猴车到站上下车时存在的安全隐患,同时也可以解决固定式猴车运行成本高的问题,为煤矿的猴车系统安全运行提供了技术保障。
[0021]
通过两个第一托辊可以将第一过渡轨道尽量的全程抬高,避免匀速轨道在过渡轨道段受到压力,减少控制误差。
[0022]
将第三托辊与第一过渡轨道的下车端、第二过渡轨道的上车端的驱动轮或从动轮同轴固定,可以即使采集到猴车落入匀速轨道上的压力,提高控制精度,实现猴车运行无缝衔接。
附图说明
[0023]
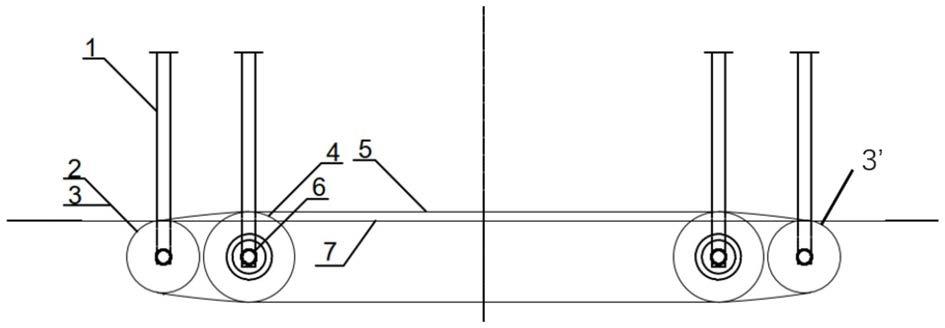
图1为本实用新型实施例中运行系统第一过度轨道和匀速轨道的衔接结构示意图;
[0024]
图2为本实用新型实施例中运行系统第一驱动机构与第三托辊之间的装配关系示意图;
[0025]
图3为本实用新型实施例中运行系统第一托辊的结构示意图;
[0026]
图4为本实用新型实施例中运行方法的流程框图。
[0027]
1、竖杆;2、第三托辊;3、第一驱动轮;3’、第一从动轮;4、第一托辊;5、第一过渡轨道;6、轴承7、匀速轨道;8、电机;9、第一压力传感器;10、转轴。
具体实施方式
[0028]
为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0029]
如图1所示,本实施例公开一种煤矿非均速压力调控猴车运行系统,包括匀速轨道7、第一过渡轨道5、第二过渡轨道、控制机构;匀速轨道7、第一过渡轨道5、第二过渡轨道均为钢丝绳索。
[0030]
匀速轨道7两端的站点处,分别衔接有第一过渡轨道5、第二过渡轨道;且匀速轨道7的两端分别与第一过渡轨道5、第二过渡轨道的对应端部重叠,便于猴车顺利过渡。需要说明的是,由于第二过渡轨道与第一过渡轨道5 结构相同,图1中仅展示第一过渡轨道5与匀速轨道7的衔接结构,以下描述也是以第一过渡轨道5展开。
[0031]
本实施例中,两个过渡轨道高于匀速轨道7,且第一过渡轨道5、第二过渡轨道与匀速轨道7平行间隔设置;第一过渡轨道5、第二过渡轨道与匀速轨道7的横向排布宽度小于猴车抱索器的宽度;猴车处于站点时,猴车抱索器同时扣在过渡轨道和匀速轨道7上,由于过渡轨道和匀速轨道7高度不同,所以承受的压力不同,为控制机构提供对应的控制信号。
[0032]
如图2、图3所示,控制机构包括控制器、第一驱动机构、第二驱动机构、第三驱动机构、第一压力传感器9、第二压力传感器(图中未示出)、第三压力传感器(图中未示出);第一压力传感器9、第二压力传感器分别探测第一过渡轨道5、第二过渡轨道的压力、第三压力传感器探测匀速轨道 7的压力,并分别与控制器通信连接,控制器根据压力信息分别控制第一驱动机构、第二驱动机构、第三驱动机构启闭,第一驱动机构、第二驱动机构分别驱动第一过渡轨道5、第二过渡轨道运行,第三驱动机构驱动匀速轨道7运行。
[0033]
具体的,第一驱动机构包括第一驱动轮3和第一从动轮3’,第一过渡轨道5套设在第一驱动轮3和第一从动轮3’上,在第一驱动轮3和第一从动轮3’之间设置有第一托辊4,第一托辊4将位于第一驱动轮3和第一从动轮3’之间将第一过渡轨道5托高;第一压力传感器9固定在第一托辊4 的转轴10处;
[0034]
第二驱动机构与第一驱动机构结构相同,包括第二驱动轮(图中未示出)和第二从动轮(图中未示出),第二过渡轨道套设在第二驱动轮和第二从动轮上,在第二驱动轮和第
二从动轮之间设置有第二托辊(图中未示出),第二托辊将位于第二驱动轮和第二从动轮之间将第二过渡轨道托高;第二压力传感器固定在第二托辊的转轴10处。
[0035]
第一过渡轨道5的下车端和第二过渡轨道的上车端的转轴10上还固定有用于承托匀速轨道7的第三托辊2;第三托辊2与同转轴10上的驱动轮或从动轮最高点等高;所述第三压力传感器固定在第三托辊2的转轴10处。
[0036]
本实施例中,第一托辊4为两个,分别位于第一驱动轮3、第一从动轮 3’之间,且尽量的靠近第一驱动轮3、第一从动轮3’;第二托辊为两个,分别位于第二驱动轮、第二从动轮之间,且尽量的靠近第二驱动轮、第二从动轮,便于将过渡轨道的端部顶高。
[0037]
本实施例中,运行系统可以是单向的,也可以通过左右两个运行单元实现双向运行,双向运行具体结构为:
[0038]
