一种地铁隧道内的列车定位方法、装置、设备及存储介质与流程
本发明涉及定位,尤其涉及一种地铁隧道内的列车定位方法、装置、设备及存储介质。
背景技术:
1、随着城市轨道交通的快速发展,地铁限界入侵事件多有发生,给地铁安全运行带来了极大挑战,列车驾驶以提高车辆安全性、高效性为目标,而列车的安全性和高效性需要以高精度定位为支撑。路上空旷场景比较成熟的定位设备是卫星导航和惯性导航,路上、城市楼宇及树木遮挡场景大多采用激光雷达、相机和组合惯导进行融合定位或建图定位,现有的地铁定位系统强依赖地铁线路原始测绘信息、应答器基础设施及其位置信息、信号系统等,而地铁线路的原始测绘信息涉及保密问题,一旦泄露会危及公共安全,为提高定位精度而增设应答器基础设施也会增加成本。
2、基于此,需要一种成本低、精度高、实用性强的地铁隧道内的列车定位方法。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种地铁隧道内的列车定位方法、装置、设备及存储介质。
2、基于上述目的,本发明提供了一种地铁隧道内的列车定位方法,包括:
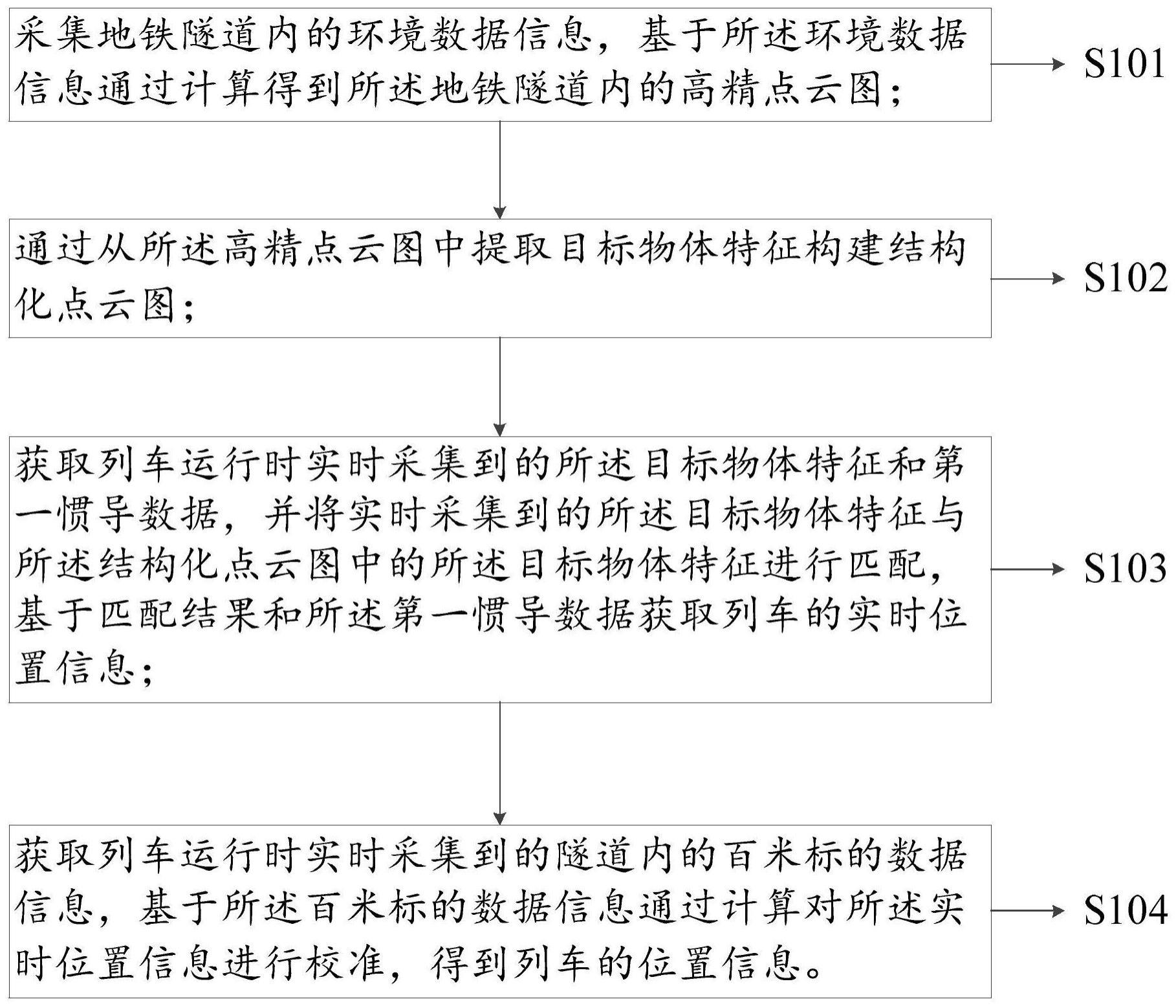
3、采集地铁隧道内的环境数据信息,基于所述环境数据信息通过计算得到所述地铁隧道内的高精点云图;
4、通过从所述高精点云图中提取目标物体特征构建结构化点云图;
5、获取列车运行时实时采集到的所述目标物体特征和第一惯导数据,并将实时采集到的所述目标物体特征与所述结构化点云图中的所述目标物体特征进行匹配,基于匹配结果和所述第一惯导数据获取列车的实时位置信息;
6、获取列车运行时实时采集到的隧道内的百米标的数据信息,基于所述百米标的数据信息通过计算对所述实时位置信息进行校准,得到列车的位置信息。
7、进一步地,采集地铁隧道内的环境数据信息,基于所述环境数据信息通过计算得到所述地铁隧道内的高精点云图,包括:
8、所述环境数据信息包括激光原始数据、第二惯导数据和卫星数据,基于所述惯导数据和所述卫星数据计算得到位姿数据,基于所述位姿数据和所述激光原始数据计算得到所述高精点云图。
9、进一步地,所述通过从所述高精点云图中提取目标物体特征构建结构化点云图,包括:
10、将所述高精点云图转换为二维图像;
11、通过第一预训练模型对所述二维图像中对应的所述目标物体特征进行分类;
12、将经过分类的所述目标物体特征投影至所述高精点云图中,得到所述结构化点云图。
13、进一步地,所述获取列车运行时实时采集到的所述目标物体特征和第一惯导数据,并将实时采集到的所述目标物体特征与所述结构化点云图中的所述目标物体特征进行匹配,基于匹配结果和所述第一惯导数据获取列车的实时位置信息,包括:
14、基于所述匹配结果确定列车的第一实时位置信息;
15、基于所述第一实时位置信息和所述第一惯导数据确定列车的第二实时位置信息;
