一种无人驾驶列车司机操作台的电动罩板的制作方法
1.本实用新型属于轨道交通设备技术领域,特别是涉及到一种无人驾驶列车司机操作台的电动罩板。
背景技术:
2.城市轨道交通是城市公共交通系统的重要组成,在公共交通运输中发挥着重要作用,具有运量大、速度快、安全性高、出行便捷、低碳环保和节约用地等特点。
3.随着城市轨道交通技术的不断发展,无人驾驶列车技术不断成熟,列车可自行完成各项任务,无需人工参与。与此同时,无人驾驶列车在无司机值守状态下,乘客可以直接进入司机室观看列车运行情况,并接触到司机操作台。因此,无人驾驶列车如何将司机操作台设备进行有效保护,同时又能在自动驾驶和人工驾驶模式下快速、方便切换,成为无人驾驶列车司机操作台设计的一个重要组成部分。
4.目前,无人驾驶司机操作台罩板大多为摘挂结构的罩板,罩板通过手动解锁拆卸,由于罩板尺寸及自重原因导致拆卸不便。在有司机值守情况下,罩板拆卸后还需要单独空间和位置进行放置和存储,日常使用和维护非常不方便。
5.因此现有技术当中亟需要一种新型的技术方案来解决这一问题。
技术实现要素:
6.本实用新型所要解决的技术问题是:提供一种无人驾驶列车司机操作台的电动罩板用于解决摘挂结构的罩板拆卸不便,还需要单独空间和位置进行放置和存储,日常使用和维护不方便等技术问题。
7.一种无人驾驶列车司机操作台的电动罩板,包括罩板、电动翻转机构和电气控制盘,
8.所述罩板的两端与电动翻转机构连接;所述电动翻转机构通过机架与列车司机操作台固定连接;
9.所述电动翻转机构包括驱动电机、前端摇杆、后端摇杆和锁闭装置;
10.所述驱动电机的下部与机架固定连接,驱动电机的输出轴与后端摇杆的一端连接;所述后端摇杆的另一端与罩板的后端连接;所述前端摇杆的一端与机架连接,前端摇杆的另一端与罩板的前端连接;所述锁闭装置设置在机架与前端摇杆之间;所述电气控制盘分别与锁闭装置以及驱动电机电性连接。
11.所述罩板的边缘在与列车司机操作台配合连接的位置处设置有密封条和u型排水槽。
12.所述电气控制盘采用plc编程控制器。
13.通过上述设计方案,本实用新型可以带来如下有益效果:
14.本实用新型中电动翻转机构被整体安装在台体骨架上,装配时通过预定位尺寸进行调节并安装罩板。
15.罩板充分考虑了车辆使用空间,摒弃了现有的手动摘挂罩板,避免部件拆装过程中的磕碰损伤,在不拆卸罩板前提下,罩板通过电控实现前移和翻转的同步动作,并半隐藏在司机操作台前端,操作使用非常灵活和便捷。
16.罩板运行由可编程控制器(plc)控制,通过伺服电机驱动,机械构件采用了四连杆形式,罩板采用碳纤维复合材料制成,在保证刚度和强度基础上,最大限度的降低部件重量。
17.在无人驾驶模式下,为避免乘客人为操作罩板滑动,在罩板关闭状态下增加了二次机械锁闭。该锁闭机构采用了电动和手动两种操作模式,手动模式用于断电操作或维修时应用,提升了司机操作台整体产品的智能化和自动化。
附图说明
18.以下结合附图和具体实施方式对本实用新型作进一步的说明:
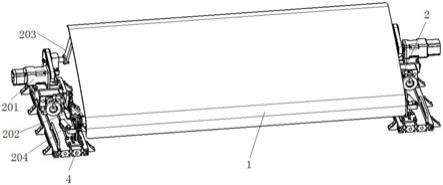
19.图1为本实用新型一种无人驾驶列车司机操作台的电动罩板的结构示意图。
20.图2为本实用新型一种无人驾驶列车司机操作台的电动罩板的闭合状态结构示意图。
21.图3为本实用新型一种无人驾驶列车司机操作台的电动罩板的开启状态结构示意图。
22.图4为本实用新型一种无人驾驶列车司机操作台的电动罩板的电动翻转机构的结构示意图。
23.图中1-罩板、2-电动翻转机构、3-电气控制盘、4-机架、201-驱动电机、202-前端摇杆、203-后端摇杆、204-锁闭装置。
具体实施方式
24.如图所示,一种无人驾驶列车司机操作台的电动罩板,包括罩板1、电动翻转机构2和电气控制盘3,
25.所述罩板1的两端与电动翻转机构2连接;所述电动翻转机构2通过机架4与列车司机操作台固定连接;
26.所述电动翻转机构2包括驱动电机201、前端摇杆202、后端摇杆203和锁闭装置204;
27.所述驱动电机201的下部与机架4固定连接,驱动电机201的输出轴与后端摇杆203的一端连接;所述后端摇杆203的另一端与罩板1的后端连接;所述前端摇杆202的一端与机架4连接,前端摇杆202的另一端与罩板1的前端连接;所述锁闭装置204设置在机架4与前端摇杆202之间;所述电气控制盘3分别与锁闭装置204以及驱动电机201电性连接。
