基于光截法的地铁轨道几何形位参数动态检测方法与流程
1.本发明涉及基于光截法的地铁轨道几何形位参数动态检测方法,属于地铁隧道钢轨动态检测技术领域。
背景技术:
2.随着地铁建设的发展,车辆运行的安全问题越来越受到人们的重视,同时对列车维护检修自动化要求也越来越高。为了列车正常安全的运行,需要提高列车的检修效率和质量。
3.随着城市公共交通运输需求的不断增大,近几年轨道交通作为主要的交通运输方式也正以飞快的速度向前发展。在人口密集的大城市,城市轨道交通在人们出行方式中都扮演着重要角色。但是,人们在享受城市轨道交通便利的同时也影响着车辆、轨道系统的健康状态。例如:早高峰和晚高峰时段长期的过载运行会损坏地铁车辆的主要运行部件;高寒地区环境温度变化较大,轨道会因温差而改变原来位置,恶化运营轨道的不平顺状态。随着城轨列车的飞速发展,对钢轨的可靠性运行提出了更高的要求,因此对地铁轨道几何形位参数的智能检测具有重大意义。
4.目前,轨道参数检测设备主要是对钢轨内部进行检测,由于地铁轨道具有复杂的道岔,在道岔附近因有护轨和尖轨等轨内设备的存在会影响测量结果,同时列车车轮与钢轨内侧长时间摩擦会导致钢轨内侧肥边、掉块等缺陷而影响轨道几何形位参数的检测。因此,现有方法不适用地铁复杂道岔的钢轨检测。
技术实现要素:
5.针对现有轨道参数检测方法不适用地铁复杂道岔钢轨检测的问题,本发明提供一种基于光截法的地铁轨道几何形位参数动态检测方法。
6.本发明的一种基于光截法的地铁轨道几何形位参数动态检测方法,包括,
7.在检测车的检测梁上对应每根钢轨位置设置内侧结构光源、内侧图像采集模块、外侧结构光源和外侧图像采集模块;
8.检测车在巡检作业过程中,使内侧结构光源照射范围覆盖钢轨的上表面和内侧表面,通过内侧图像采集模块采集包括钢轨上表面和内侧表面的内侧图像;同时使外侧结构光源照射范围覆盖钢轨的上表面和外侧表面,通过外侧图像采集模块采集包括钢轨上表面和外侧表面的外侧图像;
9.采用里程定位同步模块确定内侧图像采集模块的空间位置,再结合两根钢轨的内侧图像计算获得两根钢轨当前位置的初始轨距和初始轨底坡;
10.在初始轨距和初始轨底坡中至少有一个与标准数据偏差超过预设阈值时,采用里程定位同步模块确定外侧图像采集模块的空间位置,再结合两根钢轨的外侧图像对初始轨距和初始轨底坡进行修正,获得修正后轨距和修正后轨底坡。
11.根据本发明的基于光截法的地铁轨道几何形位参数动态检测方法,所述里程定位
同步模块采用车载轴头光电编码器对空间位置进行初步定位;再结合隧道内的里程标和通过地铁列控地面系统应答器获得的检测车位置,对初步定位结果进行动态修正,实现对空间位置的最终定位。
12.根据本发明的基于光截法的地铁轨道几何形位参数动态检测方法,里程定位同步模块在启动的同时向工控机发送触发信号,工控机根据触发信号控制内侧结构光源、内侧图像采集模块、外侧结构光源和外侧图像采集模块同步启动。
13.根据本发明的基于光截法的地铁轨道几何形位参数动态检测方法,内侧结构光源和外侧结构光源的组成结构相同;
14.内侧结构光源包括ld激光器和柱透镜;
15.ld激光器根据工控机的触发信号开始发射光束,所述光束通过柱透镜整形为扇型面照射在钢轨的上表面和内侧表面;ld激光器根据工控机的结束指令停止发射光束。
16.根据本发明的基于光截法的地铁轨道几何形位参数动态检测方法,ld激光器发射光束的波长与内侧图像采集模块和外侧图像采集模块的滤光片的中心波长相同。
17.根据本发明的基于光截法的地铁轨道几何形位参数动态检测方法,所述ld激光器发射光束的波长为915nm。
