一种APM轨道线型检测小车的制作方法
本技术涉及apm轨道检测,具体的涉及一种apm轨道线型检测小车。
背景技术:
1、apm是一种全自动运行的自导向运输模式,车辆在导轨上运行,拥有独立路权。利用橡胶轮胎走行,有独立路权,设专用导向机构,并采用无人驾驶的运输系统。轨道线路设备是铁路运输业的基础设施,常年经受着风雨冻融和列车荷载的作用,钢轨、联结零件及轨枕不断磨损,使得轨道几何形状尺寸不断发生变化,路基及道床也不断产生变形,而使线路设备技术状态不断地发生变化。轨道走行面及导向轨的线型状态,将会影响了列车的安全运行以及乘坐舒适性。
2、针对走行面高度、导向轨轨向等线型等问题,目前主要采用人工测量的方式,明显存在人力劳动强度大、作业效率低,测量的精度无法保障等不足,因此需要自动化的检测设备。
技术实现思路
1、本实用新型的目的在于提供一种apm轨道线型检测小车,在导向装置一处导向轮上连接驱动电机,通过外部移动式遥控终端能够控制小车沿轨道线路行进。导向装置能够自适应导向轨,当遇到导向轨宽度变化或过弯曲轨道时,能够保证导向轮能够顺利沿导向轨滚动或过弯,保证了小车的线路通过性。
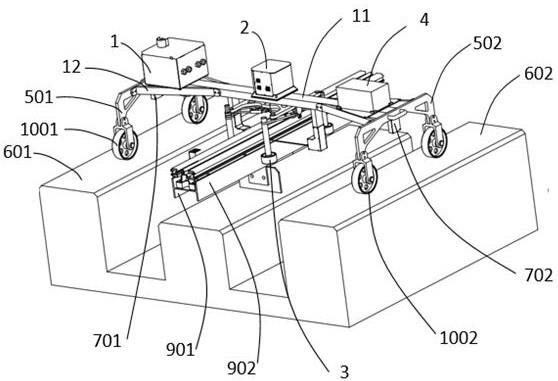
2、为了达到上述目的,本实用新型采用的技术方案是:一种apm轨道线型检测小车,其特征在于,包括:数据采集控制模块1,惯导单元2,导向装置3,电源模块4,左竖板501,右竖板502,左高度测量组件701,右高度测量组件702,左轨向测量组件801,右轨向测量组件802,左走行轮1001,右走行轮1002,横梁11,加强梁12,rfid13;所述导向装置3与横梁11的下表面连接;所述左走行轮1001位于左走行面601上,所述右走行轮1002位于右走行面602上;所述导向装置3架设在与左导向轨腹板901和右导向轨腹板902上方。
3、进一步地,所述惯导单元2安装在所述横梁11的中心上表面,所述数据采集控制模块1安装在横梁11左端的上表面,所述电源模块4安装在横梁11右端的上表面。
4、进一步地,所述左竖板501连接在横梁11的左端,所述右竖板502连接在横梁11的右端;所述左高度测量组件701安装在左竖板501的中部,所述右高度测量组件702安装在右竖板502的中部。
5、进一步地,所述左竖板501和右走行轮1002呈拱形;所述左竖板501的两个支脚上各安装有一个左走行轮1001,所述右竖板502的两个支脚上各安装有一个右走行轮1002。
6、进一步地,所述左轨向测量组件801安装在横梁11左部侧下表面,所述右轨向测量组件802安装在横梁11右部的下表面;所述rfid13安装在横梁11的下表面。
7、进一步地,所述横梁11与左竖板501、右竖板502连接的l型拐角处连接有加强梁12。
8、进一步地,所述导向装置3包括:基板301,旋转电机302,旋转编码器303,导向轮座304,导向轮305,外杆306,第一销307,第二销308,第三销309,内杆3010,滑轨3011,滑块3012,过渡板3013,螺母3014,螺纹杆3015,伸缩杆3016,支撑板3017;所述螺纹杆3015方向与导向轨垂直。
9、进一步地,所述导向轮305安装在导向轮座304的下端;所述导向轮座304的上端安装在外杆306的一端;所述导向轮座304有四个,其中一个的上端安装有旋转电机302,一个的上端安装有旋转编码器303;所述外杆306中部开有孔,通过第一销307连接在基板301角上;所述外杆306的另一端通过第二销308与内杆3010的一端连接;所述内杆3010的另一端通过第三销309连接在过渡板3013上;所述伸缩杆3016一端固定在外杆306中部,另一端固定在基板301的中部。
10、进一步地,所述基板301安装在横梁11中心的下表面;所述基板301下表面安装有滑轨3011,所述滑轨3011上安装有两个滑块3012,所述滑块3012安装有过渡板3013。
11、进一步地,所述螺纹杆3015穿过两个第三销309的环,所述螺纹杆3015的两端通过支撑板3017与基板301连接;所述支撑板3017与第三销309中间的螺纹杆3015上安装有螺母3014。
12、与现有技术对比,本实用新型具备以下有益效果:
13、(1)本方案线型检测系统通过惯导单元获取小车的相对运动轨迹,结合高度测量组件和轨向测量组件,获取的走行面相对于车体的高度、车体与导向轨横向距离,能够实现对走行面高度、导向轨轨向的测量;
14、(2)结合旋转编码器的里程计数以及rfid读取的轨道设施上射频标签的里程信息,能够辅助惯导单元实现对高度、轨向测量时定位精度的提高;
15、(3)解决了现有apm轨道高度、轨向等线型人工测量劳动强度大、效率低、测量精度低的问题。
技术特征:
1.一种apm轨道线型检测小车,其特征在于,包括:数据采集控制模块(1),惯导单元(2),导向装置(3),电源模块(4),左竖板(501),右竖板(502),左高度测量组件(701),右高度测量组件(702),左轨向测量组件(801),右轨向测量组件(802),左走行轮(1001),右走行轮(1002),横梁(11),加强梁(12),rfid(13);所述导向装置(3)与横梁(11)的下表面连接;所述左走行轮(1001)位于左走行面(601)上,所述右走行轮(1002)位于右走行面(602)上;所述导向装置(3)架设在与左导向轨腹板(901)和右导向轨腹板(902)上方。
2.根据权利要求1所述的一种apm轨道线型检测小车,其特征在于,所述惯导单元(2)安装在所述横梁(11)的中心上表面,所述数据采集控制模块(1)安装在横梁(11)左端的上表面,所述电源模块(4)安装在横梁(11)右端的上表面。
3.根据权利要求1所述的一种apm轨道线型检测小车,其特征在于,所述左竖板(501)连接在横梁(11)的左端,所述右竖板(502)连接在横梁(11)的右端;所述左高度测量组件(701)安装在左竖板(501)的中部,所述右高度测量组件(702)安装在右竖板(502)的中部。
4.根据权利要求1所述的一种apm轨道线型检测小车,其特征在于,所述左竖板(501)和右走行轮(1002)呈拱形;所述左竖板(501)的两个支脚上各安装有一个左走行轮(1001),所述右竖板(502)的两个支脚上各安装有一个右走行轮(1002)。
5.根据权利要求1所述的一种apm轨道线型检测小车,其特征在于,所述左轨向测量组件(801)安装在横梁(11)左部侧的下表面,所述右轨向测量组件(802)安装在横梁(11)右部的下表面;所述rfid(13)安装在横梁(11)的下表面。
6.根据权利要求1所述的一种apm轨道线型检测小车,其特征在于,所述横梁(11)与左竖板(501)、右竖板(502)连接的l型拐角处连接有加强梁(12)。
7.根据权利要求1所述的一种apm轨道线型检测小车,其特征在于,所述导向装置(3)包括:基板(301),旋转电机(302),旋转编码器(303),导向轮座(304),导向轮(305),外杆(306),第一销(307),第二销(308),第三销(309),内杆(3010),滑轨(3011),滑块(3012),过渡板(3013),螺母(3014),螺纹杆(3015),伸缩杆(3016),支撑板(3017);所述螺纹杆(3015)方向与导向轨垂直。
8.根据权利要求7所述的一种apm轨道线型检测小车,其特征在于,所述导向轮(305)安装在导向轮座(304)的下端;所述导向轮座(304)的上端安装在外杆(306)的一端;所述导向轮座(304)有四个,其中一个的上端安装有旋转电机(302),一个的上端安装有旋转编码器(303);所述外杆(306)中部开有孔,通过第一销(307)连接在基板(301)角上;所述外杆(306)的另一端通过第二销(308)与内杆(3010)的一端连接;所述内杆(3010)的另一端通过第三销(309)连接在过渡板(3013)上;所述伸缩杆(3016)一端固定在外杆(306)中部,另一端固定在基板(301)的中部。
9.根据权利要求7所述的一种apm轨道线型检测小车,其特征在于,所述基板(301)安装在横梁(11)中心的下表面;所述基板(301)下表面安装有滑轨(3011),所述滑轨(3011)上安装有两个滑块(3012),所述滑块(3012)安装有过渡板(3013)。
10.根据权利要求7所述的一种apm轨道线型检测小车,其特征在于,所述螺纹杆(3015)穿过两个第三销(309)的环,所述螺纹杆(3015)的两端通过支撑板(3017)与基板(301)连接;所述支撑板(3017)与第三销(309)中间的螺纹杆(3015)上安装有螺母(3014)。
技术总结
本技术属于APM轨道检测技术领域,公开了一种APM轨道线型检测小车,包括:数据采集控制模块,惯导单元,导向装置,电源模块,左竖板,右竖板,左高度测量组件,右高度测量组件,左轨向测量组件,右轨向测量组件,左走行轮,右走行轮,横梁,加强梁,RFID;导向装置与横梁的下表面连接;左走行轮位于左走行面上,右走行轮位于右走行面上;导向装置架设在与左导向轨腹板和右导向轨腹板上方。本技术通过惯导单元获取小车的相对运动轨迹,结合高度测量组件和轨向测量组件,获取走行面相对于车体的高度、车体与导向轨横向距离,实现对走行面高度、导向轨轨向的测量。实现对高度、轨向测量时定位精度的提高,同时测量效率得到提升。
技术研发人员:田益锋,顾培忠,汤培峰,蒋章琪,曹锦磊,徐攀,张奕,许峰
受保护的技术使用者:上海申凯公共交通运营管理有限公司
技术研发日:20221216
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!