一种适用于电动单轨运输机的可遥控避障装置、运输车
1.本发明涉及山地果园运输设备技术领域,具体涉及一种适用于电动单轨运输机的可遥控避障装置、运输车。
背景技术:
2.20世纪60年代以来,国外在果园机械装备方面发展较快,研制了各种类型的运输作业机械应用于果园。但果园机械化程度较高的欧美、日本等国家所设计的运输机并不适用于我国。近年来国内在轨道运输方面的研究主要应用于工业、采矿业等,在山区果园应用方面仍处于研究起步阶段。
3.单轨运输机主要应用于地形复杂、人工作业困难的果园。单轨运输机具备以下特点:单轨运输装备结构简单、尺寸小、能在较大坡度的果园内灵活作业;单轨运输机操作简单、易懂易学、危险性小;单轨运输机动力装置选择多样,适合山地丘陵地形的工作条件和不同的工作要求。
4.基于燃油机动力的单轨运输机在运输过程中必然会产生噪音和振动,对丘陵山区果园单轨基础建设要求高;由于受园区自然条件限制,燃油式山地果园单轨车后期保养维护需投入较多的人力和物力。低速运输的电动式山地果园单轨车动力更强,因为在同功率的情况下,且在低转速的情况下,电动机的扭矩更大。牵引机采用电动机的果园运输车大多结构简单,运转、传动部件少,后期维修保养工作量可大幅减少;同时,电动式山地果园单轨车工作时不产生废气,对果园环境保护十分有益,并且电动式果园单轨车较燃油机工作时产生的噪声和振动也要小得多。在制动过程中,电动机还可在制动减速的同时实现能量的回收再利用,在保证货物运输安全的情况下最大限度地减少对石油资源的依赖。因此,电动山地果园单轨车在环境适应性上比较贴合丘陵山区果园应用
5.目前电动单轨运输机存在的主要问题是智能化水平较低,体现在:避障能力弱,容易因障碍物降低电动单轨运输机运行的安全性以及使用寿命;遥控功能羸弱,目前带遥控功能的电动单轨运输机的实际遥控距离仅在100米以内,有待加强。
技术实现要素:
6.针对现有技术中存在的技术问题,本发明的目的是:提供一种自动识别障碍,可实现远距离遥控的适用于电动单轨运输机的可遥控避障装置。
7.本发明的另一个目的是:提供一种具有避障功能且可以远距离遥控的运输车。
8.为了达到上述目的,本发明采用如下技术方案:
9.一种适用于电动单轨运输机的可遥控避障装置,避障装置与运输机连接,避障装置在轨道上移动;避障装置包括控制盒、通讯天线、漫反射传感器、距离传感器、连接部件、松紧调节部件、运动机构和夹紧机构;控制盒安装在运动机构上,运动机构的滚轮与轨道滚动连接,夹紧机构的滚轮与轨道滚动连接,夹紧机构与运动机构连接,运动机构位于轨道上方;连接部件与运动机构的端部连接用以连接运输机,松紧调节部件安装在夹紧机构用以
调节夹紧机构和运动机构对轨道的压力;漫反射传感器安装在控制盒,漫反射传感器位于控制盒的前进方向上,距离传感器安装在控制盒,距离传感器位于控制盒的底部朝向地面设置;通讯天线与控制盒连接,控制盒与运输机电性连接。
10.作为一种优选,运动机构包括竖向连接板、横梁、第一滚轮和转轴;竖向连接板的数量为四个,横梁的数量为两个,第一滚轮的数量为两个,转轴的数量为两个,控制盒为立方体结构;四个竖向连接板的一端分别与控制盒的四个边角连接,每两个竖向连接板的另一端与一个横梁的两端连接,所有横梁与轨道平行设置,两个第一滚轮分别通过两个转轴与两个横梁转动连接,两个第一滚轮均与轨道的上表面滚动连接,连接部件与横梁的端部连接;夹紧机构与横梁连接。
11.作为一种优选,夹紧机构包括第二滚轮和两个夹紧部件,两个夹紧部件分别位于轨道的两侧,两个夹紧部件分别与两个横梁连接,第二滚轮的两端均与两个夹紧部件转动连接,第二滚轮与轨道的下表面滚动连接;松紧调节部件安装在夹紧部件。
12.作为一种优选,夹紧部件包括连接杆、第一套环、第二套环和倾斜连接板;第一套环固定在横梁,连接杆的一端与第一套环连接,第二套环与连接杆滑移连接;倾斜连接板的一端与横梁连接,倾斜连接板的另一端与第二套环连接;第二滚轮与倾斜连接板转动连接;松紧调节部件安装在连接杆,松紧调节部件的一端顶向第二套环用以推动第二套环向第一套环方向滑动。
13.作为一种优选,横梁、连接杆和倾斜连接杆三个围成一个三角形,连接杆和倾斜连接杆为三角形的短边,横梁为三角形的长边。
