一种虚拟编组列车站台精确停车的间距优化方法及系统与流程
本公开涉及轨道交通、虚拟编组、精确停车以及安全防护调车,尤其涉及一种虚拟编组列车站台精确停车的间距优化方法及系统。
背景技术:
1、随着城市轨道交通路网规模不断扩大,客流时空分布不均的问题日益凸显,灵活编组结合开行方案的优化能够有效提升运力运量的精准匹配度。虚拟编组作为灵活编组的一种形式,不再受限于物理车钩,能够更加快速的响应运力调整需求。其中虚拟编组列车中的多个列车单元,通常需要按照同一个行车计划在车站同步精确停车,方可最大限度的提升线路容量。若按照传统的列车安全防护系统的速度-距离三阶段安全防护模型及安全假设条件,当多列车在车站同步精确停车时,列车单元间的停车间隔较大(以a型车参数为例,停车间隔将大于两个站台屏蔽门的间距),由此带来的站台长度设计成本将增多,或者损失掉部分车厢车门的乘降能力。
技术实现思路
1、本公开针对以上问题,提供了一种虚拟编组列车站台精确停车的间距优化方法及系统,基于界定虚拟编组列车站台精确停车场景的基本假设;构建虚拟编组列车站台精确停车的安全防护模型,求解精确停车间隔的关键因素并进行优化;以及明确面向虚拟编组列车站台精确停车场景的安全防护方法的安全约束,使得虚拟编组列车在车站精确场景下能够较近距离停车,精确停车间隔能够有效缩短,从而有效提高站台及列车利用率。
2、根据本公开的第一方面,提供了一种虚拟编组列车站台精确停车的间距优化方法,包括:
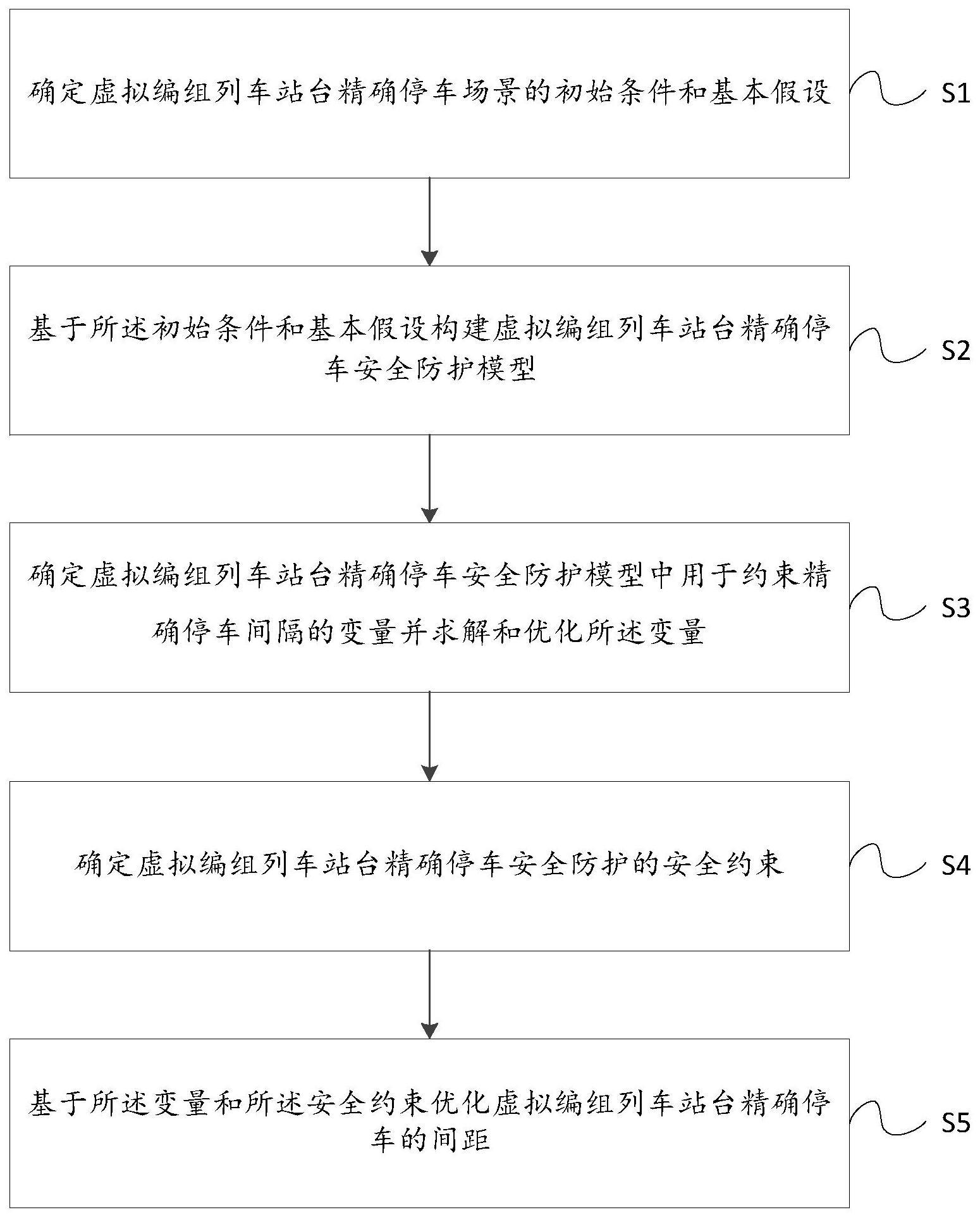
3、确定虚拟编组列车站台精确停车场景的初始条件和基本假设;
4、基于所述初始条件和基本假设构建虚拟编组列车站台精确停车安全防护模型;
5、确定虚拟编组列车站台精确停车安全防护模型中用于约束精确停车间隔的变量并求解和优化所述变量;
6、确定虚拟编组列车站台精确停车安全防护的安全约束;
7、基于所述变量和所述安全约束优化虚拟编组列车站台精确停车的间距。
8、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述确定虚拟编组列车站台精确停车场景的初始条件和基本假设包括:
9、所述初始条件包括虚拟编组列车中的每个列车单元的车门到车尖距离x、车站屏蔽门的间隔y、虚拟编组列车的列车单元间的最小安全防护间隔sm以及虚拟编组列车中的跟随列车单元在停车点精确停车时所需的停车点到移动授权终点的距离xoff;
10、所述基本假设包括车站屏蔽门是等间隔以及虚拟编组列车的列车单元间停车间隔要大于虚拟编组列车的列车单元间的最小安全防护间隔;
11、由虚拟编组列车站台精确停车场景的初始条件和基本假设,获得虚拟编组列车单元间的目标停车间隔d表示为式(1)为:
12、d=roundup((2x+sm+xoff)/y)×y-2x (1);
13、其中,距离x、y为工程实施过程确定的固定参数。
14、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述基于所述初始条件和基本假设构建虚拟编组列车站台精确停车安全防护模型包括:
15、当处于前车运动区间时,前车运动时,两车相对移动,此时虚拟编组列车站台精确停车安全防护模型为撞软墙防护模型;
