一种基于庞加莱映射分析的列车稳定性评估方法及系统与流程
1.本发明涉及列车安全性技术领域,尤其涉及一种基于庞加莱映射分析的列车稳定性评估方法及系统。
背景技术:
2.随着城市化进程加快,城市交通运输需求量不断增大,城市轨道交通在公共交通领域发挥着愈加重要的作用。随着城市轨道交通的发展,列车的运行安全越来越重要,出于运行安全的高要求,列车必须配备可靠的脱轨检测装置,而目前脱轨检测装置包含接触式和非接触式,接触式脱轨检测装置通过与轨面碰撞检测,存在损伤转向架的风险,因此非接触式脱轨检测装置成为主导的研究方向。目前各种的非接触式检测方法存在可靠性及误报的风险。
3.目前,国内外关于列车横向运动稳定性的评判方法并不统一,我国现有的列车横向运动稳定性评判方法仍沿用早期老式普速列车的评判指标和限值,而现代城市轨道交通的列车运行环境、线路条件、轮轨型面、车辆结构参数等和老式普速列车明显不同,其横向运动稳定性评判方法不能一概而论。
4.公开号为cn110274776a的专利公布了一种评判高速列车横向运动稳定性的方法,该方案基于转向架构横向振动加速度信号分析高速列车的横向运动稳定性,仅考虑了转向架的横向加速度,没有对列车的三维综合运动状况进行分析,受到的干扰较大,分析的精度受限。公开号为cn112722003a的专利公布了一种基于车轮抬升量的列车脱轨风险监测系统,该发明只能检测到列车车轮在竖直方向的抬升量,难以发现列车的横向失稳,其应用场景有限。公开号为cn113343811a的专利公开了一种列车脱轨判别的方法,该方法使用了列车车轴箱的振动加速度信号进行非稳定性分析,该分析方法没有考虑到列车正常行驶时上下坡和转向带来的加速度变化,容易导致误判发生,应用场景有限。
技术实现要素:
5.鉴于此,本发明提供一种基于庞加莱映射分析的列车稳定性评估方法及系统,利用构建的庞加莱映射对列车稳定性进行判断,能够区分出由列车正常运行变化时所带来的运动状态变化,以及由列车失稳运行所带来的运动状态变化。
6.为实现上述目的,本发明提供一种基于庞加莱映射分析的列车稳定性评估方法,所述方法包括步骤:
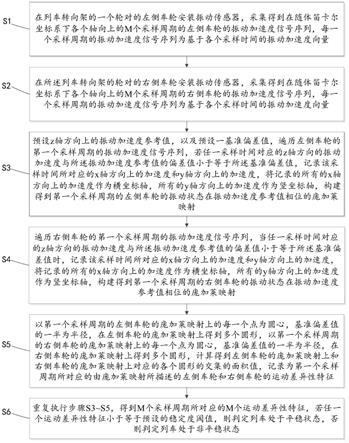
7.s1、在列车转向架的一个轮对的左侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的m个采样周期的左侧车轮的振动加速度信号序列,每一个采样周期的振动加速度信号序列为基于各个采样时间的振动加速度向量;
8.s2、在所述列车转向架的轮对的右侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的m个采样周期的右侧车轮的振动加速度信号序列,每一个采样周期的振动加速度信号序列为基于各个采样时间的振动加速度向量;
9.s3、预设z轴方向上的振动加速度参考值,以及预设一基准偏差值,遍历左侧车轮的第一个采样周期的振动加速度信号序列,若任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值,记录该采样时间所对应的x轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到第一个采样周期的左侧车轮的振动状态在振动加速度参考值相位的庞加莱映射;
10.s4、遍历右侧车轮的第一个采样周期的振动加速度信号序列,当任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值时,记录该采样时间所对应的x轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到第一个采样周期的右侧车轮的振动状态在振动加速度参考值相位的庞加莱映射;
11.s5、以第一个采样周期的左侧车轮的庞加莱映射上的每一个点为圆心,基准偏差值的一半为半径,在左侧车轮的庞加莱映射上得到多个圆形,以第一个采样周期的右侧车轮的庞加莱映射上的每一个点为圆心,基准偏差值的一半为半径,在右侧车轮的庞加莱映射上得到多个圆形,计算得到左侧车轮的庞加莱映射上和右侧车轮的庞加莱映射上对应的各个圆形的交集的面积值,记录为第一个采样周期所对应的由庞加莱映射所描述的左侧车轮和右侧车轮的运动差异性特征;
12.s6、重复执行步骤s3~s5,得到m个采样周期所对应的m个运动差异性特征,若任一个运动差异性特征小于等于预设的稳定度阈值,则判定列车处于平稳状态,否则判定列车处于非平稳状态。