18.根据本发明的基于光截法的地铁轨道几何形位参数动态检测方法,内侧结构光源和外侧结构光源处于同一水平面上,每个结构光源的光束照射范围与对应的图像采集模块的拍摄范围相同。
19.根据本发明的基于光截法的地铁轨道几何形位参数动态检测方法,获得初始轨距和初始轨底坡的方法包括:
20.采用数据处理器根据内侧图像采集模块的空间位置、两根钢轨的内侧图像,基于光截法获取钢轨的初始表面轮廓;根据初始表面轮廓计算获得两根钢轨当前位置的初始轨距和初始轨底坡。
21.根据本发明的基于光截法的地铁轨道几何形位参数动态检测方法,获得修正后轨距和修正后轨底坡的方法包括:
22.在初始轨距和初始轨底坡中至少有一个与标准数据偏差超过预设阈值时,采用数据处理器根据外侧图像采集模块的空间位置、两根钢轨的外侧图像,基于光截法获取钢轨的修正轮廓;根据修正轮廓对初始轨距和初始轨底坡进行修正,获得修正后轨距和修正后轨底坡。
23.根据本发明的基于光截法的地铁轨道几何形位参数动态检测方法,初始表面轮廓的获得方法包括:
24.基于光学三角原理,根据光源光线的形变规律,由内侧图像解调出钢轨上表面和内侧表面的三维信息,作为内侧图像。
25.修正轮廓的获得方法包括:
26.基于光学三角原理,根据光源光线的形变规律,由外侧图像解调出钢轨上表面和外侧表面的三维信息,作为外侧图像。
27.本发明的有益效果:本发明方法通过在检测车的检测梁上安装结构光源模块和图像采集模块,在检测车巡检作业时,通过里程定位同步模块控制系统在隧道内特定区间或全线路采集两条钢轨的轮廓图像,经过图像分析和数据处理可获得轨距和轨底坡数据。
28.本发明方法具有测量精度高、测量速度快,对地铁复杂道岔钢轨检测适应型强的优势,可计算地铁每一区间内的钢轨几何形位参数偏差值,为分析钢轨几何形位参数偏差的应用规律,地铁钢轨线路的状态提供有力数据支撑,避免因钢轨偏移造成列车脱轨事故的发生。
29.本发明方法适用钢轨内侧被设备遮挡或钢轨内侧严重磨耗时,内侧测量数据出现巨大偏差,应用轨外侧的钢轨断面数据对轨距和轨底坡进一步修正。
30.本发明方法省去繁琐的标定过程,可准确、快速的检测出钢轨的轨距、轨底坡和钢轨断面,进而获得对应里程的钢轨几何参数偏差值。本发明方法具有通用性,尤其适用地铁复杂道岔的钢轨检测。
31.在本发明方法获得地铁轨道几何形位参数数据不断丰富的情况下,还可以根据线路不同位置钢轨的断面信息对于特定位置的钢轨断面进行智能预测,并且随时间推移不断的修正预测结果,为工作人员建立预警机制,从而提高铁路运行的安全性。
附图说明
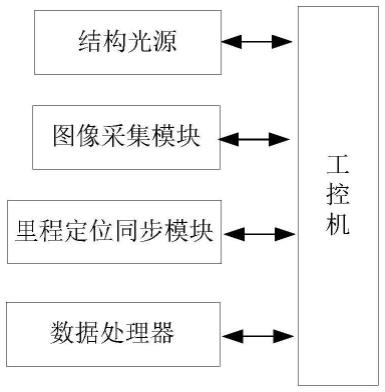
32.图1是本发明所述基于光截法的地铁轨道几何形位参数动态检测方法的流程框图;
33.图2是对钢轨进行图像采集的示意图;图中11为外侧结构光源,12为内侧结构光源,21为外侧图像采集模块,22为内侧图像采集模块;
34.图3是图2的主视图。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
36.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
37.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
38.具体实施方式一、结合图1至图3所示,本发明提供了一种基于光截法的地铁轨道几何形位参数动态检测方法,包括,
39.在检测车的检测梁上对应每根钢轨位置设置内侧结构光源、内侧图像采集模块、外侧结构光源和外侧图像采集模块;