16、当处牵扯停车区间时,前车刚停车时刻,后车速度为v′,此时虚拟编组列车站台精确停车安全防护模型为硬墙防护模型,基于硬墙防护模型计算停车位置在前车车尾位置后或者在前车车尾位置后的回撤一个虚拟编组列车的列车单元间的最小安全防护间隔对应的距离。
17、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述确定虚拟编组列车站台精确停车安全防护模型中用于约束精确停车间隔的变量并求解和优化所述变量包括:
18、确定虚拟编组列车站台精确停车安全防护模型中用于约束精确停车间隔的变量为列车间的最小安全防护间隔sm,以及跟随列车单元在停车点精确停车时所需的停车点到移动授权终点的距离xoff;
19、求解列车间的最小安全防护间隔sm,以及跟随列车单元在停车点精确停车时所需的停车点到移动授权终点的距离xoff,包括:
20、(1)求解虚拟编组列车的列车单元间的最小安全防护间隔sm:由虚拟编组列车单元中的前车决定虚拟编组列车的列车单元间的最小安全防护间隔sm,表示为式(2):
21、sm=max(sback,sslid)
22、其中,虚拟编组列车的前车的最小安全防护间隔sm包含列车后溜的距离sback以及列车主动退行防护的距离sslid;所述列车主动退行通过操作规程进行限制,所述限制为:若前车出现停车精度不满足要求的情况,待整列虚拟编组列车停稳后,开展退行对标的操作;
23、(2)求解跟随列车单元在停车点精确停车时所需的停车点到移动授权终点的距离xoff:设定初始加速度为一次制动率a,坡度加速度为r,列车紧急制动率为be,则三个阶段的加速度分别如式(3)-(5)为:
24、a1=a-r (3);
25、a2=r (4);
26、a3=be+r (5);
27、由此,根据几何约束条件可知式(6):
28、
29、其中,l表示候车期望目标停车点与最终停车位置pp的距离;v′为后车速度;a为列车速度由后车速度v降低为0的时间段内ato目标制动曲线上的走行距离,v0’表示候车期望目标停车点处候车在紧急制动触发线上的速度,a3表示制动阶段后车的加速度;并且其中:
30、
31、
32、其中,t0表示惰行时间,t1表示制动时间,a1表示切除牵引阶段的后车加速度,a2表示惰行阶段的后车加速度,a3表示制动阶段后车的加速度;由上述等式可推导得出:
33、
34、在此基础上,引入列车不触发紧急制动的条件:
35、
36、
37、对称轴为:
38、
39、函数y在对称轴x处取得最大值,要保证y在v0处小于零,此时求解得:
40、
41、(3)优化列车间的最小安全防护间隔sm,以及跟随列车单元在停车点精确停车时所需的停车点到移动授权终点的距离xoff,包括:
42、a.省略牵引阶段,仅使用惰行和制动完成精确停车;
43、b.跟随列车的一次制动率小于领车;
44、c.缩小在撞硬墙阶段的跟随列车单元在停车点精确停车时所需的停车点到移动授权终点的距离voff。
45、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述确定虚拟编组列车站台精确停车安全防护的安全约束包括:
46、控制虚拟编组的多个列车单元协同退行;
47、控制虚拟编组中的跟随列车单元在预设的速度阈值之下,跟随列车的ato控制单元限制使用牵引,而使用惰行和制动调节两阶段完成精确停车。