13.优选的,所述步骤s1包括:
14.构建随体笛卡尔坐标系,以列车行进方向为x轴的正方向,以列车垂直向上为y轴的正方向,沿着列车车轴向外为z轴的正方向。
15.优选的,所述步骤s1包括:
16.获取第一个采样周期t0~tn内的x、y、z三个轴向上左侧车轮的振动加速度信号序列a
l
为:
[0017][0018]
其中,a
lxn
为左侧车轮在tn时刻x轴方向的振动加速度,a
lyn
为左侧车轮在tn时刻y轴方向的振动加速度,a
lzn
为左侧车轮在tn时刻z轴方向的振动加速度,t0,t1,
…
,tn,
…
,tn为振动传感器的采样时间点。
[0019]
优选的,所述步骤s1包括:
[0020]
对于任意一个时间点tn,该时间点tn和下一个时间点t
n+1
的间隔为:
[0021]
[0022]
其中,v
ref
为列车运行的额定速度,f
ref
为额定速度下的额定采样频率,v
n+1
为列车在t
n+1
时刻的实际运行速度,vn为列车在时刻tn的实际运行速度。
[0023]
优选的,所述步骤s2包括:
[0024]
获取第一个采样周期t0~tn内的x、y、z三个轴向上右侧车轮的振动加速度信号序列ar为:
[0025][0026]
其中,a
rxn
为右侧车轮在tn时刻x轴方向的振动加速度,a
ryn
为右侧车轮在tn时刻y轴方向的振动加速度,a
rzn
为右侧车轮在tn时刻z轴方向的振动加速度,t0,t1,
…
,tn,
…
,tn为振动传感器的采样时间点。
[0027]
优选的,所述步骤s3具体包括:
[0028]
设定一个z轴方向上的振动加速度参考值a
zref
,并设定一个基准偏差值ε,在左侧车轮的第一个采样周期的振动加速度信号序列a
l
中进行遍历,当任一采样时间tn对应的z轴方向上的振动加速度a
lzn
与振动加速度参考值a
zref
的偏差值小于基准偏差值ε时,记录该采样时间tn所对应的x轴方向上的振动加速度a
lxn
和y轴方向上的振动加速度a
lyn
,依次遍历完所有采样时间所对应的z轴方向上的振动加速度,得到满足条件的所有的x轴方向上的振动加速度a
lxn
和y轴方向上的振动加速度a
lyn
的p个的点的集合p
al
为:
[0029][0030]
将点集p
al
中的x轴方向上的振动加速度a
lxn
作为横坐标轴,将点集p
al
中的y轴方向上的振动加速度a
lyn
作为竖坐标轴,构建得到第一个采样周期的左侧车轮振动状态在振动加速度参考值a
zref
相位的庞加莱映射。
[0031]
优选的,所述步骤s4包括:
[0032]
基于设定的z轴方向上的振动加速度参考值a
zref
以及基准偏差值ε,在右侧车轮的第一个采样周期的振动加速度信号序列ar中进行遍历,当任一采样时间tn对应的z轴方向上的振动加速度a
rzn
与振动加速度参考值a
zref
的偏差值小于基准偏差值ε时,记录该采样时间tn所对应的x轴方向上的振动加速度a
rxn
和y轴方向上的振动加速度a
ryn
,依次遍历完所有采样时间所对应的z轴方向上的振动加速度,得到满足条件的所有的x轴方向上的振动加速度a
rxn
和y轴方向上的振动加速度a
ryn
的q个的点的集合p
ar
为:
[0033][0034]
将点集p
ar
中的x轴方向上的振动加速度a
rxn
作为横坐标轴,将点集p
arl
中的y轴方向上的振动加速度a
ryn
作为竖坐标轴,构建得到第一个采样周期的右侧车轮振动状态在振动加速度参考值a
zref
相位的庞加莱映射。
[0035]
优选的,所述步骤s5包括:
[0036]
计算得到左侧车轮的庞加莱映射和右侧车轮的庞加莱映射上对应的各个圆形的交集的面积值sn为:
[0037]
sn=s(p
al
)∩s(p
ar
)
ꢀꢀ
(6)。
[0038]
优选的,所述步骤s5具体包括:
[0039]
预先设定稳定度阈值δ,当任意一个采样周期t
mn
到t
(m+1)n
时间点内由庞加莱映射所述描述的左侧车轮和右侧车轮的运动差异性特征s
mn
小于等于δ时,则判定列车在该采样周期内处于平稳行驶状态;
[0040]
若运动差异性特征s
mn
大于δ时,根据运动差异性特征计算特征单调性ss
mn
为:
[0041][0042]
若ss
mn
大于等0时,则判定列车在该采样周期内处于固定加速度、转弯、上下坡或者加减速状态,若ss
mn
小于0时,则判定列车在该采样周期内处于失稳状态。
[0043]
为实现上述目的,本发明提供一种基于庞加莱映射分析的列车稳定性系统,所述系统包括:
[0044]
第一采样模块,在列车转向架的一个轮对的左侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的m个采样周期的左侧车轮的振动加速度信号序列,每一个采样周期的振动加速度信号序列为基于各个采样时间的振动加速度向量;
[0045]
第二采样模块,在所述列车转向架的轮对的右侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的m个采样周期的右侧车轮的振动加速度信号序列,每一个采样周期的振动加速度信号序列为基于各个采样时间的振动加速度向量;
[0046]
第一庞加莱映射模块,预设z轴方向上的振动加速度参考值,以及预设一基准偏差值,遍历左侧车轮的第一个采样周期的振动加速度信号序列,若任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值,记录该采样时间所对应的x轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到第一个采样周期的左侧车轮的振动状态在振动加速度参考值相位的庞加莱映射;
[0047]
第二庞加莱映射模块,遍历右侧车轮的第一个采样周期的振动加速度信号序列,当任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值时,记录该采样时间所对应的x轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到第一个采样周期的右侧车轮的振动状态在振动加速度参考值相位的庞加莱映
射;
[0048]
差异特征模块,以第一个采样周期的左侧车轮的庞加莱映射上的每一个点为圆心,基准偏差值的一半为半径,在左侧车轮的庞加莱映射上得到多个圆形,以第一个采样周期的右侧车轮的庞加莱映射上的每一个点为圆心,基准偏差值的一半为半径,在右侧车轮的庞加莱映射上得到多个圆形,计算得到左侧车轮的庞加莱映射上和右侧车轮的庞加莱映射上对应的各个圆形的交集的面积值,记录为第一个采样周期所对应的由庞加莱映射所描述的左侧车轮和右侧车轮的运动差异性特征;
[0049]
判断模块,重复执行第二庞加莱映射模块、第一庞加莱映射模块以及差异特征模块,得到m个采样周期所对应的m个运动差异性特征,若任一个运动差异性特征小于预设的稳定度阈值,则判定列车处于平稳状态,否则判定列车处于非平稳状态。
[0050]
与现有技术相比,本发明提供的一种基于庞加莱映射分析的列车稳定性评估方法及系统,所带来的有益效果为:利用构建庞加莱截面的方法对列车的稳定性进行判断,能够区分出由列车正常运行变化时(上升、加速、转向)所带来的运动状态变化,以及由列车失稳运行所带来的运动状态变化,能够更加精确地判断列车的稳定性;根据列车运行时两侧车轴箱的振动信号对列车的稳定性进行分析,对列车的运行状况进行了更全面和更精准地判断,从而提高了列车稳定性的预判精准度,减少了列车运行状况的误判率,提高了列车运行的安全性。
附图说明
[0051]
图1是根据本发明的一个实施例的基于庞加莱映射分析的列车稳定性评估方法的流程示意图。
[0052]
图2是根据本发明的一个实施例的基于庞加莱映射分析的列车稳定性评估系统的系统框图。
具体实施方式
[0053]
以下将结合附图所示的具体实施方式对本发明进行详细描述,但这些实施方式并不限制本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
[0054]
如图1所示的本发明的一个实施例,本发明提供一种基于庞加莱映射分析的列车稳定性评估方法,所述方法包括步骤:
[0055]
s1、在列车转向架的一个轮对的左侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的m个采样周期的左侧车轮的振动加速度信号序列,每一个采样周期的振动加速度信号序列为基于各个采样时间的振动加速度向量;
[0056]
s2、在所述列车转向架的轮对的右侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的m个采样周期的右侧车轮的振动加速度信号序列,每一个采样周期的振动加速度信号序列为基于各个采样时间的振动加速度向量;
[0057]
s3、预设z轴方向上的振动加速度参考值,以及预设一基准偏差值,遍历左侧车轮的第一个采样周期的振动加速度信号序列,若任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值,记录该采样时间所对应的x
轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到第一个采样周期的左侧车轮的振动状态在振动加速度参考值相位的庞加莱映射;
[0058]
s4、遍历右侧车轮的第一个采样周期的振动加速度信号序列,当任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值时,记录该采样时间所对应的x轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到第一个采样周期的右侧车轮的振动状态在振动加速度参考值相位的庞加莱映射;
[0059]
s5、以第一个采样周期的左侧车轮的庞加莱映射上的每一个点为圆心,基准偏差值的一半为半径,在左侧车轮的庞加莱映射上得到多个圆形,以第一个采样周期的右侧车轮的庞加莱映射上的每一个点为圆心,基准偏差值的一半为半径,在右侧车轮的庞加莱映射上得到多个圆形,计算得到左侧车轮的庞加莱映射上和右侧车轮的庞加莱映射上对应的各个圆形的交集的面积值,记录为第一个采样周期所对应的由庞加莱映射所描述的左侧车轮和右侧车轮的运动差异性特征;
[0060]
s6、重复执行步骤s3~s5,得到m个采样周期所对应的m个运动差异性特征,若任一个运动差异性特征小于等于预设的稳定度阈值,则判定列车处于平稳状态,否则判定列车处于非平稳状态。
[0061]
在列车转向架的一个轮对的左侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的左侧车轮的振动加速度信号序列,所述振动加速度信号序列为基于各个采样时间的振动加速度向量。选定列车的一个转向架,在该转向架的一个轮对的左侧车轮的轮轴箱上安装一个振动传感器,通过该振动传感器采集列车运行时左侧车轮的振动加速度数据,一共采集m个采样周期,每个采样周期为tn,一个采样周期内的采样时间取值为t0~tn,以t0~tn为第一个采样周期,tn~t
2n
为第二个采样周期,以此类推共采集m个采样周期的振动加速度数据,获取得到在随体笛卡尔坐标系下各个轴向上的m个采样周期的左侧车轮的振动加速度信号序列,每一个采样周期的振动加速度信号序列为基于各个采样时间的振动加速度向量。
[0062]
构建随体笛卡尔坐标系,即构建x、y、z三轴坐标体系,以列车行进方向为x轴的正方向,以列车垂直向上为y轴的正方向,沿着列车车轴向外为z轴的正方向。列车运行时,通过振动传感器采集得到的左侧车轮的振动加速度数据,该振动加速度数据为三维向量的数据,即x、y、z三轴坐标体系下三个轴向上的振动加速度信号,因此获取第一个采样周期t0~tn内的x、y、z三个轴向上左侧车轮的振动加速度信号序列a
l
为:
[0063][0064]
其中,a
lxn
为左侧车轮在tn时刻x轴方向的振动加速度,a
lyn
为左侧车轮在tn时刻y轴方向的振动加速度,a
lzn
为左侧车轮在tn时刻z轴方向的振动加速度,t0,t1,
…
,tn,
…
,tn为振
动传感器的采样时间点。
[0065]
采样间隔不是固定的,而是基于键相点进行采集,即采样间隔是基于列车的运行速度进行实时调整。对于任意一个时间点tn,该时间点tn和下一个时间点t
n+1
的间隔为:
[0066][0067]
其中,v
ref
为列车运行的额定速度,f
ref
为额定速度下的额定采样频率,v
n+1
为列车在t
n+1
时刻的实际运行速度,vn为列车在时刻tn的实际运行速度。
[0068]
在所述列车转向架的轮对的右侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的右侧车轮的振动加速度信号序列,所述振动加速度信号序列为基于各个采样时间的振动加速度向量。同样的,对该转向架的轮对的右侧车轮的轮轴箱上安装一个振动传感器,通过该振动传感器采集列车运行时右侧车轮的振动加速度数据,,一共采集m个采样周期,每个采样周期为tn,一个采样周期内的采样时间取值为t0~tn,以t0~tn为第一个采样周期,tn~t
2n
为第二个采样周期,以此类推共采集m个采样周期的振动加速度数据,获取得到在随体笛卡尔坐标系下各个轴向上m个采样周期的右侧车轮的振动加速度信号序列,每一个采样轴的振动加速度信号序列为基于各个采样时间的振动加速度向量。
[0069]