如图2所示,运行系统包括镜像设置的左运行单元和右运行单元;左运行单元和右运行单元均包括匀速轨道7、第一过渡轨道5、第二过渡轨道、控制机构。
[0039]
左运行单元和右运行单元对应的第一驱动轮3、第一从动轮3’(图中未示出)、第二驱动轮(图中未示出)、第二从动轮(图中未示出)、第一托辊4、第二托辊(图中未示出)分别通过轴承6同轴固定在对应转轴10 上。转轴10通过竖杆1与横梁固定。
[0040]
本实施例中,第一驱动轮3、第二驱动轮、匀速轨道7的驱动轮均通过对应的电机8驱动。
[0041]
工作原理:
[0042]
通过第一过渡轨道5和第二过渡轨道高于匀速轨道7,实现猴车在站点时,抱索器挂在过渡轨道上时不会对匀速轨道7造成压力,且便于顺利过渡到匀速轨道7上,从而实现不同压力传感器采集到不同阶段的压力信息,为有效的控制猴车站点的轨道运行速度提供基础。当猴车在进站点时,挂在第一过渡轨道5上时(匀速轨道7也在抱索器的抱索范围内,只是不承受压力),第一压力传感器9采集到猴车重量,控制器根据该重量控制第一驱动机构以较慢的速度运行,便于人员上车;待人员上车后,第一传感器采集到人员重量,控制器控制第一驱动机构以较快的速度运行,当运行到第一过渡轨道5与匀速轨道7交接处,猴车落到匀速轨道7上时,第三传感器采集到人员重量,控制器控制第三驱动机构以设定速度匀速运行。当猴车运行到出站点时,猴车在惯性作用下进入第二过渡轨道,此时由于匀速轨道7低于第二过渡轨道,所以,第三压力传感器压力消失,控制器控制第三驱动机构停止运行,同时第二压力传感器采集到人员重量信息,控制第二驱动机构以比匀速慢的速度运行,便于人员下车,待人员下车后,第二压力传感器采集到猴车重量信息,此时,控制器控制第二驱动机构以较慢的速度运行,直至猴车回收,第二压力传感器压力信息消失,控制器控制第二驱动机构停止运行,至此,完整的运行结束。
[0043]
如图4所示,本实施例中一种煤矿非均速压力调控猴车运行系统的运行方法包括以下步骤:
[0044]
s01.初始状态下,匀速轨道7、第一过渡轨道5、第二过渡轨道、控制机构处于静止状态;
[0045]
s02.当需要运行猴车时,将猴车抱索器挂在站点第一过渡轨道5上,第一托辊4转轴10处的第一压力传感器9感受到猴车的压力信息,并将压力信息发送给控制器,控制器控制瞬间启动第一电机8,第一电机8驱动第一驱动轮3以0.25m/s的速度带动第一过渡轨道5
运行;
[0046]
s03.当有人要乘坐在猴车上时,第一压力传感器9感获得人体重的压力信息,并将压力信息发送给控制器,控制器控制第一电机8驱动第一驱动轮3以0.4m/s的速度带动第一过渡轨道5运行;
[0047]
s04.当猴车经过匀速轨道7与过渡轨道衔接处,猴车落到匀速轨道7 上时,第三压力传感器获得压力信号,并将压力信号发送给控制器,控制器控制第三驱动机构以匀速运行;同时,第一压力传感器9的压力信息消失,控制器控制第一驱动机构停止运行;
[0048]
s05.当猴车到达出站点,经过匀速轨道7与第二过渡轨道的衔接处时,猴车在惯性作用下进入第二过渡轨道,第二压力传感器获得压力信息,并将压力信息发送给控制器,控制器控制第二驱动机构启动,猴车减速至0.4 m/s,同时第三压力传感器压力信息小时,控制第三驱动机构停止运行;
[0049]
s06.当人员从猴车下车后,出站点的过渡轨道中的第二压力传感器探测到压力减轻,并将压力信息发送给控制器,控制器控制第二驱动机构减速至0.25m/s;
[0050]
s07.猴车离站或者回收后,第二压力传感器压力信息消失,控制器控制第二驱动机构停止运行。
[0051]
根据上述的方法,可以有效的控制猴车站点的绳索运行速度,且同时不影响全程运行的钢丝绳索正常工作,通过压力调节系统实现了猴车经过站点时行车速度的自动调节。其中,第三托辊与第一驱动轮或第二驱动力共同固定在同一转轴上,两托轮之间间距为2mm。当压力传感器9感受到的压力小于2kg时,电动机8停止工作;当压力传感器9感受到2-35kg 的重力时,电动机8的转动速度为0.25m/s;当压力传感器9感受到大于35kg的重力时,电动机8的转动速度为0.4m/s。
[0052]
以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1