16、所述第一实时位置信息和所述第二实时位置信息构成所述实时位置信息。
17、进一步地,所述百米标的数据信息包括属性信息和所述百米标相对于列车的位置信息,获取列车运行时实时采集到的隧道内的百米标的数据信息,包括:
18、获取列车运行时实时采集到的百米标的图像信息,通过第二预训练模型对所述图像信息进行识别,得到所述属性信息;
19、获取列车运行时实时采集到的点云信息,基于所述图像信息和所述点云信息得到所述百米标相对于列车的位置信息。
20、进一步地,所述基于所述图像信息和所述点云信息得到所述百米标相对于列车的位置信息,包括:
21、所述图像信息通过部署在列车上的摄像装置获取,所述点云信息通过部署在列车上的激光雷达获取,以所述摄像装置为原点构建第一坐标系,将所述图像信息在所述第一坐标系中的坐标记为第一坐标;
22、以所述激光雷达为原点构建第二坐标系,将所述百米标在所述第二坐标系中的坐标记为第二坐标;
23、将所述第二坐标系通过旋转和平移映射至所述第一坐标系中,将所述第二坐标对应的所述点云信息标记在所述第一坐标中,基于经过标记的所述第一坐标得到所述百米标相对于列车的位置信息。
24、进一步地,所述基于所述百米标的数据信息通过计算对所述实时位置信息进行校准,得到列车的位置信息,包括:
25、基于所述属性信息得到所述百米标与所述地铁隧道起始点的距离;
26、基于所述百米标与所述地铁隧道起始点的距离和所述百米标相对于列车的位置信息,通过计算得到所述位置信息。
27、基于同一发明构思,本发明还提供了一种地铁隧道内的列车定位装置,包括:
28、高精点云图构建模块,被配置成采集地铁隧道内的环境数据信息,基于所述环境数据信息通过计算得到所述地铁隧道内的高精点云图;
29、结构化点云图构建模块,通过从所述高精点云图中提取目标物体特征构建结构化点云图;
30、实时位置获取模块,被配置成获取列车运行时实时采集到的所述目标物体特征和第一惯导数据,并将实时采集到的所述目标物体特征与所述结构化点云图中的所述目标物体特征进行匹配,基于匹配结果和所述第一惯导数据获取列车的实时位置信息;
31、校准模块,被配置成获取列车运行时实时采集到的隧道内的百米标的数据信息,基于所述百米标的数据信息通过计算对所述实时位置信息进行校准,得到列车的位置信息。
32、基于同一发明构思,本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述所述的方法。
33、基于同一发明构思,本发明还提供了一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使计算机执行如上述所述的方法。
34、从上面所述可以看出,本发明提供的一种地铁隧道内的列车定位方法、装置、设备及存储介质,实现了在缺少卫星信号和纵向特征的长距离隧道的高精点云图的构建,实现了在不依赖原始测绘信息、应答器基础设施及其位置信息、信号系统的基础上的高精度厘米级的定位,为限界空间内的异物检测和地铁隧道场景内的列车自动驾驶提供了基础支撑。
