一种基于移动闭塞方式的群组列车自动过分相方法及系统
本发明涉及轨道交通,特别涉及一种基于移动闭塞方式的群组列车自动过分相方法及系统。
背景技术:
1、供电气化铁路电力机车运行的电流并不是由一个供电所提供的,一般是一个供电所负责一定的区域,两个供电所之间电流的相位是不一定相同的,所以在连接两个供电所电网之间是一段没有电的分相区。列车长距离行驶过程中,会经过上述分相区,这个过程被称之为列车过分相。地面在分相区外一定距离处设有“断”、“合”提示牌,列车通过时必须退级(牵引力降至0)、关闭辅助机组、断开主断路器,惰行通过分相区后再逐项恢复(闭合主断路器、启动辅机、将牵引力级位逐步恢复到与分相前相同的值),这样受电弓是在无电流情况下进出分相区,保证了受电弓和接触网的安全。
2、随着群组列车技术发展的需求,群组列车自动过分相时通过接触网中性无电区的速度损失将影响群组列车间的协同控制性能。
技术实现思路
1、针对上述问题,本发明提供一种基于移动闭塞方式的群组列车自动过分相方法及系统。
2、一种基于移动闭塞方式的列车自动过分相方法,所述方法包括:
3、确认分相区位置;
4、根据分相区位置和列车行驶状态计算动态授权终点eoa,依据动态授权终点eoa计算列车自动驾驶系统ato控车曲线,并控制列车通过分相区。
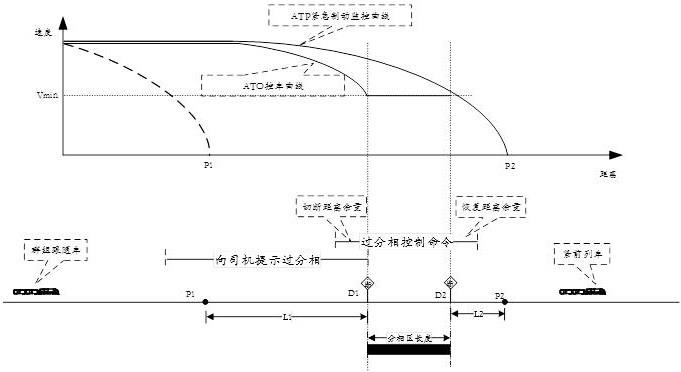
5、进一步的,所述分相区位置包括沿列车行进方向依次连接的惰行困难地段、分相区地段和过分相保护地段;
6、惰行困难地段起点为p1,分相区地段起点为d1,分相区地段终点为d2,过分相保护地段终点为p2。
7、进一步的,所述惰行困难地段的长度l1根据列车参数和线路数据确定,根据分相区地段起点d1和惰行困难地段的长度l1得出p1位置;
8、惰行困难地段的长度l1的确定过程具体为:列车安全通过分相区最低速度为vmin;假设由p1点匀加速至d1点,则vmin2=2*a*l1,l1=vmin2/(2*a);其中a为列车可允许范围内的中值加速度。
9、进一步的,所述过分相保护地段的长度l2等于列车动力段长度与列车安全防护距离之和,根据分相区地段终点为d2和过分相保护地段的长度l2得出p2位置。
10、进一步的,所述根据分相区位置和列车行驶状态计算动态授权终点eoa,依据动态授权终点eoa计算列车自动驾驶系统ato控车曲线,包括:
11、列车包括单列列车和群组列车,列车eoa包括单列列车eoa、群组首车eoa和群组跟随车eoa;
12、单列列车eoa和群组首车eoa,通过群组首车自动防护系统atp按照地面的移动授权ma确定eoa,根据eoa计算ato控车曲线并进行速度监控与超速防护;
13、群组跟随车eoa通过群组跟随车自动防护系统atp根据车车通信或地面设备gcc获取其紧前列车的速度和位置信息,结合列车参数和线路数据自主计算eoa,根据eoa计算ato控车曲线并进行速度监控与超速防护。
14、进一步的,所述根据分相区位置和列车行驶状态计算动态授权终点eoa,包括:列车间的间隔采用移动闭塞规则时,根据地面发送的ma或车车通信计算动态eoa;过分相区时,列车动态eoa落在p1至p2的区域内此时列车eoa不更新,eoa保持在p1位置不变,直到计算的eoa越过p2位置,恢复实时更新动态eoa;
15、列车间的间隔采用固定闭塞规则时,根据地面发送的ma或车车通信计算动态eoa;过分相区时,若分相区位于一个固定闭塞区内部,列车动态eoa首先落在该固定闭塞区起点,待固定闭塞区允许通行后,列车动态eoa落在p1至p2的区域内此时列车动态eoa不更新,动态eoa保持在p1位置不变,直到计算的动态eoa越过p2位置,列车恢复实时更新动态eoa;过分相区时,若分相区位于两个固定闭塞区交界处,列车动态eoa首先落在第一个固定闭塞区起点,待第一个固定闭塞区允许通行后,列车动态eoa落在p1至p2的区域内此时列车动态eoa不更新,动态eoa保持在p1位置不变,当计算的动态eoa越过p2位置且第二个固定闭塞区允许通行,列车恢复实时更新动态eoa。
