一种有砟轨道道床断面扫描检测系统的制作方法
1.本发明涉及一种有砟轨道道床断面扫描检测系统。
背景技术:
2.我国铁路事业的发展,列车行驶速度不断提高,车辆运行的安全问题越来越受到人们的重视,同时对列车维护检修自动化要求也越来越高,为了列车正常安全的运行,需要提高列车的检修效率和质量。在有砟轨道铺轨施工中,涉及多遍数的起道上砟以及后期整道补砟作业,每次上砟的部位、方量较难控制,目前主要利用设计标准断面先计算一段区域的总上砟量,然后由经验丰富的线路工沿线观察线路情况,再决定该区域段上砟部位。目前多数施工项目在道砟量上存在亏方情况,道砟道床的断面情况对上砟施工能够提供有效的参考。
3.现有技术中,有砟轨道道床的几何尺寸如道床高程、砟肩高程、坡度等指标的测量、检测,没有自动道床断面扫描检测系统,主要是依靠专业技术人员使用卷尺来测量。这种方法只能检测一个点,代表性不强,不能同时检测道床轮廓线、面,无法直观、客观的检测整体平整度。而且这种方法对从事检测的人员要求较高,检测工序合格率低,不能精确、快速地检测断面。因此急需一种可以适应在轨道上稳定行走的碎石道床断面扫描用车。
技术实现要素:
4.本发明的目的是为了解决目前还没有一种针对砟轨道道床的几何尺寸的自动道床断面扫描检测系统,从而存在浪费人力、检测精度差、效率低的问题,而提出一种有砟轨道道床断面扫描检测系统。
5.砟轨道道床的几何尺寸,如道床高程、砟肩高程、坡度等指标;
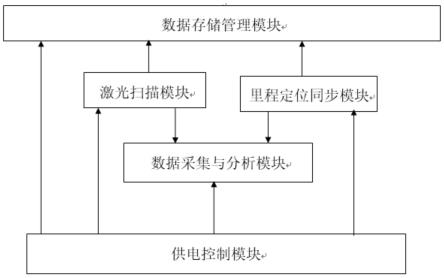
6.一种有砟轨道道床断面扫描检测系统包括激光扫描模块、数据采集与分析模块、里程定位同步模块、数据存储管理模块和供电控制模块;
7.激光扫描模块用于对有砟轨道道床断面扫描,获取道床断面点云数据;
8.里程定位同步模块用于对道床断面点云数据进行里程定位;
9.数据采集与分析模块用于采集激光扫描模块获取的道床断面点云数据,对道床断面点云数据进行处理,得到目标点云,根据轨枕与道床的位置信息对目标点云进行处理分别获取轨枕与道床的断面轮廓投影图;
10.根据轨枕与道床的断面轮廓投影图,拟合出断面轮廓投影图所有轮廓线;
11.数据采集与分析模块用于采集里程定位同步模块获取的里程定位;
12.数据存储管理模块用于存储数据采集与分析模块获取的数据和里程定位同步模块获取的里程数据。
13.供电控制模块用于为激光扫描模块、数据采集与分析模块、里程定位同步模块、数据存储管理模块供电。
14.优选地,里程定位同步模块由射频标签阅读器、轴头光电编码器、控制电路组成。
15.优选地,射频标签阅读器读取检测车的列车运行系统tax信息。
16.优选地,轴头光电编码器安装在检测车的轮对轴头,光电编码器输出脉冲信号,对工程车行驶纵向里程初步定位。
17.优选地,里程定位同步模块通过读取的tax信息,对工程车在铁轨区间的里程信息进行动态修正。
18.优选地,数据采集与分析模块用于采集激光扫描模块获取的道床断面点云数据,对道床断面点云数据进行处理,得到目标点云,根据轨枕与道床的位置信息对目标点云进行处理分别获取轨枕与道床的断面轮廓投影图;根据轨枕与道床的断面轮廓投影图,拟合出断面轮廓投影图所有轮廓线;具体过程为:
19.数据采集与分析模块用于采集激光扫描模块获取的道床断面点云数据,对道床断面点云数据进行点云去噪、点云配准、点云抽稀、点云切片、点云拼接以及强度距离修正,得到目标点云,根据轨枕与道床的位置信息对目标点云进行分割、降维、方向矫正处理分别获取轨枕与道床的断面轮廓投影图;
20.根据轨枕与道床的断面轮廓投影图,采取区域、分段直线拟合算法拟合出断面轮廓投影图所有轮廓线;
21.其中,直线拟合算法为最小二乘法、梯度下降法或高斯牛顿算法。
22.优选地,点云去噪采用中值滤波、高斯滤波或双边滤波算法;
