具有避障功能的索道巡检机器人的制作方法
1.本发明涉及巡检机器人技术领域,特别涉及一种具有避障功能的索道巡检机器人。
背景技术:
2.在现代工业和科技的推动下,索道的应用越来越广泛,从常规应用于矿井巷道的猴车到旅游景点运人载货的缆车,逐渐发展到利用索道搭建的智慧物流快线、索道巡检机器人等各个领域。
3.在索道式巡检机器人的使用场景中,通常是被应用在空间狭窄、障碍交错的复杂环境中,这本身也是索道式巡检机器人更能适应复杂使用环境的显著优势。当巡检机器人在运行路径中碰到无法通过的墙面或柱体等障碍物时,而索道却恰好能通过的情况时,现在有技术中的常规解决方法是在这段有障碍物的区域内增设索道改向轮和内弯抗绳轮使索道绕过障碍区域,需要考虑是否有足够索道绕行的空间,增加索道系统的复杂性和建设成本。
4.
技术实现要素:
5.根据本发明实施例,提供了一种具有避障功能的索道巡检机器人,包含:巡检机器人、抱索器与导向组件;抱索器的一端铰接在巡检机器人的顶部,抱索器的另一端与外部的索道相连;导向组件设置在外部的障碍物上,用于对巡检机器人进行导向。
6.进一步,抱索器为固定式抱索器。
7.进一步,导向组件包含:一对导向滑板对称设置在障碍物两侧的侧壁上,一对导向滑板的导向与巡检机器人行进路线相匹配,用于对巡检机器人进行导向。
8.进一步,导向滑板与巡检机器人的接触面为弧面。
9.进一步,还包含:若干个导向轮,若干个导向轮设置在巡检机器人的顶部,当巡检机器人通过障碍物时,若干个导向轮与导向组件相抵接,用于对巡检机器人进行导向。
10.进一步,还包含:若干个防磨块,若干个防磨块均匀设置在巡检机器人的侧壁上。
11.进一步,还包含:索道扣绳轮,索道扣绳轮设置在障碍物面向障碍物的侧壁上,索道扣绳轮与索道相连,用于对索道进行限位。
12.根据本发明实施例的具有避障功能的索道巡检机器人,在巡检机器人经过障碍物时,无需增设索道改向轮和内弯抗绳轮使索道绕过障碍区域,解决了现有技术会增加索道系统的复杂性和建设成本的缺陷,更加平稳、流畅,巡检机器人在规避障碍物的过程中无需绕行,降低了索道建设成本。
13.要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并 且意图在于提供要求保护的技术的进一步说明。
14.附图说明
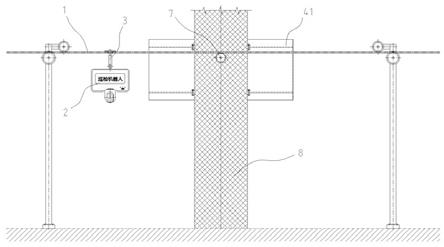
15.图1为根据本发明实施例具有避障功能的索道巡检机器人的主视图;图2为根据本发明实施例具有避障功能的索道巡检机器人的俯视图;图3为根据本发明实施例具有避障功能的索道巡检机器人的侧视图;图4为图3中a处的局部放大图。
16.具体实施方式
17.以下将结合附图,详细描述本发明的优选实施例,对本发明做进一步阐述。
18.首先,将结合图1~4描述根据本发明实施例的具有避障功能的索道巡检机器人,用于巡检索道1,其应用场景广阔。
19.如图1~4所示,本发明实施例的具有避障功能的索道巡检机器人,包含:巡检机器人2、抱索器3与导向组件。
20.具体地,如图1~4所述,抱索器3的一端铰接在巡检机器人2的顶部,抱索器3的另一端与外部的索道1相连,在巡检机器人2规避障碍物8时确保巡检机器人2平稳运行,不会倾斜;导向组件设置在外部的障碍物8上,用于对巡检机器人2进行导向。
21.进一步,如图1~4所述,抱索器3为固定式抱索器3。
22.进一步,如图1~4所述,导向组件包含:一对导向滑板41对称设置在障碍物8两侧的侧壁上,一对导向滑板41的导向与巡检机器人2行进路线相匹配,用于对巡检机器人2进行导向,解决了现有技术会增加索道1系统的复杂性和建设成本的缺陷,巡检机器人2在规避障碍物8的过程中无需绕行,降低了索道1建设成本。
23.进一步,如图1~4所述,导向滑板41与巡检机器人2的接触面为弧面,使本实施例具有运行平稳、流畅的特点。
24.进一步,如图1~4所述,还包含:若干个导向轮5,若干个导向轮5设置在巡检机器人2的顶部,当巡检机器人2通过障碍物8时,若干个导向轮5与导向组件相抵接,用于对巡检机器人2进行导向,当巡检机器人2通过障碍物8时,导向轮5通过与导向滑板41与障碍物8抵接,支撑巡检机器人2进行侧移,使巡检机器人2从障碍物8的一侧通过,解决了现有技术会增加索道1系统的复杂性和建设成本的缺陷,巡检机器人2在规避障碍物8的过程中无需绕行,降低了索道1建设成本,使本实施例具备很强的实用性。
