高速列车群分布式协同运行控制方法、系统、终端及介质
本发明涉及轨道交通控制,尤其涉及一种高速列车群分布式协同运行控制方法、系统、终端及介质。
背景技术:
1、铁路运输一直占据我国交通运输领域的骨干地位,作为国家关键基础设施和产业,铁路以其较大的运载量、较高的运输效率、较低的能源消耗和低廉的成本,对我国国民经济发展和大众化交通出行起着全局性的支撑作用。随着列车速度的提高,其运行安全性,乘车舒适性的要求也变得越来越严格。随着高铁行车密度的日渐增加,运行过程中列车之间的相互影响更加明显。
2、目前针对列车群的运行控制,存在一些考虑运行效率、运行安全等因素的工作。但针对高速列车在速度跟踪时产生较大超调,造成速度偏差较大,调节时间加长的研究甚少。而改变控制策略或者增加控制目标通常需要改变控制结构,给系统设计和实现造成一定困难。因此,探索一种无需改变原有控制结构,同时满足列车群协同目标、保证列车群安全平稳高效运行的控制方案尤为重要。
3、中国专利cn114670901a公开了一种基于势函数的多列车协同巡航控制方法及系统,该发明提出构建基于列车的实际追踪距离以及期望安全距离的两列车之间的势函数;计算每列列车与其他列车的所述势函数的负梯度得到每列列车的负反馈;构建各列车的控制变量并作用于列车的牵引制动系统产生牵引力或制动力。中国专利cn110901703b公开了一种高速列车移动协同闭塞控制方法及系统,该发明将待控制列车期望速度、前后列车的位置以及前后列车的期望相对距离输入到所述分布式协同控制模型中,求解得到并执行实时执行待控制列车的控制牵引力以实现多列车协同控制。中国专利cn110901703b公开了一种高速列车移动协同闭塞控制方法及系统,提出将高速列车在运行过程中的能耗和乘坐舒适性均作为优化目标。以上现有技术主要考虑列车间的速度跟踪协同、安全距离控制等目标,缺乏对列车速度超调以及列车受到的基本阻力和附加阻力的考虑,由此,本发明提供了一种能够以高速列车组为研究对象,解决其运行过程中速度一致性、跟踪速度超调、安全距离和阻力影响等关键问题的方法。本发明的研发由国家自然科学基金项目62172448、校企联合项目《重载货运列车自组网高密度自动运行控制技术研究及应用》提供部分支持。
技术实现思路
1、为了解决上述问题,本发明提供了一种高速列车群分布式协同运行控制方法、系统、终端及介质,其中,所述方法减少高速列车的速度超调,并使得高速列车群的速度趋于一致,列车相邻距离保持在安全状态,同时克服了阻力的影响,在提高高速列车群运行效率的同时,保证了高速列车群的安全稳定。
2、第一方面,本发明提供了一种高速列车群分布式协同运行控制方法,包括:
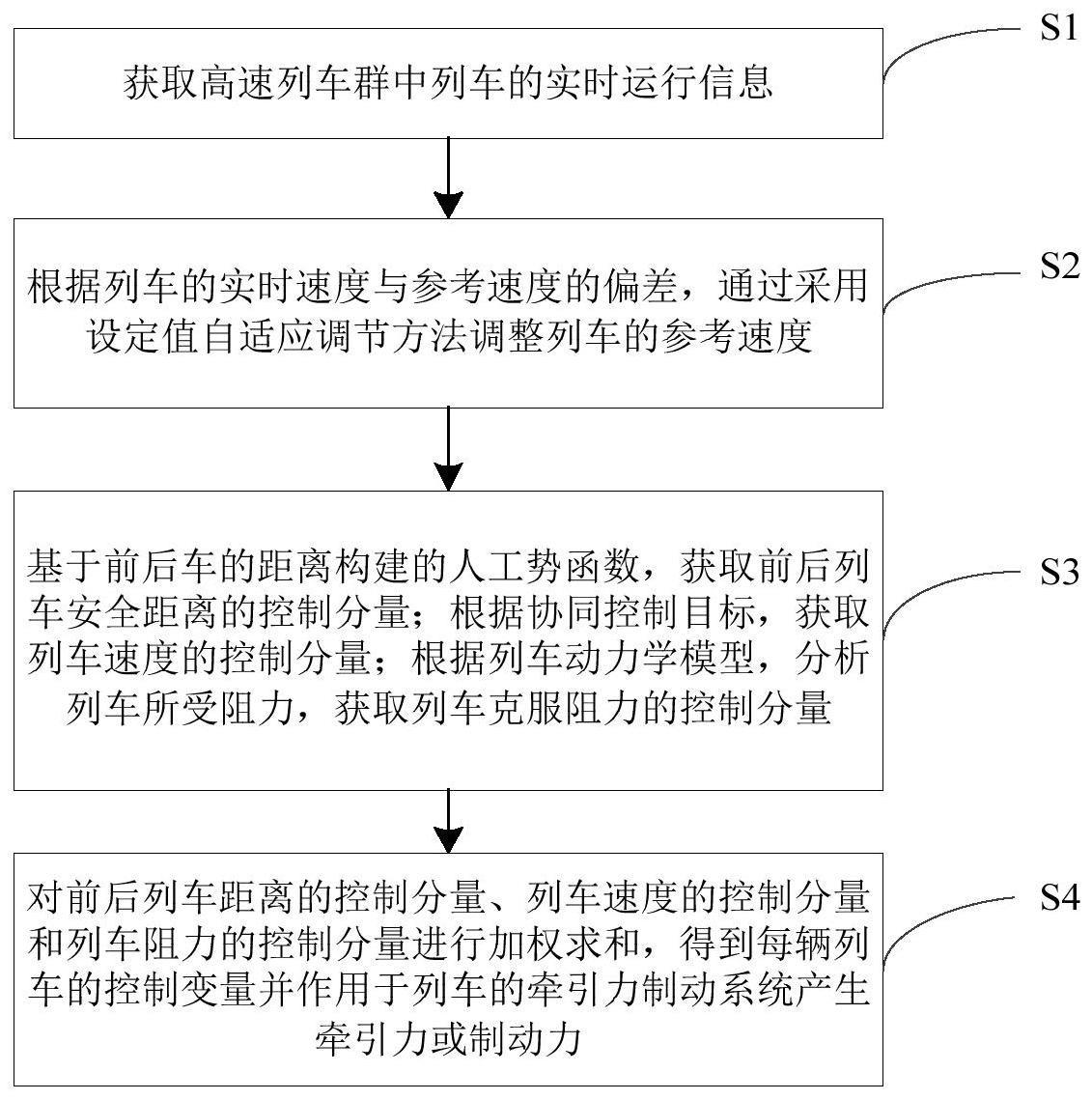
3、s1:获取高速列车群中列车的实时运行信息;其中,所述运行信息包括每辆列车的速度信息和位置信息;