23.点云抽稀采用比例压缩、最小距离、随机采样或八叉树压缩算法;
24.点云切片采用基于几何模型拟合的分割算法、基于区域生长的分割算法或基于特征聚类的分割算法。
25.优选地,数据采集与分析模块采集激光扫描模块的数据和里程定位同步模块的里程定位信息,计算砟石盈欠数据、轨枕埋深、砟肩宽度、砟肩堆高、边坡坡度、道床顶面宽度数据,并对道床病害识别;具体过程为:
26.砟石盈欠数据的统计采用积分计算,即分别建立道床标准断面点云数据的线性方程、道床实测断面点云数据的线性方程,以道床实测断面点云数据的线性方程的起点和终点为积分起止点,根据道床标准断面点云数据与道床实测断面点云数据的差值进行累加积分运算,得到砟石盈剖面欠面积;
27.再通过里程定位同步模块的距离信息便可得到当前位置的砟石盈欠数据;
28.采用凸包算法定位砟肩位置,计算出砟肩宽度、堆高;
29.采用直线检测算法定位边坡与道床顶面位置,计算出边坡坡度、道床顶面宽度;
30.直线检测算法为hough直线检测、radon直线检测或freeman直线检测算法;
31.标准轨枕距钢轨顶面的距离为定值,计算砟石表面距钢轨顶面距离;计算两个距离差,即为轨枕埋深;
32.两个距离差为标准轨枕距钢轨顶面距离与砟石表面距钢轨顶面距离的差。
33.优选地,激光扫描模块为2组激光扫描仪安装在钢轨正上方,固定在检测车转向架架构上或车厢地板下,视觉场覆盖整个道床,检测车运行时扫描道床数据信息。
34.优选地,供电控制模块安装在车内机柜内,可远程控制数据采集与分析模块、激光扫描模块、里程定位同步模块、数据存储管理模块的供电。
35.本发明的有益效果:
36.本发明旨在通过对激光扫描模块对有砟道床断面扫描,提供准确、可量化的有砟轨道道床断面缺陷数据和盈/欠砟量数据,并对有砟轨道道床病害识别,轨枕埋深、砟肩宽度、砟肩堆高、边坡坡度、道床顶面宽度。里程定位同步模块对道床断面数据加以里程定位信息,使其数据具有可追溯性,实现道床断面在线检测的智能化,节省人力,提高检测精度和效率。
37.本发明公开一种有砟轨道道床断面扫描检测系统,该系统包括数据采集与分析服务器、激光扫描模块、里程定位同步模块、数据存储管理模块、数据采集与分析模块和供电控制模块。本发明通过对激光扫描模块对有砟道床断面扫描,提供准确、可量化的有砟轨道道床断面缺陷数据和盈/欠砟量数据,并对有砟轨道道床病害识别,轨枕埋深、砟肩宽度、砟肩堆高、边坡坡度、道床顶面宽度。里程定位同步模块对道床断面数据加以里程定位信息,使其数据具有可追溯性,实现道床断面在线检测的智能化,节省人力,提高检测精度和效率。
38.该系统综合利用激光扫描仪、图像识别、人工智能等技术,在检测车运行过程中,动态自动完成有砟轨道道床断面数据采集和故障智能分析,并对异常状况进行报警提示。
39.1、本发明通过激光扫描模块对有砟道床断面扫描,可直观展示道床断面;
40.2、可量化的有砟轨道道床断面缺陷数据和盈/欠砟量数据;
41.3、可识别有砟轨道道床病害识别,轨枕埋深、砟肩宽度、砟肩堆高、边坡坡度、道床顶面宽度;
42.4、里程定位同步模块对道床断面数据加以里程定位信息,使其数据具有可追溯性;
43.5、当数据不断丰富,数据采集与分析模块还可以根据不同维度(地域、天气、季节)对于特定位置的道砟进行智能预测,并且随时间推移不断的修正预测结果,给予运用人员形成一个重要的预警机制,以提高生产的安全性。
附图说明
44.图1为本发明一种有砟轨道道床断面扫描检测系统结构示意图;
45.图2为道床断面示意图;
46.图3为激光扫描模块布置示意图;
47.图4为一种有砟轨道道床断面扫描检测系统激光扫描模块与道床位置空间示意图;
48.图5为一种有砟轨道道床断面扫描检测系统扫描道床数据示意图;