40.检测车在巡检作业过程中,使内侧结构光源照射范围覆盖钢轨的上表面和内侧表面,通过内侧图像采集模块采集包括钢轨上表面和内侧表面的内侧图像;同时使外侧结构光源照射范围覆盖钢轨的上表面和外侧表面,通过外侧图像采集模块采集包括钢轨上表面和外侧表面的外侧图像;
41.采用里程定位同步模块确定内侧图像采集模块的空间位置,再结合两根钢轨的内侧图像计算获得两根钢轨当前位置的初始轨距和初始轨底坡;
42.在初始轨距和初始轨底坡中至少有一个与标准数据偏差超过预设阈值时,采用里
程定位同步模块确定外侧图像采集模块的空间位置,再结合两根钢轨的外侧图像对初始轨距和初始轨底坡进行修正,获得修正后轨距和修正后轨底坡。
43.本实施方式结合对钢轨空间位置的定位确定钢轨断面图像,根据内侧图像和图像采集模块在转向架架构上的空间安装位置定位钢轨的轨距和轨底坡。对于钢轨内侧被设备遮挡或钢轨内部严重磨耗时,应用轨外的钢轨断面数据对轨距和轨底坡进一步修正。
44.图像采集模块由面阵coms工业相机、滤光片和镜头组成。用于在接收到拍摄命令后,采集钢轨轮廓图像,且对于同一钢轨采集连续多张钢轨轮廓图像;可将钢轨图像发送至工控机。
45.每个结构光源和对应的图像采集模块构成一组成像模块,本实施方式中共有四组成像模块。结构光源和对应的图像采集模块位于钢轨的侧上方安装在检测车的检测梁上。
46.本实施方式还可以包括供电模块,用于为各组件提供供电电源。供电模块安装在检测车内机柜内,可远程控制工控机、结构光源、图像采集模块、数据处理器、里程定位同步模块的供电和大量数据传输。集成了工业级电源、智能pdu、控制电路,工业级网络交换器等设备。
47.进一步,所述里程定位同步模块采用车载轴头光电编码器对空间位置进行初步定位;再结合识别隧道内的里程标和读取地铁列控地面系统应答器获得的检测车位置信息,对隧道纵向里程的初步定位结果进行动态修正,实现对空间位置的最终定位。可减少和消除编码器累计误差,实现隧道纵向里程厘米级定位。
48.所述里程定位同步模块包括射频标签阅读器、轴头光电编码器、控制电路等。
49.再进一步,里程定位同步模块在启动的同时向工控机发送触发信号,工控机根据触发信号控制内侧结构光源、内侧图像采集模块、外侧结构光源和外侧图像采集模块同步启动。
50.再进一步,内侧结构光源和外侧结构光源的组成结构相同;
51.内侧结构光源包括ld激光器和柱透镜;
52.ld激光器根据工控机的触发信号开始发射光束,所述光束通过柱透镜整形为扇型面照射在钢轨的上表面和内侧表面;ld激光器根据工控机的结束指令停止发射光束。
53.扇型面光源照射在铁轨的表面时,会在钢轨表面形成一条具有一定宽度的光带,而钢轨表面在光平面的截面几何信息包含在此光带中。当成像系统获取到这条光带的图像后,再经过后续的处理和计算,就可获得钢轨的截面几何尺寸。
54.ld激光器发射光束的波长与内侧图像采集模块和外侧图像采集模块的滤光片的中心波长相同。
55.作为示例,所述ld激光器发射光束的波长为915nm。
56.结合图2和图3所示,内侧结构光源和外侧结构光源处于同一水平面上,每个结构光源的光束照射范围与对应的图像采集模块的拍摄范围相同。结构光源直射钢轨纵面,图像采集模块与结构光源水平安装。
57.再进一步,获得初始轨距和初始轨底坡的方法包括:
58.采用数据处理器根据内侧图像采集模块的空间位置、两根钢轨的内侧图像,基于光截法获取钢轨的初始表面轮廓;根据初始表面轮廓计算获得两根钢轨当前位置的初始轨距和初始轨底坡。