4、s2:根据列车的实时速度与参考速度的偏差,通过采用设定值自适应调节方法调整列车的参考速度;
5、s3:基于前后车的距离构建的人工势函数,获取前后列车安全距离的控制分量ui1(t);根据协同控制目标,获取列车速度的控制分量ui2(t);根据列车动力学模型,分析列车所受阻力,获取列车克服阻力的控制分量ui3(t);
6、s4:对前后列车距离的控制分量、列车速度的控制分量和列车阻力的控制分量进行加权求和,得到每辆列车的控制变量。
7、进一步地,所述设定值自适应调节方法的具体步骤为:
8、s2.1:计算列车实时速度与参考速度的速度偏差,其中速度偏差的计算公式为:
9、ei(t)=v*-vi(t)
10、其中,v*为列车的参考速度,vi(t)为t时刻列车i的实时速度,ei(t)为t时刻列车i的速度偏差;
11、s2.2:使用超前补偿器进一步预测列车i的未来速度偏差pi(t);所述超前补偿器的表达式为:
12、
13、其中,pi(s)为pi(t)的拉普拉斯变换,ei(s)为ei(t)的拉普拉斯变换;α和t均为设计参数;超前补偿器在[1/t,1/αt]的频率范围为系统提供超前相位;
14、步骤2.3:根据预测得到的未来速度偏差pi(t),得到列车i的参考速度调整项mi(t),表达式为:
15、mi(t)=μ×pi(t)
16、其中,μ是一个比例常数;
17、s2.4:当预测得到的未来速度偏差pi(t)超出预设允许范围时,调整列车i的参考速度当速度偏差在允许范围内时,维持原有的参考速度v*;其中,参考速度调整过程表示为:
18、
19、其中emin为速度偏差允许范围的上界;emax为速度偏差允许范围的下界。
20、进一步地,所述人工势能函数为:
21、
22、其中,v(dij)表示列车i与列车j之间的人工势场势能,dij为列车i与列车j之间的距离,d*为安全距离;
23、所述前后列车安全距离的控制分量ui1(t)为:
24、
25、进一步地,所述协同控制目标为控制所有列车跟随参考速度,并且所有列车速度趋向一致;所述列车速度的控制分量ui2(t)为:
26、
27、其中,mi为列车i的质量,gi为虚拟领导参数;为列车i的参考速度,vi(t)为列车i在t时刻的速度,n为列车数,aij为邻接参数,vj(t)为列车j在t时刻的速度。
28、进一步地,所述根据列车动力学模型,分析列车所受阻力,获取列车克服阻力的控制分量的过程具体为:
29、获取列车i在t时刻所受的机械阻力中系数表示为:
30、
31、其中为高速列车i的滚动阻力系数,为高速列车i因摩擦和振动产生的的阻力系数,vi(t)为列车i在t时刻的速度;
32、获取列车i在t时刻所受的空气阻力中系数表示为:
33、
34、其中为空气阻力系数;
35、获取列车i在t时刻由轨道坡度、曲率的外部因素引起的附加阻力中的表示为:
36、