14.作为一种优选,松紧调节部件包括螺母和弹簧,连接杆的另一端设有螺纹段,螺母与螺纹段螺纹连接,弹簧套在连接杆,弹簧位于第二弹簧与螺母之间。
15.作为一种优选,连接部件包括固定杆和两个固定板,两个固定板分别与两个横梁的端部连接,另一端用于连接运输车;固定杆的两端分别与两个固定板连接;固定杆位于两个固定板之间。
16.作为一种优选,每两个竖向连接板之间通过横向连接板连接。
17.一种运输车,包括运输车本体和一种适用于电动单轨运输机的可遥控避障装置,避障装置与运输车本体运动方向的一端连接,或运输车本体的两端均与壁障装置连接。
18.作为一种优选,运输车本体包括电动运输车车身、控制器和电源,控制器和电源均安装在电动运输车车身,控制器与电源电性连接,电动运输车车身和控制器电性连接,电源和电动运输车车身电性连接,电源和控制器均与控制盒电性连接;两个固定板均与电动运输车车身连接。
19.总的说来,本发明具有如下优点:
20.1.本发明设计了自动避障功能,可在电动单轨运输机运行遇到障碍物时或电动单轨运输机离地间隙过低时停机,保护了轨道系统的安全以及电动单轨运输机本身的设备安全,减少了电动单轨运输机的维护成本。
21.2.本发明设计了新遥控系统,解决了目前带遥控功能的电动单轨运输机的实际遥控距离较短的问题,实现500米的遥控距离。
22.3.本发明设计了一种夹紧装置,方便该远程遥控自动避障装置从单轨轨道上拆卸与安装。同时可适应不同应用场合调整上下从动轮之间的夹紧力。
23.4.本发明采用了模块化设计,可以安装在电动单轨运输机的头部和尾部,达到双向的自动避障功能;同时,本发明可向下兼容普通的电动单轨运输机,使普通的电动单轨运输机也能实现遥控与避障功能。
附图说明
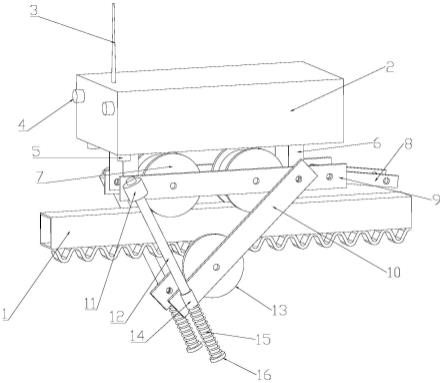
24.图1为一种适用于电动单轨运输机的可遥控避障装置的立体图。
25.图2为连接部件、松紧调节部件、运动机构和夹紧机构的装配示意图。
26.图3为一种运输车的主视图。
27.图4为本发明的控制盒电气接线图。
28.其中,1为轨道,2为控制盒,3为通讯天线,4为漫反射传感器,5为距离传感器,6为竖向连接板,7为第一滚轮,8为连接部件,9为横梁,10为倾斜连接板,11为第一套环,12为连接杆,13为第二滚轮,14为第二套环,15为弹簧,16为螺母,17为横向连接板,18为电缆,19为固定板,20为固定杆,21为电动运输车车身,22为控制器,23为电源。
具体实施方式
29.下面将结合具体实施方式来对本发明做进一步详细的说明。
30.实施例一
31.一种适用于电动单轨运输机的可遥控避障装置,避障装置与运输机连接,避障装置在轨道上移动;避障装置包括控制盒、通讯天线、漫反射传感器、距离传感器、连接部件、松紧调节部件、运动机构和夹紧机构;控制盒安装在运动机构上,运动机构的滚轮与轨道滚动连接,夹紧机构的滚轮与轨道滚动连接,夹紧机构与运动机构连接,运动机构位于轨道上方;连接部件与运动机构的端部连接用以连接运输机,松紧调节部件安装在夹紧机构用以调节夹紧机构和运动机构对轨道的压力;漫反射传感器安装在控制盒,漫反射传感器位于控制盒的前进方向上,距离传感器安装在控制盒,距离传感器位于控制盒的底部朝向地面设置;通讯天线与控制盒连接,控制盒与运输机电性连接。
32.运动机构包括竖向连接板、横梁、第一滚轮和转轴;竖向连接板的数量为四个,横梁的数量为两个,第一滚轮的数量为两个,转轴的数量为两个,控制盒为立方体结构;四个竖向连接板的一端分别与控制盒的四个边角连接,每两个竖向连接板的另一端与一个横梁的两端连接,所有横梁与轨道平行设置,两个第一滚轮分别通过两个转轴与两个横梁转动连接,两个第一滚轮均与轨道的上表面滚动连接,连接部件与横梁的端部连接;夹紧机构与横梁连接。
33.夹紧机构包括第二滚轮和两个夹紧部件,两个夹紧部件分别位于轨道的两侧,两个夹紧部件分别与两个横梁连接,第二滚轮的两端均与两个夹紧部件转动连接,第二滚轮与轨道的下表面滚动连接;松紧调节部件安装在夹紧部件。
34.夹紧部件包括连接杆、第一套环、第二套环和倾斜连接板;第一套环固定在横梁,连接杆的一端与第一套环连接,第二套环与连接杆滑移连接;倾斜连接板的一端与横梁连接,倾斜连接板的另一端与第二套环连接;第二滚轮与倾斜连接板转动连接;松紧调节部件安装在连接杆,松紧调节部件的一端顶向第二套环用以推动第二套环向第一套环方向滑动。