16、进一步的,所述控制列车通过分相区,包括:采用车载列车自动驾驶系统ato设备控制列车自动驾驶时,车载ato负责在车载atp的安全防护下自动驾驶列车运行,车载ato在分相区地段采用蓄电池供电进行列车牵引,直到恢复接触网供电。
17、进一步的,所述控制列车通过分相区,还包括:在分相区地段前的速度不低于vmin,vmin为列车通过分相区地段的最低速度。
18、一种基于移动闭塞方式的列车自动过分相系统,包括:
19、确认分相区位置单元,用于确认分相区位置;
20、过分相区控制单元,用于根据分相区位置和列车行驶状态计算动态授权终点eoa,依据动态授权终点eoa计算列车自动驾驶系统ato控车曲线并控制列车通过分相区。
21、进一步的,所述分相区位置包括沿列车行进方向依次连接的惰行困难地段、分相区地段和过分相保护地段;
22、惰行困难地段起点为p1,分相区地段起点为d1,分相区地段终点为d2,过分相保护地段终点为p2。
23、进一步的,所述过分相区控制单元,计算动态授权终点eoa,依据动态授权终点eoa计算列车自动驾驶系统ato控车曲线,具体包括:
24、列车包括单列列车和群组列车,列车eoa包括单列列车eoa、群组首车eoa和群组跟随车eoa;
25、单列列车eoa和群组首车eoa,通过群组首车自动防护系统atp按照地面的移动授权ma确定eoa,根据eoa计算ato控车曲线并进行速度监控与超速防护;
26、群组跟随车eoa通过群组跟随车自动防护系统atp根据车车通信或地面设备gcc获取其紧前列车的速度和位置信息,结合列车参数和线路数据自主计算eoa,根据eoa计算ato控车曲线并进行速度监控与超速防护。
27、本发明可使群组列车自动通过分相,优点在于用群组列车来控制一个列车群,统筹协调各列车,进而获取群体的最优化,从而在不增加轴重,不增加列车长度的前提下,仅通过列车控制系统的改变,实现大幅提高行车密度,获得最大运力。
28、本发明有效解决列车在通过接触网中性无电区时的速度损失问题,列车过分相时行车速度基本无损失,且响应快,能大大缩短掉电时间,显著缩短列车过分相时间,增强了区间通过能力;可解决列车通过长大坡道时过分相难题。
29、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
技术特征:
1.一种基于移动闭塞方式的列车自动过分相方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种基于移动闭塞方式的列车自动过分相方法,其特征在于,
3.根据权利要求2所述的一种基于移动闭塞方式的列车自动过分相方法,其特征在于,
4.根据权利要求2所述的一种基于移动闭塞方式的列车自动过分相方法,其特征在于,
5.根据权利要求1所述的一种基于移动闭塞方式的列车自动过分相方法,其特征在于,
6.根据权利要求2所述的一种基于移动闭塞方式的列车自动过分相方法,其特征在于,
7.根据权利要求2所述的一种基于移动闭塞方式的列车自动过分相方法,其特征在于,
8.根据权利要求3所述的一种基于移动闭塞方式的列车自动过分相方法,其特征在于,
9.一种基于移动闭塞方式的列车自动过分相系统,其特征在于,包括:
10.根据权利要求9所述的一种基于移动闭塞方式的列车自动过分相系统,其特征在于,
11.根据权利要求9所述的一种基于移动闭塞方式的列车自动过分相系统,其特征在于,
技术总结
本发明涉及轨道交通技术领域,特别涉及一种基于移动闭塞方式的群组列车自动过分相方法及系统,随着群组列车技术发展的需求,群组列车自动过分相时通过接触网中性无电区的速度损失将影响群组列车间的协同控制性能。针对此问题,本发明首先确定分相区位置,车载ATP根据地面提供的分相区信息,在距分相区起点一定时间时输出过分相控制命令,车头越过分相区终点一定距离后撤销过分相控制命令,从而实现自动过分相。本发明有效解决列车在通过接触网中性无电区时的速度损失问题,列车过分相时行车速度基本无损失,且响应快,能大大缩短掉电时间,显著缩短列车过分相时间,增强了区间通过能力;可解决列车通过长大坡道时过分相难题。
技术研发人员:李蔚,邢毅,姚文华,于晓泉
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!