28.所述罩板1的边缘在与列车司机操作台配合连接的位置处设置有密封条和u型排水槽。
29.所述电气控制盘3采用plc编程控制器。
30.操作台台体主要用于安装列车运行各系统主机及元器件;台面主要安装用于监控列车运行状态的显示终端及操作按钮和开关。罩板1采用了轻量化的碳纤维复合材料,在保证部件刚度和强度基础上,最大限度的降低了罩板1的重量。电动翻转机构2采用可靠的四
连杆结构,通过电气控制盘3的plc控制器实现罩板1的解锁、运行、固定、运行、锁闭等一系列动作。
31.罩板1开启:通过控制按钮启动罩板开启运行指令,plc控制器发出解锁指令,并实现电动翻转机构2的解锁动作。
32.后移翻转:解锁动作完成后,plc控制器下达运行指令,通过驱动电机201、前端摇杆202和后端摇杆203的联动实现罩板1的后移和翻转动作,运行至指定位置后通过限位开关向plc控制器反馈到达信号,前端摇杆202和后端摇杆203固定。
33.罩板1关闭:通过控制按钮启动罩板关闭运行指令,plc控制器发出解锁指令,并实现电动翻转机构2的解锁动作。
34.前移翻转:解锁动作完成后,plc控制器下达运行指令,通过驱动电机201、前端摇杆202和后端摇杆203的联动实现罩板1的前移和翻转动作,运行至指定位置后通过限位开关向plc控制器反馈到达信号,前端摇杆202和后端摇杆203锁闭。
35.电动翻转机构2采用了双摇杆的机械原理,罩板1的内侧设置了安装座,分别用于连接前端摇杆202和后端摇杆203。
36.机架4采用铝型材以确保刚度及安装精度,前端摇杆202和后端摇杆203及其它部件分别固定在机架4上,电动翻转机构2通过机架4与司机操作台台体连接固定。
37.电动翻转机构2首先通过plc控制器等电气控制元件实现机构解锁,解锁动作完成后plc下达运行指令,驱动电机201带动后端摇杆203实现往复摆动,最终实现罩板1的开闭动作。
38.为避免液体散落并进入司机操作台内部,司机操作台与罩板1配合位置进行了密封设计,同时增加了u型排水槽,能够有效阻隔液体进入操作台内部。
技术特征:
1.一种无人驾驶列车司机操作台的电动罩板,其特征是:包括罩板(1)、电动翻转机构(2)和电气控制盘(3),所述罩板(1)的两端与电动翻转机构(2)连接;所述电动翻转机构(2)通过机架(4)与列车司机操作台固定连接;所述电动翻转机构(2)包括驱动电机(201)、前端摇杆(202)、后端摇杆(203)和锁闭装置(204);所述驱动电机(201)的下部与机架(4)固定连接,驱动电机(201)的输出轴与后端摇杆(203)的一端连接;所述后端摇杆(203)的另一端与罩板(1)的后端连接;所述前端摇杆(202)的一端与机架(4)连接,前端摇杆(202)的另一端与罩板(1)的前端连接;所述锁闭装置(204)设置在机架(4)与前端摇杆(202)之间;所述电气控制盘(3)分别与锁闭装置(204)以及驱动电机(201)电性连接。2.根据权利要求1所述的一种无人驾驶列车司机操作台的电动罩板,其特征是:所述罩板(1)的边缘在与列车司机操作台配合连接的位置处设置有密封条和u型排水槽。3.根据权利要求1所述的一种无人驾驶列车司机操作台的电动罩板,其特征是:所述电气控制盘(3)采用plc编程控制器。
技术总结
一种无人驾驶列车司机操作台的电动罩板属于轨道交通设备技术领域,包括罩板、电动翻转机构和电气控制盘。本实用新型中罩板充分考虑了车辆使用空间,摒弃了现有的手动摘挂罩板,避免部件拆装过程中的磕碰损伤,在不拆卸罩板前提下,罩板通过电控实现前移和翻转的同步动作,并半隐藏在司机操作台前端,操作使用非常灵活和便捷。罩板运行由可编程控制器(PLC)控制,通过伺服电机驱动,机械构件采用了四连杆形式,罩板采用碳纤维复合材料制成,在保证刚度和强度基础上,最大限度的降低部件重量,提升了司机操作台整体产品的智能化和自动化。化。化。
技术研发人员:杜继远 张岩 李刚 朴东亮 于海涛 董超
受保护的技术使用者:研奥电气股份有限公司
技术研发日:2021.09.07
技术公布日:2022/1/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1