35.横梁、连接杆和倾斜连接杆三个围成一个三角形,连接杆和倾斜连接杆为三角形的短边,横梁为三角形的长边。
36.松紧调节部件包括螺母和弹簧,连接杆的另一端设有螺纹段,螺母与螺纹段螺纹连接,弹簧套在连接杆,弹簧位于第二弹簧与螺母之间。
37.连接部件包括固定杆和两个固定板,两个固定板分别与两个横梁的端部连接,另一端用于连接运输车;固定杆的两端分别与两个固定板连接;固定杆位于两个固定板之间。
38.每两个竖向连接板之间通过横向连接板连接。
39.本实施例中,竖向连接板、横向连接板、第一滚轮和第二滚轮均采用聚氨酯等耐磨塑料制备,从而减轻避障装置整体重量;连接杆、第一套环、第二套环、倾斜连接板、螺母和弹簧均采用轻型的合金材料,如铝合金。弹簧采用铝合金压缩弹簧。
40.本实施例的转轴与横梁通过限位螺母连接固定,第一滚轮与转轴转动连接,第二滚轮通过转轴与倾斜连接板转动连接,转轴与倾斜连接板通过螺母连接固定,第二滚轮与转轴转动连接。由于转轴与横梁、转轴与倾斜连接板都是通过螺母连接,因此在不同的轨道可以通过调节螺母锁紧位置调节两个横梁之间的距离、调节两个夹紧部件之间的距离,从而本发明的避障装置可以适用于不同的轨道。
41.本实施例的横梁、倾斜连接板、竖向连接板、横向连接板和固定板均为平板结构,便于加工。连接杆为圆柱形结构。
42.本实施例的倾斜连接板与横梁转动连接,倾斜连接板和横梁均设有转动孔,倾斜连接板和横梁通过转轴转动连接。
43.本实施例在调整第一滚轮和第二滚轮对轨道的压力时,即调整第一滚轮和第二滚轮对轨道的夹紧程度,通过旋动连接杆另一端的螺母,将压缩弹簧沿连接杆轴向滑移,从而推动压缩弹簧另一端的第二套环,从而带动倾斜连接板相对于横梁转动,调整第一滚轮和第二滚轮之间的距离,实现对轨道的夹紧。
44.通讯天线、漫反射传感器和距离传感器与控制盒信号连接。
45.本实施例的运输机为电动轨道运输机。漫反射传感器和距离传感器的数量均为两个,两个距离传感器均安装在同一平面,两个漫反射传感器均安装在同一平面。
46.控制盒包括电平转换装置,电平转换装置与通讯天线电性连接;电平转换装置与运输机电性连接,电平转换装置与距离传感器和漫反射传感器电性连接,电平转换装置接收电动轨道运输机电源的电能,将48v直流电转换成可供控制盒使用的5v直流电、可供距离传感器、漫反射传感器使用的15v直流电。控制盒还包括控制器,控制盒的控制器通过信号线接收距离传感器、漫反射传感器、通讯天线的传感信号,并根据预设的算法做出相应,将控制要求通过信号线经电缆传送至电动轨道运输机的控制器。
47.当漫反射传感器检测到前方或后方有异物时,发送停止信号到控制盒,控制盒做出反应,发送信号到电动轨道运输机的控制器,使整机停机,同时,控制器自锁防止电动轨道运输机误启动。当障碍物被排除后,通过天线通讯解除控制器的自锁程序,从而使得电动轨道运输机能继续运行。
48.距离传感器实时监测离地高度,当离地高度小于控制盒设定的阈值时,控制盒做出反应,发送信号到电动轨道运输机的控制器,使整机停机,同时,控制器自锁防止电动轨道运输机误启动。当障碍物被排除后,通过天线通讯解除控制器的自锁程序,从而使得电动
轨道运输机能继续运行。
49.本发明提供了一种适用于电动单轨运输机的可遥控避障装置。该装置可在轨道上便携拆装并调节与轨道间的夹紧压力,同时为普通电动单轨运输机增添了远程遥控与自动避障功能。
50.实施例二
51.一种运输车,包括运输车本体和一种适用于电动单轨运输机的可遥控避障装置,避障装置与运输车本体运动方向的一端连接,或运输车本体的两端均与壁障装置连接。
52.运输车本体包括电动运输车车身、控制器和电源,控制器和电源均安装在电动运输车车身,控制器与电源电性连接,电动运输车车身和控制器电性连接,电源和电动运输车车身电性连接,电源和控制器均与控制盒电性连接;两个固定板均与电动运输车车身连接。本实施例的控制盒和控制器通过电缆连接,控制盒和电源通过电缆连接。
53.本实施例未提及部分同实施例一。
54.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1