同样的,构建随体笛卡尔坐标系,即构建x、y、z三轴坐标体系,以列车行进方向为x轴的正方向,以列车垂直向上为y轴的正方向,沿着列车车轴向外为z轴的正方向。列车运行时,通过振动传感器采集得到的右侧车轮的振动加速度数据,该振动加速度数据为三维向量的数据,即x、y、z三轴坐标体系下三个轴向上的振动加速度信号,因此获取第一个采样周期t0~tn内的x、y、z三个轴向上右侧车轮的振动加速度信号序列ar为:
[0070][0071]
其中,a
rxn
为右侧车轮在tn时刻x轴方向的振动加速度,a
ryn
为右侧车轮在tn时刻y轴方向的振动加速度,a
rzn
为右侧车轮在tn时刻z轴方向的振动加速度,t0,t1,
…
,tn,
…
,tn为振动传感器的采样时间点。采样间隔不是固定的,而是基于键相点进行采集,即采样间隔是基于列车的运行速度进行实时调整。对于任意一个时间点tn,该时间点tn和下一个时间点t
n+1
的间隔为通过上述公式(3)计算得到。
[0072]
预设z轴方向上的振动加速度参考值,以及预设一基准偏差值,遍历所述左侧车轮的振动加速度信号序列,若任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值,记录该采样时间所对应的x轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到左侧车轮的振动状态在振动加速度参考值相位的庞加莱映射。对于左侧车轮,在z轴方向上构建庞加莱映射,构建方法具体为:预先设定一个z轴方向上的振动加速度参考值a
zref
,并设定一个基准偏差值ε,在左侧车轮的振动加速度信号序列a
l
中进行遍历,当任一采样时间tn对应的z轴方向上的振动加速度a
lzn
与振动加速度参
考值a
zref
的偏差值小于基准偏差值ε时,记录该采样时间tn所对应的x轴方向上的振动加速度a
lxn
和y轴方向上的振动加速度a
lyn
,依次遍历完所有采样时间所对应的z轴方向上的振动加速度,得到满足条件的所有的x轴方向上的振动加速度a
lxn
和y轴方向上的振动加速度a
lyn
的p个点的集合p
al
为:
[0073][0074]
将点集p
al
中的x轴方向上的振动加速度a
lxn
作为横坐标轴,将点集p
al
中的y轴方向上的振动加速度a
lyn
作为竖坐标轴,构建得到第一个采样周期的左侧车轮振动状态在振动加速度参考值a
zref
相位的庞加莱映射。
[0075]
遍历所述右侧车轮的振动加速度信号序列,若任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值,记录该采样时间所对应的x轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到右侧车轮的振动状态在振动加速度参考值相位的庞加莱映射。同样的,对于右侧车轮,在z轴方向上构建庞加莱映射,构建方法具体为:基于设定的z轴方向上的振动加速度参考值a
zref
以及基准偏差值ε,在右侧车轮的振动加速度信号序列ar中进行遍历,当任一采样时间tn对应的z轴方向上的振动加速度a
rzn
与振动加速度参考值a
zref
的偏差值小于基准偏差值ε时,记录该采样时间tn所对应的x轴方向上的振动加速度a
rxn
和y轴方向上的振动加速度a
ryn
,依次遍历完所有采样时间所对应的z轴方向上的振动加速度,得到满足条件的所有的x轴方向上的振动加速度a
rxn
和y轴方向上的振动加速度a
ryn
的q个点的集合p
ar
为:
[0076][0077]
将点集p
ar
中的x轴方向上的振动加速度a
rxn
作为横坐标轴,将点集p
arl
中的y轴方向上的振动加速度a
ryn
作为竖坐标轴,构建得到第一个采样周期的右侧车轮振动状态在振动加速度参考值a
zref
相位的庞加莱映射。
[0078]
以第一个采样周期的左侧车轮的庞加莱映射上的每一个点为圆心,基准偏差值的一半为半径,在左侧车轮的庞加莱映射上得到多个圆形,以第一个采样周期的右侧车轮的庞加莱映射上的每一个点为圆心,基准偏差值的一半为半径,在右侧车轮的庞加莱映射上得到多个圆形,计算得到左侧车轮的庞加莱映射上和右侧车轮的庞加莱映射上对应的各个圆形的交集的面积值,记录为第一个采样周期所对应的由庞加莱映射所描述的左侧车轮和右侧车轮的运动差异性特征。计算得到左侧车轮的庞加莱映射和右侧车轮的庞加莱映射上对应的各个圆形的交集的面积值sn为:
[0079]
sn=s(p
al
)∩s(p
ar
)
ꢀꢀ