49.图6为激光扫描模块三维建模图。
具体实施方式
50.需要特别说明的是,在不冲突的情况下,本技术公开的各个实施方式之间可以相互组合。
51.具体实施方式一:结合图1说明本实施方式,本实施方式一种有砟轨道道床断面扫描检测系统包括激光扫描模块、数据采集与分析模块、里程定位同步模块、数据存储管理模块和供电控制模块;
52.激光扫描模块用于对有砟轨道道床断面扫描,获取道床断面点云数据;
53.里程定位同步模块用于对道床断面点云数据进行里程定位;
54.数据采集与分析模块用于采集激光扫描模块获取的道床断面点云数据,对道床断面点云数据进行处理,得到目标点云,根据轨枕与道床的位置信息对目标点云进行处理分别获取轨枕与道床的断面轮廓投影图;
55.根据轨枕与道床的断面轮廓投影图,拟合出断面轮廓投影图所有轮廓线;
56.数据采集与分析模块用于采集里程定位同步模块获取的里程定位;
57.数据存储管理模块用于存储数据采集与分析模块获取的数据和里程定位同步模块获取的里程数据。
58.供电控制模块用于为激光扫描模块、数据采集与分析模块、里程定位同步模块、数据存储管理模块供电。
59.具体实施方式二:本实施方式与具体实施方式一不同的是,里程定位同步模块由射频标签阅读器、轴头光电编码器、控制电路等组成。
60.其它步骤及参数与具体实施方式一相同。
61.具体实施方式三:本实施方式与具体实施方式一或二不同的是,射频标签阅读器读取检测车的列车运行系统tax信息。
62.其它步骤及参数与具体实施方式一或二相同。
63.具体实施方式四:本实施方式与具体实施方式一至三之一不同的是,轴头光电编码器安装在检测车的轮对轴头,光电编码器输出脉冲信号,对工程车行驶纵向里程初步定位。
64.其它步骤及参数与具体实施方式一至三之一相同。
65.具体实施方式五:本实施方式与具体实施方式一至四之一不同的是,里程定位同步模块通过读取的tax信息,对工程车在铁轨区间的里程信息进行动态修正,减少和消除编码器累计误差,能够实现隧道纵向里程厘米级定位。
66.其它步骤及参数与具体实施方式一至四之一相同。
67.具体实施方式六:本实施方式与具体实施方式一至五之一不同的是,数据采集与分析模块用于采集激光扫描模块获取的道床断面点云数据,对道床断面点云数据进行处理,得到目标点云,根据轨枕与道床的位置信息对目标点云进行处理分别获取轨枕与道床的断面轮廓投影图;根据轨枕与道床的断面轮廓投影图,拟合出断面轮廓投影图所有轮廓线;具体过程为:
68.数据采集与分析模块用于采集激光扫描模块获取的道床断面点云数据,对道床断面点云数据进行点云去噪、点云配准、点云抽稀、点云切片、点云拼接以及强度距离修正等算法处理点云数据(在三维激光扫描模块扫描道床断面的过程中,会受到扫描设备、周围环境、砟石表面特性等影响,使得获取的点云数据存在一些噪点,数据无法正确表达道床的空间位置。)
69.首先,对获取的点云去噪处理,采用高斯滤波,对道床断面区域内数据加权平均,去除噪声数据。
70.点云配准,本发明使用多个三维激光扫描模块需要数据拼接和坐标纠正。三维激光扫描模块扫描数据都有各自的坐标系统,点云匹配把不同三维激光扫描模块扫描数据纠
正到统一的坐标系下。
71.对采集的数据进行点云抽稀、点云切片、点云拼接以及强度距离修正,由于三维激光扫描模块扫描轨道道床的数据量较大,其中一部分数据对于后期建模用处不大,在满足精度以及有砟道床几何特征的前提下,对数据进行精简。),得到高质量、低干扰的目标点云,根据轨枕与道床的位置信息对目标点云进行分割、降维、方向矫正处理分别获取轨枕与道床的断面轮廓投影图(轨枕在道床中的位置时固定的,三位激光扫描模块通过扫描的图像可获取轨枕和道床断面的轮廓图,如图6,在轨枕处分割即得到轨枕处的轮廓图,在轨枕以外分割即得到道床断面的轮廓图);