技术特征:
1.一种地铁隧道内的列车定位方法,其特征在于,该方法包括:
2.根据权利要求1所述的一种地铁隧道内的列车定位方法,其特征在于,采集地铁隧道内的环境数据信息,基于所述环境数据信息通过计算得到所述地铁隧道内的高精点云图,包括:
3.根据权利要求1所述的一种地铁隧道内的列车定位方法,其特征在于,所述通过从所述高精点云图中提取目标物体特征构建结构化点云图,包括:
4.根据权利要求1所述的一种地铁隧道内的列车定位方法,其特征在于,所述获取列车运行时实时采集到的所述目标物体特征和第一惯导数据,并将实时采集到的所述目标物体特征与所述结构化点云图中的所述目标物体特征进行匹配,基于匹配结果和所述第一惯导数据获取列车的实时位置信息,包括:
5.根据权利要求1所述的一种地铁隧道内的列车定位方法,其特征在于,所述百米标的数据信息包括属性信息和所述百米标相对于列车的位置信息,获取列车运行时实时采集到的隧道内的百米标的数据信息,包括:
6.根据权利要求5所述的一种地铁隧道内的列车定位方法,其特征在于,所述基于所述图像信息和所述点云信息得到所述百米标相对于列车的位置信息,包括:
7.根据权利要求5所述的一种地铁隧道内的列车定位方法,其特征在于,所述基于所述百米标的数据信息通过计算对所述实时位置信息进行校准,得到列车的位置信息,包括:
8.一种地铁隧道内的列车定位装置,其特征在于,该装置包括:
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如权利要求1至7任意一项所述的方法。
10.一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使计算机执行权利要求1至7任意一项所述的方法。
技术总结
本发明公开一种地铁隧道内的列车定位方法、装置、设备及存储介质,该方法包括:采集地铁隧道内的环境数据信息,基于环境数据信息通过计算得到所述地铁隧道内的高精点云图;通过从高精点云图中提取目标物体特征构建结构化点云图;获取列车运行时实时采集到的目标物体特征和第一惯导数据,并将实时采集到的目标物体特征与结构化点云图中的目标物体特征进行匹配,基于匹配结果和第一惯导数据获取列车的实时位置信息;获取列车运行时实时采集到的隧道内的百米标的数据信息,基于百米标的数据信息通过计算对实时位置信息进行校准,得到列车的位置信息。本发明提供的技术方案是一种成本低、精度高、实用性强的列车定位方法。
技术研发人员:侯志超,潘文波,袁希文,黄文宇,李程,胡云卿
受保护的技术使用者:中车株洲电力机车研究所有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!