(6);
[0080]
sn代表了从t0到tn时间点内,由庞加莱映射所描述的左侧车轮和右侧车轮的运动差异性特征。使用同样的方法,对左侧车轮的第二个采样周期tn到t
2n
的振动加速度信号序列,以及右前侧车轮的第二个采样周期tn到t
2n
的振动加速度信号序列进行处理,得到第二采样周期tn到t
2n
时间点内,对应的由庞加莱映射所描述的左侧车轮和右侧车轮的运动差异性特征s
2n
,以此类推得到m个采样周期所对应的m个由庞加莱映射所描述的左侧车轮和右侧车轮的运动差异性特征为s
1n
、s
2n
…
,s
mn
,对这些运动差异性特征数据进行分析,以判断列车的运行状态。
[0081]
根据得到的m个运动差异性特征,若任一个运动差异性特征小于预设的稳定度阈值,则判定列车处于平稳状态,否则判定列车处于非平稳状态。具体地,预先设定稳定度阈值δ,当任意一个采样周期t
mn
到t
(m+1)n
时间点内由庞加莱映射所述描述的左侧车轮和右侧车轮的运动差异性特征s
mn
小于等于δ时,则判定列车在该采样周期内处于平稳行驶状态。若运动差异性特征s
mn
大于δ时,对列车状态做进一步地判断,根据运动差异性特征计算特征单调性ss
mn
为:
[0082][0083]
根据计算得到的单调性ss
mn
进行判断,若ss
mn
大于等0时,则判定该采样周期内处于单调增长或者降低的过程,判定列车在该采样周期内处于固定加速度、转弯、上下坡或者加减速状态。若运动差异性特征s
mn
大于δ并且特征单调性ss
mn
小于0时,则判定列车在该采样周期内处于失稳状态。
[0084]
如图2所示的本发明的一个实施例,本发明提供一种基于庞加莱映射分析的列车稳定性系统,所述系统包括:
[0085]
第一采样模块20,在列车转向架的一个轮对的左侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的m个采样周期的左侧车轮的振动加速度信号序列,每一个采样周期的振动加速度信号序列为基于各个采样时间的振动加速度向量;
[0086]
第二采样模块21,在所述列车转向架的轮对的右侧车轮安装振动传感器,采集得到在随体笛卡尔坐标系下各个轴向上的m个采样周期的右侧车轮的振动加速度信号序列,每一个采样周期的振动加速度信号序列为基于各个采样时间的振动加速度向量;
[0087]
第一庞加莱映射模块22,预设z轴方向上的振动加速度参考值,以及预设一基准偏差值,遍历左侧车轮的第一个采样周期的振动加速度信号序列,若任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值,记录该采样时间所对应的x轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到第一个采样周期的左侧车轮的振动状态在振动加速度参考值相位的庞加莱映射;
[0088]
第二庞加莱映射模块23,遍历右侧车轮的第一个采样周期的振动加速度信号序列,当任一采样时间对应的z轴方向的振动加速度与所述振动加速度参考值的偏差值小于等于所述基准偏差值时,记录该采样时间所对应的x轴方向上的加速度和y轴方向上的加速度,将记录的所有的x轴方向上的加速度作为横坐标轴,所有的y轴方向上的加速度作为竖坐标轴,构建得到第一个采样周期的右侧车轮的振动状态在振动加速度参考值相位的庞加莱映射;
[0089]
差异特征模块24,以第一个采样周期的左侧车轮的庞加莱映射上的每一个点为圆
心,基准偏差值的一半为半径,在左侧车轮的庞加莱映射上得到多个圆形,以第一个采样周期的右侧车轮的庞加莱映射上的每一个点为圆心,基准偏差值的一半为半径,在右侧车轮的庞加莱映射上得到多个圆形,计算得到左侧车轮的庞加莱映射上和右侧车轮的庞加莱映射上对应的各个圆形的交集的面积值,记录为第一个采样周期所对应的由庞加莱映射所描述的左侧车轮和右侧车轮的运动差异性特征;
[0090]
判断模块25,重复执行第二庞加莱映射模块、第一庞加莱映射模块以及差异特征模块,得到m个采样周期所对应的m个运动差异性特征,若任一个运动差异性特征小于预设的稳定度阈值,则判定列车处于平稳状态,否则判定列车处于非平稳状态。
[0091]
尽管为示例目的,已经公开了本发明的优选实施方式,但是本领域的普通技术人员将意识到,在不脱离由所附的权利要求书公开的本发明的范围和精神的情况下,各种改进、增加以及取代是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1