48、如上所述的方面和任一可能的实现方式,进一步提供一种实现方式,所述确定虚拟编组列车站台精确停车安全防护的安全约束还包括:在所述虚拟编组列车上装设高精度传感器及控制器。
49、根据本公开的第二方面,提供了一种虚拟编组列车站台精确停车的间距优化系统,包括:
50、条件模块,用于确定虚拟编组列车站台精确停车场景的初始条件和基本假设;
51、模型建立模块,用于基于所述初始条件和基本假设构建虚拟编组列车站台精确停车安全防护模型;
52、解算模块,用于确定虚拟编组列车站台精确停车安全防护模型中用于约束精确停车间隔的变量并求解和优化所述变量;
53、安全约束模块,用于确定虚拟编组列车站台精确停车安全防护的安全约束;
54、间距优化模块,用于基于所述变量和所述安全约束优化虚拟编组列车站台精确停车的间距。
55、根据本公开的第三方面,提供了一种虚拟编组列车,包括第二方面所述的虚拟编组列车站台精确停车的间距优化系统。
56、根据本公开的第四方面,提供一种电子设备,包括处理器和存储器,所述存储器存储有多条指令,所述处理器用于读取所述指令并执行如第一方面所述的方法。
57、根据本公开的第五方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有多条指令,所述多条指令可被处理器读取并执行如第一方面所述的方法。
58、本发明的有益效果:
59、基于目标停车点确定方法、系统、电子设备以及计算机可读存储介质,取得了如下有益效果:
60、(1)基于界定虚拟编组列车站台精确停车场景的基本假设;构建虚拟编组列车站台精确停车的安全防护模型,求解精确停车间隔的关键因素并进行优化;以及明确面向虚拟编组列车站台精确停车场景的安全防护方法的安全约束,使得虚拟编组列车在车站精确场景下能够较近距离停车,精确停车间隔能够有效缩短,从而有效提高站台及列车利用率。
61、(2)与间距相关的参数得以具体优化:将三阶段制动优化为两个阶段:三个阶段的第一阶段加速度,可假设为在停车阶段的撞硬墙阶段,自动驾驶的控制模块不再输出牵引,仅使用惰行和制动完成精确停车;跟随列车的一次制动率小于领车:虚拟编组的精确停车阶段,跟随列车单元的一次制动率的选取,可适当小于虚拟编组领车的一次制动率;缩小在撞硬墙阶段的跟随列车单元在停车点精确停车时所需的停车点到移动授权终点的距离voff:通过控制算法的改进,保证自动驾驶控制模块能够与紧急制动触发曲线较小的差值下运行而不超速。
62、(3)确定安全约束,从而采用参数优化控制和/或硬件结合的方式辅助明确间距优化后的精确停车的具体实施方式。
63、参数优化控制方面,控制虚拟编组的多个列车单元协同退行;控制虚拟编组中的跟随列车单元在预设的速度阈值之下,跟随列车的ato控制单元限制使用牵引,而使用惰行和制动调节两阶段完成精确停车;硬件方面:采用高精度传感器及控制器缩小列车的定位误差、停车精度、以及溜车防护的距离,从而进一步缩小虚拟编组列车的列车单元间停车间隔。
64、应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本公开的实施例的关键或重要特征,亦非用于限制本公开的范围。本公开的其它特征将通过以下的描述变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!