59.将里程定位同步模块获取的数据与数据处理器计算获得的数据进行结合,可建立精准的融合定位的数字模型,可解决地铁轨道几何形位动态检测中历史病害数据精准匹配问题,使其数据具有可追溯性。
60.数据处理器可与工控机实时通信,在分析图像数据的同时,对数据进行存储管理。
61.获得修正后轨距和修正后轨底坡的方法包括:
62.在初始轨距和初始轨底坡中至少有一个与标准数据偏差超过预设阈值时,采用数据处理器根据外侧图像采集模块的空间位置、两根钢轨的外侧图像,基于光截法获取钢轨的修正轮廓;根据修正轮廓对初始轨距和初始轨底坡进行修正,获得修正后轨距和修正后轨底坡。
63.再进一步,初始表面轮廓的获得方法包括:
64.基于光学三角原理,根据光源光线的形变规律,由内侧图像解调出钢轨上表面和内侧表面的三维信息,作为内侧图像。
65.修正轮廓的获得方法包括:
66.基于光学三角原理,根据光源光线的形变规律,由外侧图像解调出钢轨上表面和外侧表面的三维信息,作为外侧图像。
67.本发明方法在具体实施中的流程如下:
68.步骤一、当列车驶入检测区域时,工控机第一次接收到里程定位同步模块的触发信号,工控机采集到触发信号后,发送到结构光源、图像采集模块。
69.步骤二、结构光源接收工控机发送的第一次触发信号时,开始投光。
70.步骤三、图像采集模块在接收到工控机发出的第一次触发信号,分别开始连续采集钢轨两侧轮廓图像信息。
71.步骤四、当列车继续行驶,驶离检测区域时,里程定位同步模块再次发送触发信息,将其传送至工控机。
72.步骤五、工控机第二次采集到触发信号,发送到结构光源和图像采集模块;
73.步骤六,结构光源和图像采集模块接收到第二次触发信号,结构光源结束投光,图像采集模块图像采集结束,并将采集到的钢轨两侧的数据发送到工控机。
74.具体实施例:将结构光源作为图像采集模块的补偿光源。
75.工控机具体的拟合算法是:将结构光测量法与空间坐标变换法相结合;结构光测量法是将光线投射到被测物上,以光学三角原理为基础,根据光线产生的形变,解调出被测物的三维信息;坐标变换法是指将世界坐标系、相机坐标系、图像平面坐标系转换成工控机内部数字图像所用的坐标系,通过坐标变换,将所有坐标系下的数据变换到工控机坐标系中,利有工控机程序计算钢轨的轨距及轨底坡。
76.将由内侧获取的钢轨断面内侧图像转换为空间内实际坐标值计算钢轨的初始轨距和初始轨底坡;将由外侧获取的钢轨断面外侧图像像转换为空间内实际坐标值,对出现巨大偏差的初始轨距和初始轨底坡进一步修正,具体如下:
77.一:对采集的两个内侧图像,确定其相对于钢轨轨面以下16mm处的空间坐标值以及钢轨底部的空间坐标值;由此通过两测量点的水平距离计算钢轨内轨距值以及计算钢轨轨底坡值。
78.二:当轨道内侧计算的轨距值、轨底坡数据与标准数据偏差较大或无数据时,采用
采集的两个外侧图像计算外轨距值和轨底坡值;正常情况下,外轨距值减去两钢轨的厚度即为内轨距值;若出现偏差,则采用外侧图像对应的数据对内轨距值进行修正,保证地铁轨道几何形位参数动态检测数据连续。
79.本发明方法对采集的图像数据经过图像分析、匹配和立体视觉获得钢轨底部两侧坐标,通过空间距离公式求出轨底坡数据;与先保存在数据库内的轨底坡数据进行比较,计算出轨底坡差值。通过空间距离公式求出轨距点之间的距离,即为轨距值;与先保存在数据库内的标准轨距数据进行比较,计算出轨道间距偏差,对异常信息进行报警。
80.虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其它所述实施例中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1