37、
38、
39、其中,为列车i轨道坡度引起的坡度阻力,为列车i所受的曲率阻力,g为重力加速度,θi(t)列车i所处轨道的坡度角,di(t)为列车i所处轨道的曲率度;
40、故,列车i所受阻力之和为:
41、
42、列车克服阻力的控制分量ui3(t)如下:
43、
44、其中,mi为列车i的质量。
45、进一步地,所述每辆列车的控制变量ui(t)为:
46、ui(t)=k1ui1(t)+k2ui2(t)+ui3(t)
47、其中k1和k2均为权重系数,且是正的参数,ui(t)表示列车i的控制变量,即列车i的受控牵引力或者制动力。
48、第二方面,本发明提供了一种高速列车群分布式协同运行控制系统,包括:
49、测量模块:用于从车载设备和轨旁设备获取高速列车的实时运行信息,所述运行信息包括每辆列车的速度信息和位置信息;
50、设定值自适应调节模块:用于根据列车的实时速度与参考速度的偏差,及时调整列车的参考速度;
51、通信模块:用于对高速列车群中相邻高速列车之间的实时运行信息进行相互传输;
52、控制模块:用于根据高速列车自身的实时运行信息以及通信接收到的其他列车的实时运行信息,得到每辆高速列车的控制变量,其中,所述控制变量包括:基于前后车的距离构建的人工势函数获取的前后列安全车距离的控制分量ui1(t);根据协同控制目标获取的列车速度的控制分量ui2(t);根据列车动力学模型,并结合列车所受阻力获取的列车克服阻力的控制分量ui3(t);
53、动力模块:用于根据控制变量输出相应的牵引力或制动力,控制高速列车的速度变化。
54、第三方面,本发明提供了一种电子终端,包括处理器和存储器,所述存储器存储了计算机程序,所述处理器调用所述计算机程序以执行如上所述方法的步骤。
55、第四方面,本发明提供了一种可读存储介质:存储了计算机程序,所述计算机程序被处理器调用时以执行如上所述方法的步骤。
56、有益效果
57、本发明提出了一种高速列车群分布式协同运行控制方法、系统、终端及介质,其中方法采用具有预测能力的设定值自适应调节方法,在不改变原有控制结构的情况下,根据列车实时速度反馈自适应地调整调整列车的参考速度,以减少列车的速度超调,使速度相对稳定,避免碰撞或通信损失的风险;考虑前后车的距离,利用人工势场理论描述列车的安全性能,从而控制列车的相邻距离保持在预期的安全距离,在保证安全运行的同时,缩短列车之间的跟踪间隔;根据协同控制目标,控制所有列车速度趋向一致并跟踪参考速度,以提高铁路的整体运行效率;根据列车动力学模型分析列车所受阻力,克服基本阻力和附加阻力影响。本发明的技术方案减少高速列车的速度超调,并使得高速列车群的速度趋于一致,列车相邻距离保持在安全状态,同时克服了阻力的影响,在提高高速列车群运行效率的同时,保证了高速列车群的安全稳定。
- 还没有人留言评论。精彩留言会获得点赞!