72.根据轨枕与道床的断面轮廓投影图,采取区域、分段直线拟合算法拟合出断面轮廓投影图所有轮廓线;
73.其中,直线拟合算法为最小二乘法、梯度下降法或高斯牛顿算法。
74.其它步骤及参数与具体实施方式一至五之一相同。
75.具体实施方式七:本实施方式与具体实施方式一至六之一不同的是,点云去噪采用中值滤波、高斯滤波或双边滤波等算法;
76.点云抽稀采用比例压缩、最小距离、随机采样或八叉树压缩等算法;
77.点云切片采用基于几何模型拟合的分割算法、基于区域生长的分割算法或基于特征聚类的分割算法。
78.其它步骤及参数与具体实施方式一至六之一相同。
79.具体实施方式八:本实施方式与具体实施方式一至七之一不同的是,数据采集与分析模块采集激光扫描模块的数据和里程定位同步模块的里程定位信息,计算砟石盈欠数据、轨枕埋深、砟肩宽度、砟肩堆高、边坡坡度、道床顶面宽度等数据,并对道床病害识别;具体过程为:
80.砟石盈欠数据的统计采用积分计算,即分别建立道床标准断面点云数据(对激光扫描模块获得的点云数据进行点云去噪、点云配准、点云抽稀、点云切片、点云拼接以及强度距离修正后点云数据为道床标准断面点云数据)的线性方程、道床实测断面点云数据(激光扫描模块获得)的线性方程,以道床实测断面点云数据的线性方程的起点和终点(方程的起点为钢轨的顶面,终点为道床的三位扫描模块扫面道床的边缘点)为积分起止点,根据道床标准断面点云数据与道床实测断面点云数据的差值进行累加积分运算,得到砟石盈剖面欠面积(盈与欠都与标准道床断面相比较,高于标准断面曲线称为盈,低于标准曲线称为欠),再通过里程定位同步模块的距离信息便可得到当前位置的砟石盈欠数据(砟石盈剖面欠面积,与列车移动的位置的积分,得到体积信息即砟石盈欠数据);
81.采用凸包算法定位砟肩位置,计算出砟肩宽度、堆高;
82.采用直线检测算法定位边坡与道床顶面位置,计算出边坡坡度、道床顶面宽度;
83.直线检测算法为hough直线检测、radon直线检测或freeman直线检测算法等;
84.标准轨枕距钢轨顶面的距离为定值,计算砟石表面距钢轨顶面距离;计算两个距离差,即为轨枕埋深;
85.两个距离差为标准轨枕距钢轨顶面距离与砟石表面距钢轨顶面距离的差。
86.数据采集与分析模块,通过激光扫描模块获取到的道床的数据,如图5所示,数据采集与分析模块提取道床数据以两条钢轨顶面为基准,钢轨顶面距离轨枕木的距离为定
值,砟石表面距钢轨顶面为变量,通过以人工智能领域深度学习算法根据激光扫描模块获取的数据与钢轨顶面距枕木的距离定位到轨枕及道床位置)。
87.本发明将里程定位模块同步获取的数据与数据采集与分析模块获取的数据进行结合,建立了精准的融合定位的数字模型,解决了动态检测中历史病害数据精准匹配问题,使其数据具有可追溯性。
88.其它步骤及参数与具体实施方式一至七之一相同。
89.具体实施方式九:本实施方式与具体实施方式一至八之一不同的是,激光扫描模块为2组激光扫描仪安装在钢轨正上方,固定在检测车转向架架构上或车厢地板下,视觉场覆盖整个道床,检测车运行时扫描道床数据信息。
90.其它步骤及参数与具体实施方式一至八之一相同。
91.具体实施方式十:本实施方式与具体实施方式一至九之一不同的是,供电控制模块安装在车内机柜内,可远程控制数据采集与分析模块、激光扫描模块、里程定位同步模块、数据存储管理模块的供电。
92.集成了工业级电源、智能pdu、控制电路,工业级网络交换器等设备。
93.其它步骤及参数与具体实施方式一至九之一相同。
94.本发明的上述算例仅为详细地说明本发明的计算模型和计算流程,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1