25.进一步,如图1~4所述,还包含:若干个防磨块6,若干个防磨块6均匀设置在巡检机器人2的侧壁上,减小了巡检机器人2与导向滑板41、障碍物8的接触面积,进而降低巡检机器人2在通过障碍物8的过程中所受到的摩擦阻力,使本实施例具有运行平稳、流畅的特点,避免巡检机器人2的外壁被磨损。
26.进一步,如图1~4所述,还包含:索道扣绳轮7,索道扣绳轮7设置在障碍物8面向障碍物8的侧壁上,索道扣绳轮7与索道1相连,用于对索道1进行限位,防止巡检机器人2在通过障碍物8的过程中索道1发生吊绳故障。
27.当设备运行时,抱索器3带动巡检机器人2沿索道1的导向移动,当巡检机器人2通
过障碍物8时,导向轮5和摩擦块与一个导向滑板41相抵接,巡检机器人2受到来自导向滑板41的水平方向的支撑力发生侧移,使巡检机器人2顺利从障碍物8的一侧经过。
28.以上,参照图1~4描述了根据本发明实施例的具有避障功能的索道巡检机器人,在巡检机器人经过障碍物时,无需增设索道改向轮和内弯抗绳轮使索道绕过障碍区域,解决了现有技术会增加索道系统的复杂性和建设成本的缺陷,更加平稳、流畅,巡检机器人在规避障碍物的过程中无需绕行,降低了索道建设成本。
29.需要说明的是,在本说明书中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包含
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
30.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
技术特征:
1.一种具有避障功能的索道巡检机器人,其特征在于,包含:巡检机器人、抱索器与导向组件;所述抱索器的一端铰接在所述巡检机器人的顶部,所述抱索器的另一端与外部的索道相连;所述导向组件设置在外部的障碍物上,用于对所述巡检机器人进行导向。2.如权利要求1所述具有避障功能的索道巡检机器人,其特征在于,所述抱索器为固定式抱索器。3.如权利要求1所述具有避障功能的索道巡检机器人,其特征在于,所述导向组件包含:一对导向滑板对称设置在所述障碍物两侧的侧壁上,所述一对导向滑板的导向与所述巡检机器人行进路线相匹配,用于对所述巡检机器人进行导向。4.如权利要求3所述具有避障功能的索道巡检机器人,其特征在于,所述导向滑板与所述巡检机器人的接触面为弧面。5.如权利要求1所述具有避障功能的索道巡检机器人,其特征在于,还包含:若干个导向轮,所述若干个导向轮设置在所述巡检机器人的顶部,当所述巡检机器人通过所述障碍物时,所述若干个导向轮与所述导向组件相抵接,用于对所述巡检机器人进行导向。6.如权利要求1所述具有避障功能的索道巡检机器人,其特征在于,还包含:若干个防磨块,所述若干个防磨块均匀设置在所述巡检机器人的侧壁上。7.如权利要求1所述具有避障功能的索道巡检机器人,其特征在于,还包含:索道扣绳轮,所述索道扣绳轮设置在所述障碍物面向所述障碍物的侧壁上,所述索道扣绳轮与所述索道相连,用于对所述索道进行限位。
技术总结
本发明公开了一种具有避障功能的索道巡检机器人,包含:巡检机器人、抱索器与导向组件;抱索器的一端铰接在巡检机器人的顶部,抱索器的另一端与外部的索道相连;导向组件设置在外部的障碍物上,用于对巡检机器人进行导向。本发明在巡检机器人经过障碍物时,无需增设索道改向轮和内弯抗绳轮使索道绕过障碍区域,解决了现有技术会增加索道系统的复杂性和建设成本的缺陷,更加平稳、流畅,巡检机器人在规避障碍物的过程中无需绕行,降低了索道建设成本。成本。成本。
技术研发人员:程明 李泽华 项江 王宏光 杨新航 马骏 张云飞 王贵彬 赵涛 郭健 翟金星 包胡日查 张敬辉 周作发
受保护的技术使用者:北京汇力智能科技有限公司
技术研发日:2022.02.10
技术公布日:2022/4/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1